 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepLab2: A TensorFlow Library for Deep Labeling
Jun 17, 2021
DeepLab2 is a TensorFlow library for deep labeling, aiming to provide a state-of-the-art and easy-to-use TensorFlow codebase for general dense pixel prediction problems in computer vision. DeepLab2 includes all our recently developed DeepLab model variants with pretrained checkpoints as well as model training and evaluation code, allowing the community to reproduce and further improve upon the state-of-art systems. To showcase the effectiveness of DeepLab2, our Panoptic-DeepLab employing Axial-SWideRNet as network backbone achieves 68.0% PQ or 83.5% mIoU on Cityscaspes validation set, with only single-scale inference and ImageNet-1K pretrained checkpoints. We hope that publicly sharing our library could facilitate future research on dense pixel labeling tasks and envision new applications of this technology. Code is made publicly available at \url{https://github.com/google-research/deeplab2}.
Leveraging Semi-Supervised Learning in Video Sequences for Urban Scene Segmentation
May 22, 2020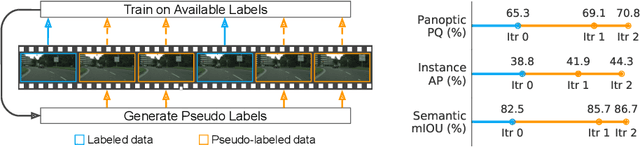
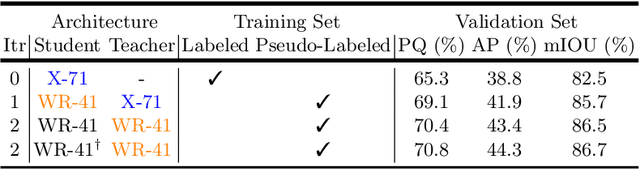
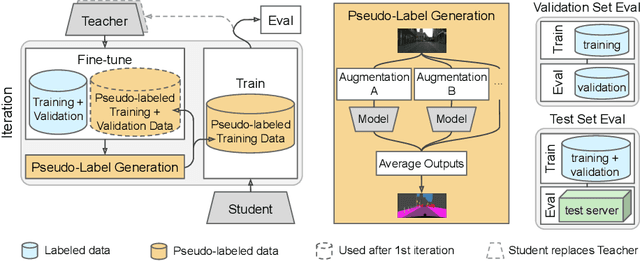
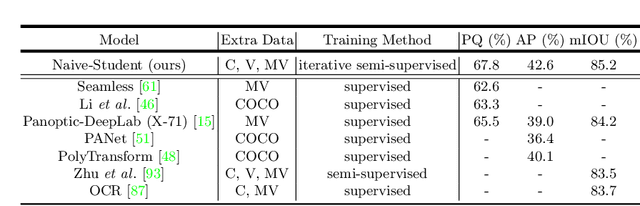
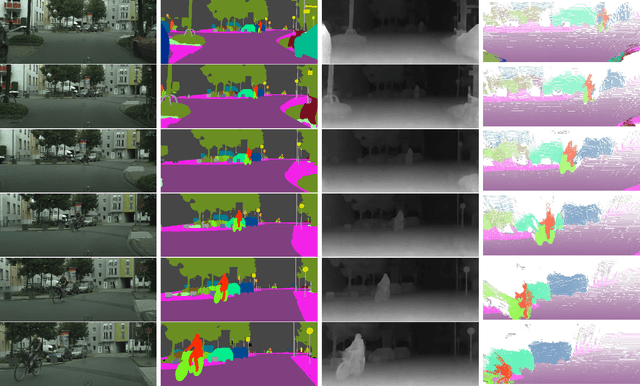
Supervised learning in large discriminative models is a mainstay for modern computer vision. Such an approach necessitates investing in large-scale human-annotated datasets for achieving state-of-the-art results. In turn, the efficacy of supervised learning may be limited by the size of the human annotated dataset. This limitation is particularly notable for image segmentation tasks, where the expense of human annotation is especially large, yet large amounts of unlabeled data may exist. In this work, we ask if we may leverage semi-supervised learning in unlabeled video sequences to improve the performance on urban scene segmentation, simultaneously tackling semantic, instance, and panoptic segmentation. The goal of this work is to avoid the construction of sophisticated, learned architectures specific to label propagation (e.g., patch matching and optical flow). Instead, we simply predict pseudo-labels for the unlabeled data and train subsequent models with both human-annotated and pseudo-labeled data. The procedure is iterated for several times. As a result, our Naive-Student model, trained with such simple yet effective iterative semi-supervised learning, attains state-of-the-art results at all three Cityscapes benchmarks, reaching the performance of 67.8% PQ, 42.6% AP, and 85.2% mIOU on the test set. We view this work as a notable step towards building a simple procedure to harness unlabeled video sequences to surpass state-of-the-art performance on core computer vision tasks.
Panoptic-DeepLab: A Simple, Strong, and Fast Baseline for Bottom-Up Panoptic Segmentation
Dec 06, 2019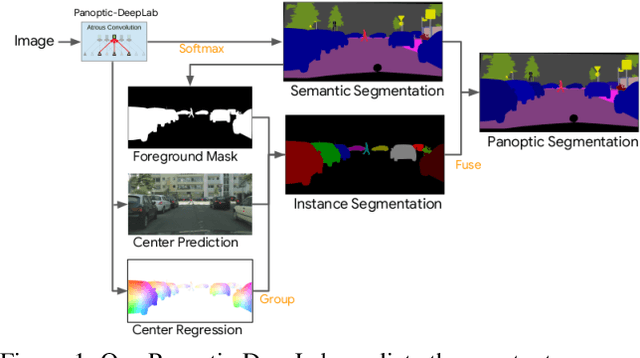
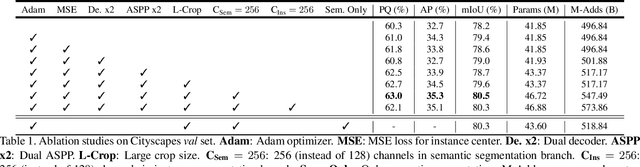
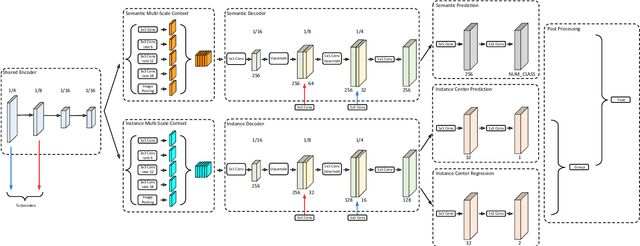
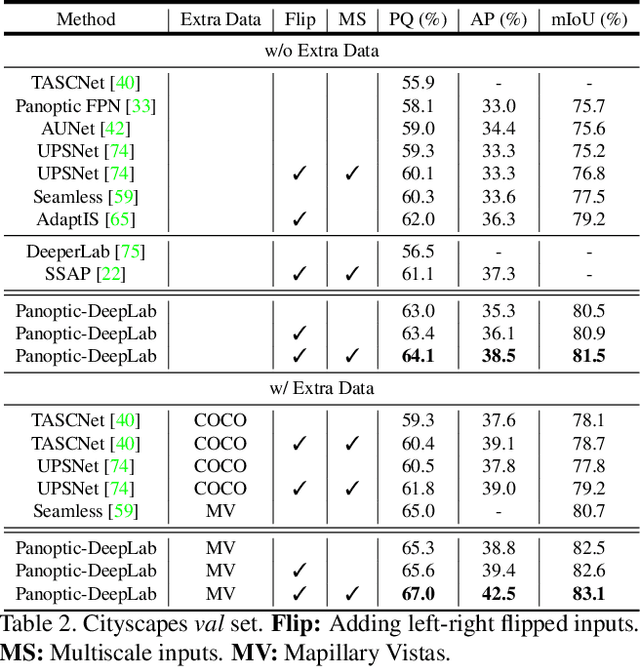
In this work, we introduce Panoptic-DeepLab, a simple, strong, and fast system for panoptic segmentation, aiming to establish a solid baseline for bottom-up methods that can achieve comparable performance of two-stage methods while yielding fast inference speed. In particular, PanopticDeepLab adopts the dual-ASPP and dual-decoder structures specific to semantic, and instance segmentation, respectively. The semantic segmentation branch is the same as the typical design of any semantic segmentation model (e.g., DeepLab), while the instance segmentation branch is class-agnostic, involving a simple instance center regression. As a result, our single Panoptic-DeepLab simultaneously ranks first at all three Cityscapes benchmarks, setting the new state-of-art of 84.2% mIoU, 39.0% AP, and 65.5% PQ on test set. Additionally, equipped with MobileNetV3, Panoptic-DeepLab runs nearly in real-time with a single 1025 x 2049 image (15.8 frames per second), while achieving a competitive performance on Cityscapes (54.1 PQ% on test set). On Mapillary Vistas test set, our ensemble of six models attains 42.7% PQ, outperforming the challenge winner in 2018 by a healthy margin of 1.5%. Finally, our Panoptic-DeepLab also performs on par with several topdown approaches on the challenging COCO dataset. For the first time, we demonstrate a bottom-up approach could deliver state-of-the-art results on panoptic segmentation.
SegSort: Segmentation by Discriminative Sorting of Segments
Oct 30, 2019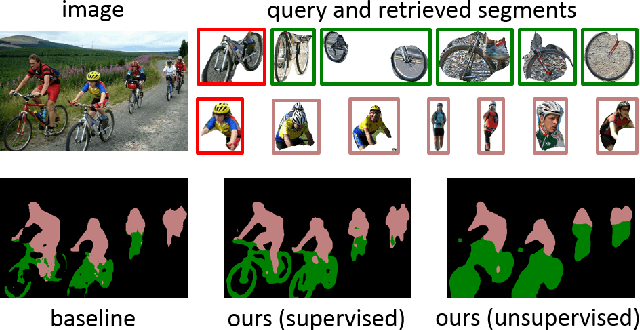
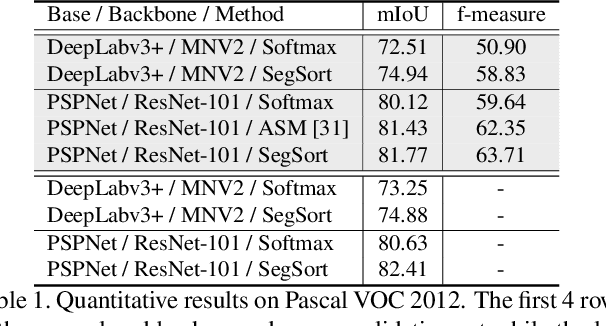
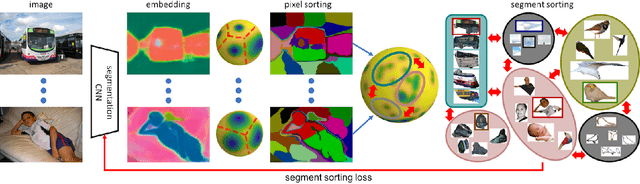
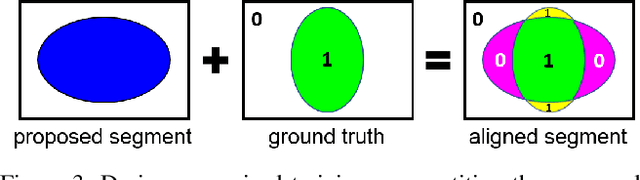
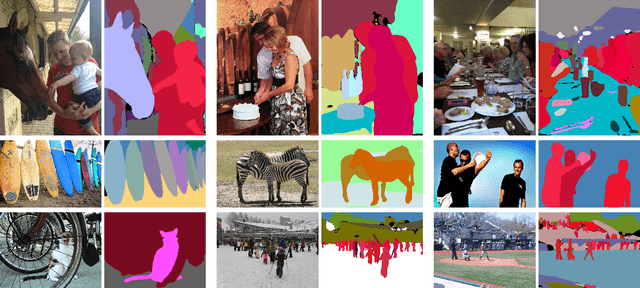
Almost all existing deep learning approaches for semantic segmentation tackle this task as a pixel-wise classification problem. Yet humans understand a scene not in terms of pixels, but by decomposing it into perceptual groups and structures that are the basic building blocks of recognition. This motivates us to propose an end-to-end pixel-wise metric learning approach that mimics this process. In our approach, the optimal visual representation determines the right segmentation within individual images and associates segments with the same semantic classes across images. The core visual learning problem is therefore to maximize the similarity within segments and minimize the similarity between segments. Given a model trained this way, inference is performed consistently by extracting pixel-wise embeddings and clustering, with the semantic label determined by the majority vote of its nearest neighbors from an annotated set. As a result, we present the SegSort, as a first attempt using deep learning for unsupervised semantic segmentation, achieving $76\%$ performance of its supervised counterpart. When supervision is available, SegSort shows consistent improvements over conventional approaches based on pixel-wise softmax training. Additionally, our approach produces more precise boundaries and consistent region predictions. The proposed SegSort further produces an interpretable result, as each choice of label can be easily understood from the retrieved nearest segments.
Panoptic-DeepLab
Oct 24, 2019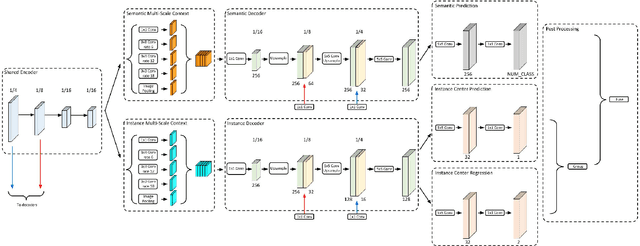
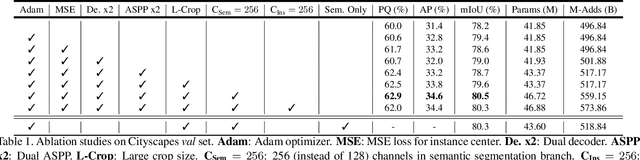
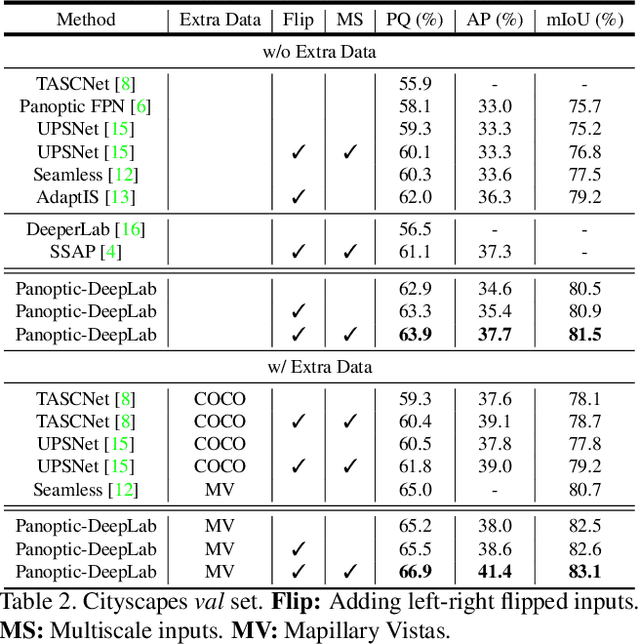
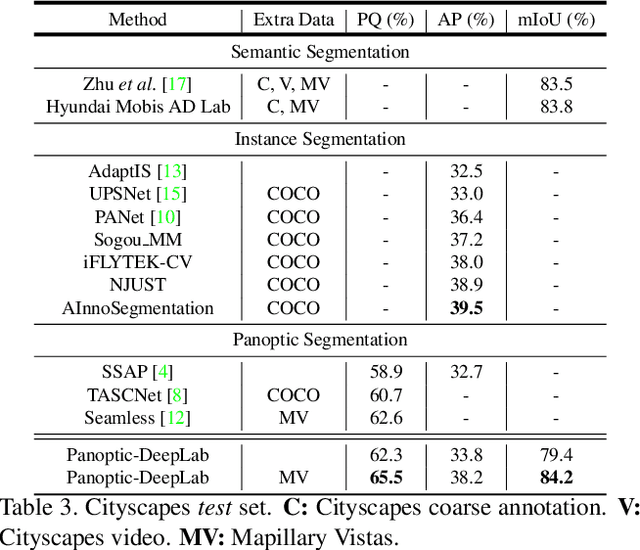
We present Panoptic-DeepLab, a bottom-up and single-shot approach for panoptic segmentation. Our Panoptic-DeepLab is conceptually simple and delivers state-of-the-art results. In particular, we adopt the dual-ASPP and dual-decoder structures specific to semantic, and instance segmentation, respectively. The semantic segmentation branch is the same as the typical design of any semantic segmentation model (e.g., DeepLab), while the instance segmentation branch is class-agnostic, involving a simple instance center regression. Our single Panoptic-DeepLab sets the new state-of-art at all three Cityscapes benchmarks, reaching 84.2% mIoU, 39.0% AP, and 65.5% PQ on test set, and advances results on the other challenging Mapillary Vistas.
DeeperLab: Single-Shot Image Parser
Mar 12, 2019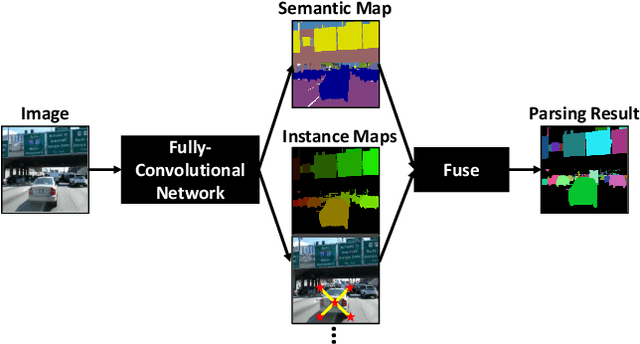
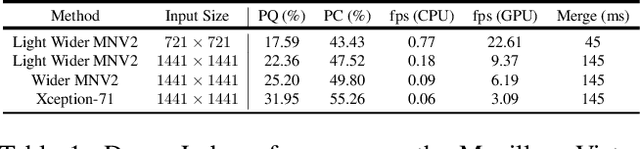


We present a single-shot, bottom-up approach for whole image parsing. Whole image parsing, also known as Panoptic Segmentation, generalizes the tasks of semantic segmentation for 'stuff' classes and instance segmentation for 'thing' classes, assigning both semantic and instance labels to every pixel in an image. Recent approaches to whole image parsing typically employ separate standalone modules for the constituent semantic and instance segmentation tasks and require multiple passes of inference. Instead, the proposed DeeperLab image parser performs whole image parsing with a significantly simpler, fully convolutional approach that jointly addresses the semantic and instance segmentation tasks in a single-shot manner, resulting in a streamlined system that better lends itself to fast processing. For quantitative evaluation, we use both the instance-based Panoptic Quality (PQ) metric and the proposed region-based Parsing Covering (PC) metric, which better captures the image parsing quality on 'stuff' classes and larger object instances. We report experimental results on the challenging Mapillary Vistas dataset, in which our single model achieves 31.95% (val) / 31.6% PQ (test) and 55.26% PC (val) with 3 frames per second (fps) on GPU or near real-time speed (22.6 fps on GPU) with reduced accuracy.
Searching for Efficient Multi-Scale Architectures for Dense Image Prediction
Sep 11, 2018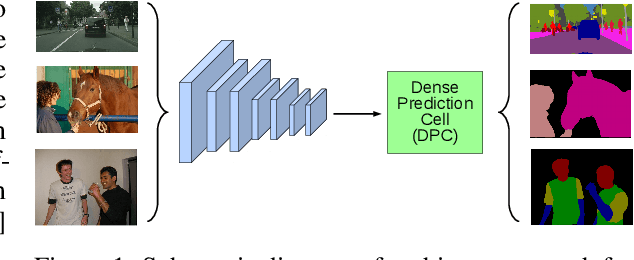
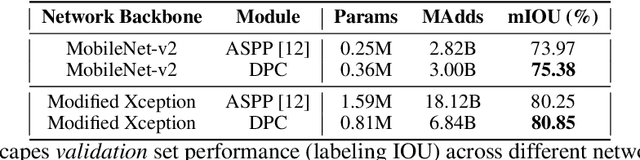
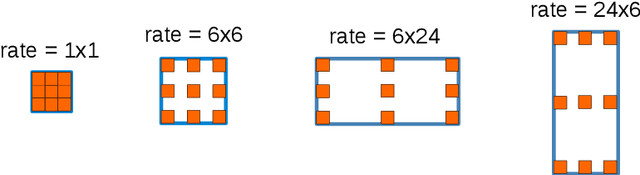
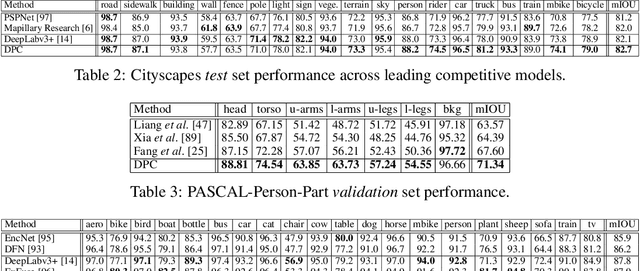
The design of neural network architectures is an important component for achieving state-of-the-art performance with machine learning systems across a broad array of tasks. Much work has endeavored to design and build architectures automatically through clever construction of a search space paired with simple learning algorithms. Recent progress has demonstrated that such meta-learning methods may exceed scalable human-invented architectures on image classification tasks. An open question is the degree to which such methods may generalize to new domains. In this work we explore the construction of meta-learning techniques for dense image prediction focused on the tasks of scene parsing, person-part segmentation, and semantic image segmentation. Constructing viable search spaces in this domain is challenging because of the multi-scale representation of visual information and the necessity to operate on high resolution imagery. Based on a survey of techniques in dense image prediction, we construct a recursive search space and demonstrate that even with efficient random search, we can identify architectures that outperform human-invented architectures and achieve state-of-the-art performance on three dense prediction tasks including 82.7\% on Cityscapes (street scene parsing), 71.3\% on PASCAL-Person-Part (person-part segmentation), and 87.9\% on PASCAL VOC 2012 (semantic image segmentation). Additionally, the resulting architecture is more computationally efficient, requiring half the parameters and half the computational cost as previous state of the art systems.
A Deterministic Nonsmooth Frank Wolfe Algorithm with Coreset Guarantees
Aug 22, 2017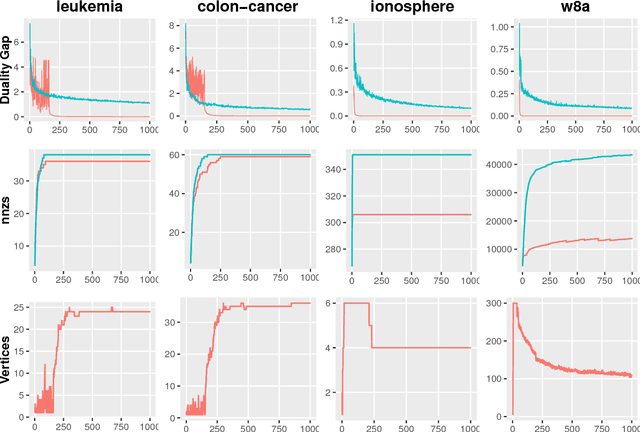
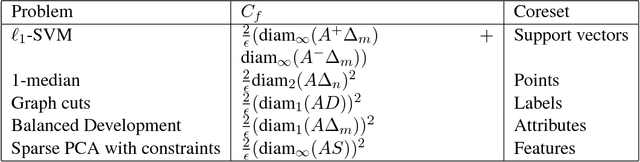
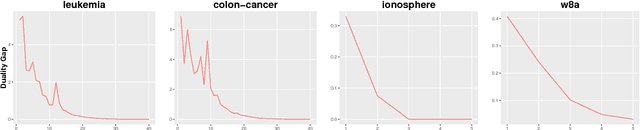
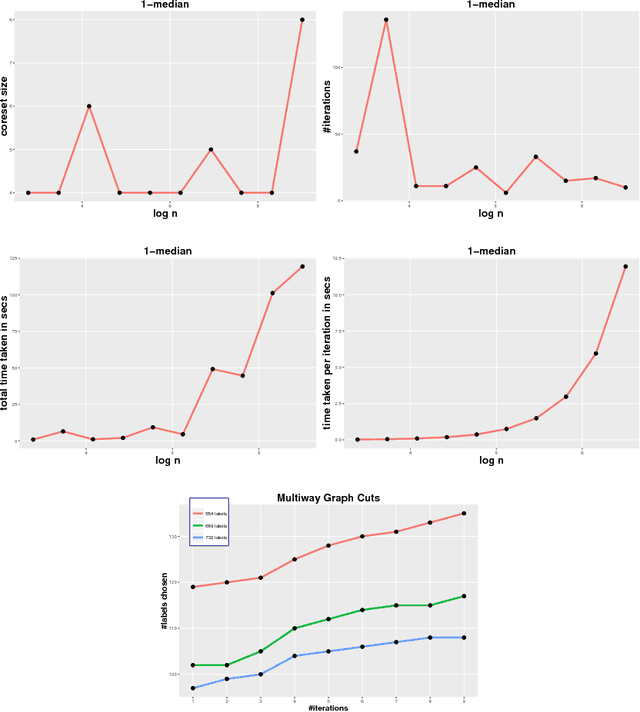
We present a new Frank-Wolfe (FW) type algorithm that is applicable to minimization problems with a nonsmooth convex objective. We provide convergence bounds and show that the scheme yields so-called coreset results for various Machine Learning problems including 1-median, Balanced Development, Sparse PCA, Graph Cuts, and the $\ell_1$-norm-regularized Support Vector Machine (SVM) among others. This means that the algorithm provides approximate solutions to these problems in time complexity bounds that are not dependent on the size of the input problem. Our framework, motivated by a growing body of work on sublinear algorithms for various data analysis problems, is entirely deterministic and makes no use of smoothing or proximal operators. Apart from these theoretical results, we show experimentally that the algorithm is very practical and in some cases also offers significant computational advantages on large problem instances. We provide an open source implementation that can be adapted for other problems that fit the overall structure.
Spatially Adaptive Computation Time for Residual Networks
Jul 02, 2017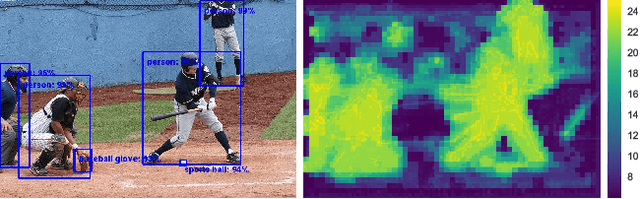
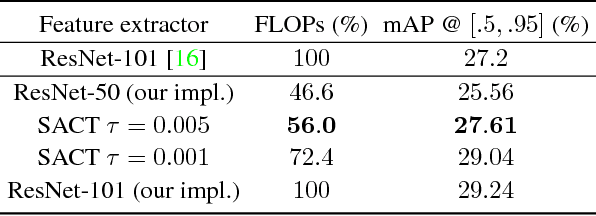
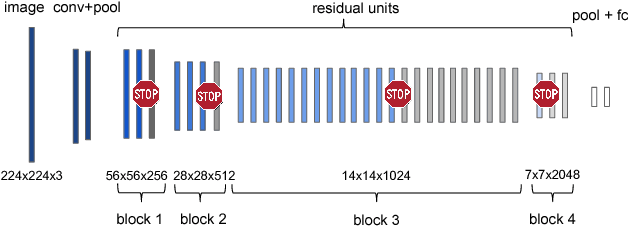
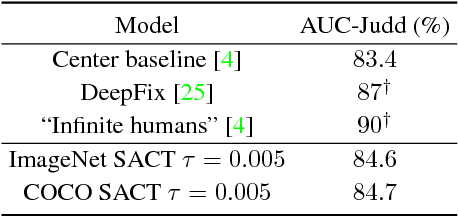
This paper proposes a deep learning architecture based on Residual Network that dynamically adjusts the number of executed layers for the regions of the image. This architecture is end-to-end trainable, deterministic and problem-agnostic. It is therefore applicable without any modifications to a wide range of computer vision problems such as image classification, object detection and image segmentation. We present experimental results showing that this model improves the computational efficiency of Residual Networks on the challenging ImageNet classification and COCO object detection datasets. Additionally, we evaluate the computation time maps on the visual saliency dataset cat2000 and find that they correlate surprisingly well with human eye fixation positions.
Efficient non-greedy optimization of decision trees
Nov 12, 2015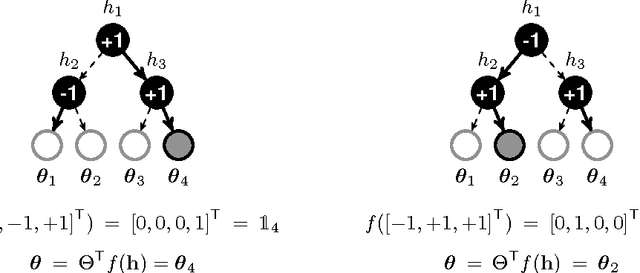
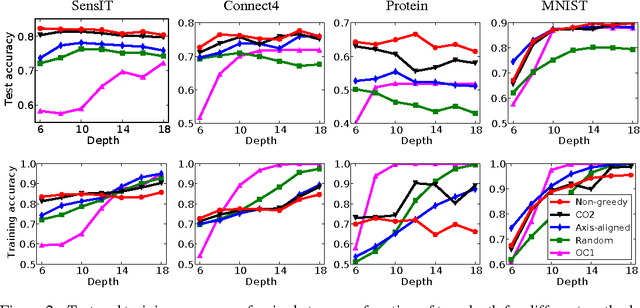
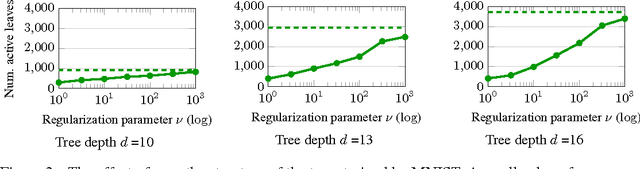
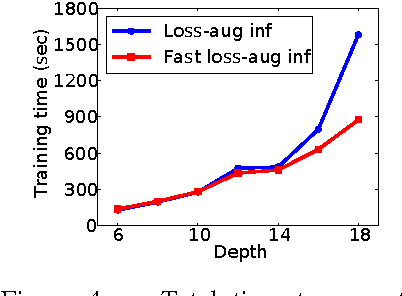
Decision trees and randomized forests are widely used in computer vision and machine learning. Standard algorithms for decision tree induction optimize the split functions one node at a time according to some splitting criteria. This greedy procedure often leads to suboptimal trees. In this paper, we present an algorithm for optimizing the split functions at all levels of the tree jointly with the leaf parameters, based on a global objective. We show that the problem of finding optimal linear-combination (oblique) splits for decision trees is related to structured prediction with latent variables, and we formulate a convex-concave upper bound on the tree's empirical loss. The run-time of computing the gradient of the proposed surrogate objective with respect to each training exemplar is quadratic in the the tree depth, and thus training deep trees is feasible. The use of stochastic gradient descent for optimization enables effective training with large datasets. Experiments on several classification benchmarks demonstrate that the resulting non-greedy decision trees outperform greedy decision tree baselines.