 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl-DINO: Feature Space Conditioning for Controllable Image-to-Video Diffusion
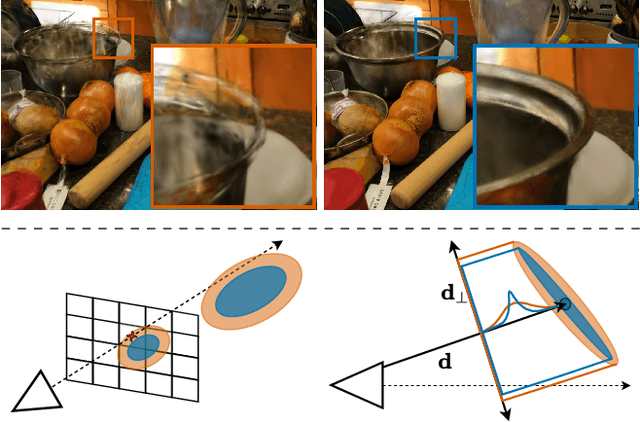
Apr 02, 2026Video models have recently been applied with success to problems in content generation, novel view synthesis, and, more broadly, world simulation. Many applications in generation and transfer rely on conditioning these models, typically through perceptual, geometric, or simple semantic signals, fundamentally using them as generative renderers. At the same time, high-dimensional features obtained from large-scale self-supervised learning on images or point clouds are increasingly used as a general-purpose interface for vision models. The connection between the two has been explored for subject specific editing, aligning and training video diffusion models, but not in the role of a more general conditioning signal for pretrained video diffusion models. Features obtained through self-supervised learning like DINO, contain a lot of entangled information about style, lighting and semantics of the scene. This makes them great at reconstruction tasks but limits their generative capabilities. In this paper, we show how we can use the features for tasks such as video domain transfer and video-from-3D generation. We introduce a lightweight architecture and training strategy that decouples appearance from other features that we wish to preserve, enabling robust control for appearance changes such as stylization and relighting. Furthermore, we show that low spatial resolution can be compensated by higher feature dimensionality, improving controllability in generative rendering from explicit spatial representations.
Autoregressive Appearance Prediction for 3D Gaussian Avatars
Apr 01, 2026A photorealistic and immersive human avatar experience demands capturing fine, person-specific details such as cloth and hair dynamics, subtle facial expressions, and characteristic motion patterns. Achieving this requires large, high-quality datasets, which often introduce ambiguities and spurious correlations when very similar poses correspond to different appearances. Models that fit these details during training can overfit and produce unstable, abrupt appearance changes for novel poses. We propose a 3D Gaussian Splatting avatar model with a spatial MLP backbone that is conditioned on both pose and an appearance latent. The latent is learned during training by an encoder, yielding a compact representation that improves reconstruction quality and helps disambiguate pose-driven renderings. At driving time, our predictor autoregressively infers the latent, producing temporally smooth appearance evolution and improved stability. Overall, our method delivers a robust and practical path to high-fidelity, stable avatar driving.
Confidence-Based Mesh Extraction from 3D Gaussians
Mar 25, 2026Recently, 3D Gaussian Splatting (3DGS) greatly accelerated mesh extraction from posed images due to its explicit representation and fast software rasterization. While the addition of geometric losses and other priors has improved the accuracy of extracted surfaces, mesh extraction remains difficult in scenes with abundant view-dependent effects. To resolve the resulting ambiguities, prior works rely on multi-view techniques, iterative mesh extraction, or large pre-trained models, sacrificing the inherent efficiency of 3DGS. In this work, we present a simple and efficient alternative by introducing a self-supervised confidence framework to 3DGS: within this framework, learnable confidence values dynamically balance photometric and geometric supervision. Extending our confidence-driven formulation, we introduce losses which penalize per-primitive color and normal variance and demonstrate their benefits to surface extraction. Finally, we complement the above with an improved appearance model, by decoupling the individual terms of the D-SSIM loss. Our final approach delivers state-of-the-art results for unbounded meshes while remaining highly efficient.
From ex(p) to poly: Gaussian Splatting with Polynomial Kernels
Mar 19, 2026Recent advancements in Gaussian Splatting (3DGS) have introduced various modifications to the original kernel, resulting in significant performance improvements. However, many of these kernel changes are incompatible with existing datasets optimized for the original Gaussian kernel, presenting a challenge for widespread adoption. In this work, we address this challenge by proposing an alternative kernel that maintains compatibility with existing datasets while improving computational efficiency. Specifically, we replace the original exponential kernel with a polynomial approximation combined with a ReLU function. This modification allows for more aggressive culling of Gaussians, leading to enhanced performance across different 3DGS implementations. Our results show a notable performance improvement of 4 to 15% with negligible impact on image quality. We also provide a detailed mathematical analysis of the new kernel and discuss its potential benefits for 3DGS implementations on NPU hardware.
Scene Generation at Absolute Scale: Utilizing Semantic and Geometric Guidance From Text for Accurate and Interpretable 3D Indoor Scene Generation
Mar 14, 2026We present GuidedSceneGen, a text-to-3D generation framework that produces metrically accurate, globally consistent, and semantically interpretable indoor scenes. Unlike prior text-driven methods that often suffer from geometric drift or scale ambiguity, our approach maintains an absolute world coordinate frame throughout the entire generation process. Starting from a textual scene description, we predict a global 3D layout encoding both semantic and geometric structure, which serves as a guiding proxy for downstream stages. A semantics- and depth-conditioned panoramic diffusion model then synthesizes 360° imagery aligned with the global layout, substantially improving spatial coherence. To explore unobserved regions, we employ a video diffusion model guided by optimized camera trajectories that balances coverage and collision avoidance, achieving up to 10x faster sampling compared to exhaustive path exploration. The generated views are fused using 3D Gaussian Splatting, yielding a consistent and fully navigable 3D scene in absolute scale. GuidedSceneGen enables accurate transfer of object poses and semantic labels from layout to reconstruction, and supports progressive scene expansion without re-alignment. Quantitative results and a user study demonstrate greater 3D consistency and layout plausibility compared to recent panoramic text-to-3D baselines.
Pi-GS: Sparse-View Gaussian Splatting with Dense π^3 Initialization
Feb 03, 2026Novel view synthesis has evolved rapidly, advancing from Neural Radiance Fields to 3D Gaussian Splatting (3DGS), which offers real-time rendering and rapid training without compromising visual fidelity. However, 3DGS relies heavily on accurate camera poses and high-quality point cloud initialization, which are difficult to obtain in sparse-view scenarios. While traditional Structure from Motion (SfM) pipelines often fail in these settings, existing learning-based point estimation alternatives typically require reliable reference views and remain sensitive to pose or depth errors. In this work, we propose a robust method utilizing π^3, a reference-free point cloud estimation network. We integrate dense initialization from π^3 with a regularization scheme designed to mitigate geometric inaccuracies. Specifically, we employ uncertainty-guided depth supervision, normal consistency loss, and depth warping. Experimental results demonstrate that our approach achieves state-of-the-art performance on the Tanks and Temples, LLFF, DTU, and MipNeRF360 datasets.
A LoD of Gaussians: Unified Training and Rendering for Ultra-Large Scale Reconstruction with External Memory
Jul 01, 2025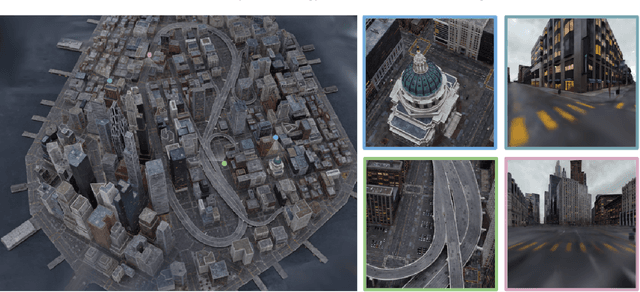

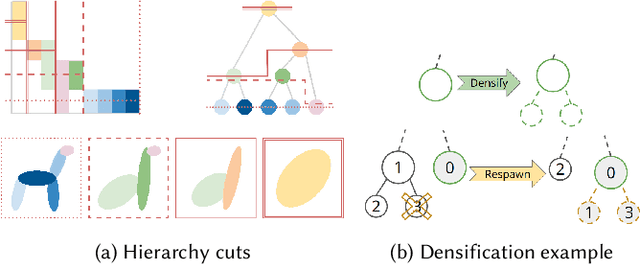

Gaussian Splatting has emerged as a high-performance technique for novel view synthesis, enabling real-time rendering and high-quality reconstruction of small scenes. However, scaling to larger environments has so far relied on partitioning the scene into chunks -- a strategy that introduces artifacts at chunk boundaries, complicates training across varying scales, and is poorly suited to unstructured scenarios such as city-scale flyovers combined with street-level views. Moreover, rendering remains fundamentally limited by GPU memory, as all visible chunks must reside in VRAM simultaneously. We introduce A LoD of Gaussians, a framework for training and rendering ultra-large-scale Gaussian scenes on a single consumer-grade GPU -- without partitioning. Our method stores the full scene out-of-core (e.g., in CPU memory) and trains a Level-of-Detail (LoD) representation directly, dynamically streaming only the relevant Gaussians. A hybrid data structure combining Gaussian hierarchies with Sequential Point Trees enables efficient, view-dependent LoD selection, while a lightweight caching and view scheduling system exploits temporal coherence to support real-time streaming and rendering. Together, these innovations enable seamless multi-scale reconstruction and interactive visualization of complex scenes -- from broad aerial views to fine-grained ground-level details.
SOF: Sorted Opacity Fields for Fast Unbounded Surface Reconstruction
Jun 23, 2025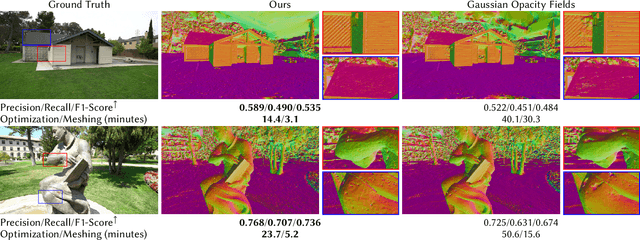
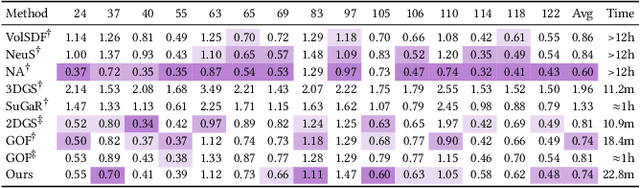
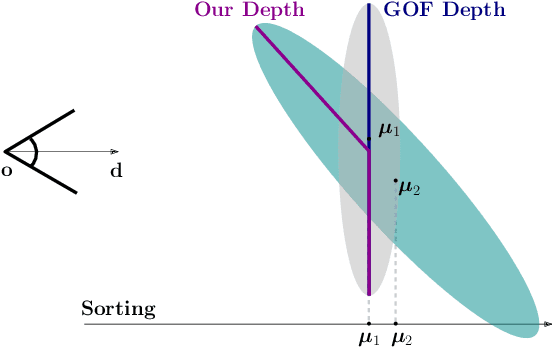
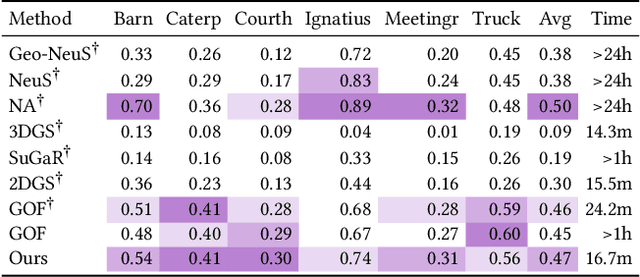
Recent advances in 3D Gaussian representations have significantly improved the quality and efficiency of image-based scene reconstruction. Their explicit nature facilitates real-time rendering and fast optimization, yet extracting accurate surfaces - particularly in large-scale, unbounded environments - remains a difficult task. Many existing methods rely on approximate depth estimates and global sorting heuristics, which can introduce artifacts and limit the fidelity of the reconstructed mesh. In this paper, we present Sorted Opacity Fields (SOF), a method designed to recover detailed surfaces from 3D Gaussians with both speed and precision. Our approach improves upon prior work by introducing hierarchical resorting and a robust formulation of Gaussian depth, which better aligns with the level-set. To enhance mesh quality, we incorporate a level-set regularizer operating on the opacity field and introduce losses that encourage geometrically-consistent primitive shapes. In addition, we develop a parallelized Marching Tetrahedra algorithm tailored to our opacity formulation, reducing meshing time by up to an order of magnitude. As demonstrated by our quantitative evaluation, SOF achieves higher reconstruction accuracy while cutting total processing time by more than a factor of three. These results mark a step forward in turning efficient Gaussian-based rendering into equally efficient geometry extraction.
VRSplat: Fast and Robust Gaussian Splatting for Virtual Reality
May 15, 2025



3D Gaussian Splatting (3DGS) has rapidly become a leading technique for novel-view synthesis, providing exceptional performance through efficient software-based GPU rasterization. Its versatility enables real-time applications, including on mobile and lower-powered devices. However, 3DGS faces key challenges in virtual reality (VR): (1) temporal artifacts, such as popping during head movements, (2) projection-based distortions that result in disturbing and view-inconsistent floaters, and (3) reduced framerates when rendering large numbers of Gaussians, falling below the critical threshold for VR. Compared to desktop environments, these issues are drastically amplified by large field-of-view, constant head movements, and high resolution of head-mounted displays (HMDs). In this work, we introduce VRSplat: we combine and extend several recent advancements in 3DGS to address challenges of VR holistically. We show how the ideas of Mini-Splatting, StopThePop, and Optimal Projection can complement each other, by modifying the individual techniques and core 3DGS rasterizer. Additionally, we propose an efficient foveated rasterizer that handles focus and peripheral areas in a single GPU launch, avoiding redundant computations and improving GPU utilization. Our method also incorporates a fine-tuning step that optimizes Gaussian parameters based on StopThePop depth evaluations and Optimal Projection. We validate our method through a controlled user study with 25 participants, showing a strong preference for VRSplat over other configurations of Mini-Splatting. VRSplat is the first, systematically evaluated 3DGS approach capable of supporting modern VR applications, achieving 72+ FPS while eliminating popping and stereo-disrupting floaters.
* I3D'25 (PACMCGIT); Project Page: https://cekavis.site/VRSplat/
AAA-Gaussians: Anti-Aliased and Artifact-Free 3D Gaussian Rendering
Apr 17, 2025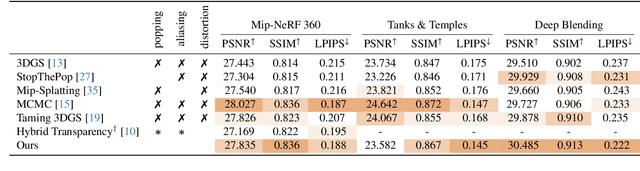
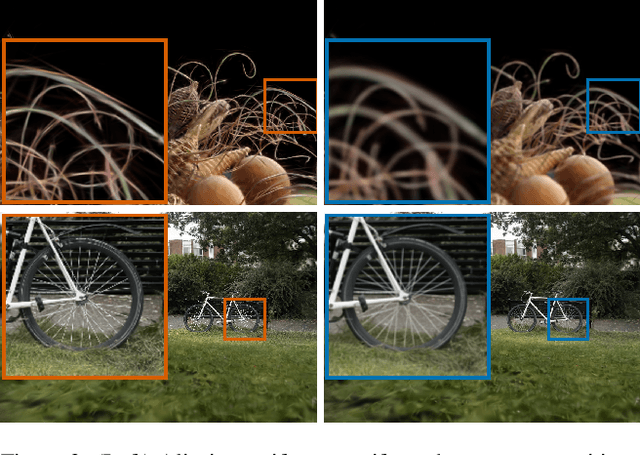

Although 3D Gaussian Splatting (3DGS) has revolutionized 3D reconstruction, it still faces challenges such as aliasing, projection artifacts, and view inconsistencies, primarily due to the simplification of treating splats as 2D entities. We argue that incorporating full 3D evaluation of Gaussians throughout the 3DGS pipeline can effectively address these issues while preserving rasterization efficiency. Specifically, we introduce an adaptive 3D smoothing filter to mitigate aliasing and present a stable view-space bounding method that eliminates popping artifacts when Gaussians extend beyond the view frustum. Furthermore, we promote tile-based culling to 3D with screen-space planes, accelerating rendering and reducing sorting costs for hierarchical rasterization. Our method achieves state-of-the-art quality on in-distribution evaluation sets and significantly outperforms other approaches for out-of-distribution views. Our qualitative evaluations further demonstrate the effective removal of aliasing, distortions, and popping artifacts, ensuring real-time, artifact-free rendering.