 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Generators are Generalist Vision Learners
Apr 22, 2026Recent works show that image and video generators exhibit zero-shot visual understanding behaviors, in a way reminiscent of how LLMs develop emergent capabilities of language understanding and reasoning from generative pretraining. While it has long been conjectured that the ability to create visual content implies an ability to understand it, there has been limited evidence that generative vision models have developed strong understanding capabilities. In this work, we demonstrate that image generation training serves a role similar to LLM pretraining, and lets models learn powerful and general visual representations that enable SOTA performance on various vision tasks. We introduce Vision Banana, a generalist model built by instruction-tuning Nano Banana Pro (NBP) on a mixture of its original training data alongside a small amount of vision task data. By parameterizing the output space of vision tasks as RGB images, we seamlessly reframe perception as image generation. Our generalist model, Vision Banana, achieves SOTA results on a variety of vision tasks involving both 2D and 3D understanding, beating or rivaling zero-shot domain-specialists, including Segment Anything Model 3 on segmentation tasks, and the Depth Anything series on metric depth estimation. We show that these results can be achieved with lightweight instruction-tuning without sacrificing the base model's image generation capabilities. The superior results suggest that image generation pretraining is a generalist vision learner. It also shows that image generation serves as a unified and universal interface for vision tasks, similar to text generation's role in language understanding and reasoning. We could be witnessing a major paradigm shift for computer vision, where generative vision pretraining takes a central role in building Foundational Vision Models for both generation and understanding.
Visual Chronicles: Using Multimodal LLMs to Analyze Massive Collections of Images
Apr 14, 2025

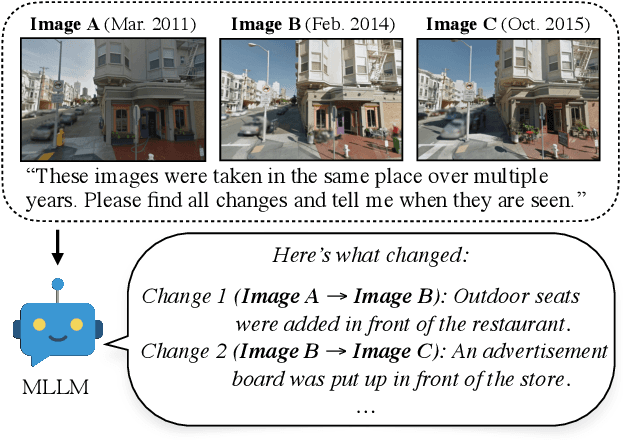
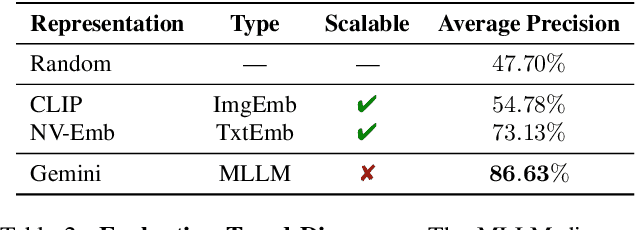
We present a system using Multimodal LLMs (MLLMs) to analyze a large database with tens of millions of images captured at different times, with the aim of discovering patterns in temporal changes. Specifically, we aim to capture frequent co-occurring changes ("trends") across a city over a certain period. Unlike previous visual analyses, our analysis answers open-ended queries (e.g., "what are the frequent types of changes in the city?") without any predetermined target subjects or training labels. These properties cast prior learning-based or unsupervised visual analysis tools unsuitable. We identify MLLMs as a novel tool for their open-ended semantic understanding capabilities. Yet, our datasets are four orders of magnitude too large for an MLLM to ingest as context. So we introduce a bottom-up procedure that decomposes the massive visual analysis problem into more tractable sub-problems. We carefully design MLLM-based solutions to each sub-problem. During experiments and ablation studies with our system, we find it significantly outperforms baselines and is able to discover interesting trends from images captured in large cities (e.g., "addition of outdoor dining,", "overpass was painted blue," etc.). See more results and interactive demos at https://boyangdeng.com/visual-chronicles.
SplatTalk: 3D VQA with Gaussian Splatting
Mar 08, 2025Language-guided 3D scene understanding is important for advancing applications in robotics, AR/VR, and human-computer interaction, enabling models to comprehend and interact with 3D environments through natural language. While 2D vision-language models (VLMs) have achieved remarkable success in 2D VQA tasks, progress in the 3D domain has been significantly slower due to the complexity of 3D data and the high cost of manual annotations. In this work, we introduce SplatTalk, a novel method that uses a generalizable 3D Gaussian Splatting (3DGS) framework to produce 3D tokens suitable for direct input into a pretrained LLM, enabling effective zero-shot 3D visual question answering (3D VQA) for scenes with only posed images. During experiments on multiple benchmarks, our approach outperforms both 3D models trained specifically for the task and previous 2D-LMM-based models utilizing only images (our setting), while achieving competitive performance with state-of-the-art 3D LMMs that additionally utilize 3D inputs.
3D Open-Vocabulary Panoptic Segmentation with 2D-3D Vision-Language Distillation
Jan 04, 2024



3D panoptic segmentation is a challenging perception task, which aims to predict both semantic and instance annotations for 3D points in a scene. Although prior 3D panoptic segmentation approaches have achieved great performance on closed-set benchmarks, generalizing to novel categories remains an open problem. For unseen object categories, 2D open-vocabulary segmentation has achieved promising results that solely rely on frozen CLIP backbones and ensembling multiple classification outputs. However, we find that simply extending these 2D models to 3D does not achieve good performance due to poor per-mask classification quality on novel categories. In this paper, we propose the first method to tackle 3D open-vocabulary panoptic segmentation. Our model takes advantage of the fusion between learnable LiDAR features and dense frozen vision CLIP features, using a single classification head to make predictions for both base and novel classes. To further improve the classification performance on novel classes and leverage the CLIP model, we propose two novel loss functions: object-level distillation loss and voxel-level distillation loss. Our experiments on the nuScenes and SemanticKITTI datasets show that our method outperforms strong baselines by a large margin.
Gaussian3Diff: 3D Gaussian Diffusion for 3D Full Head Synthesis and Editing
Dec 19, 2023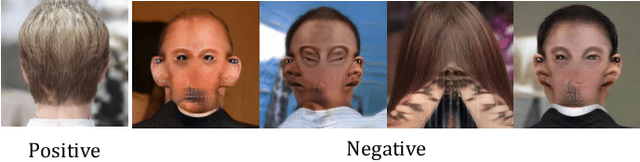
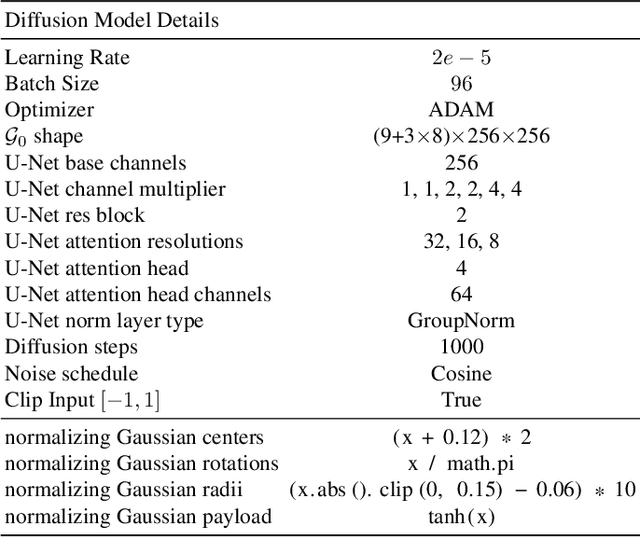
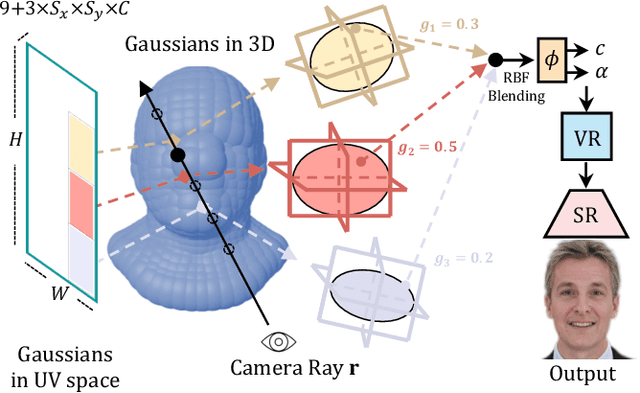
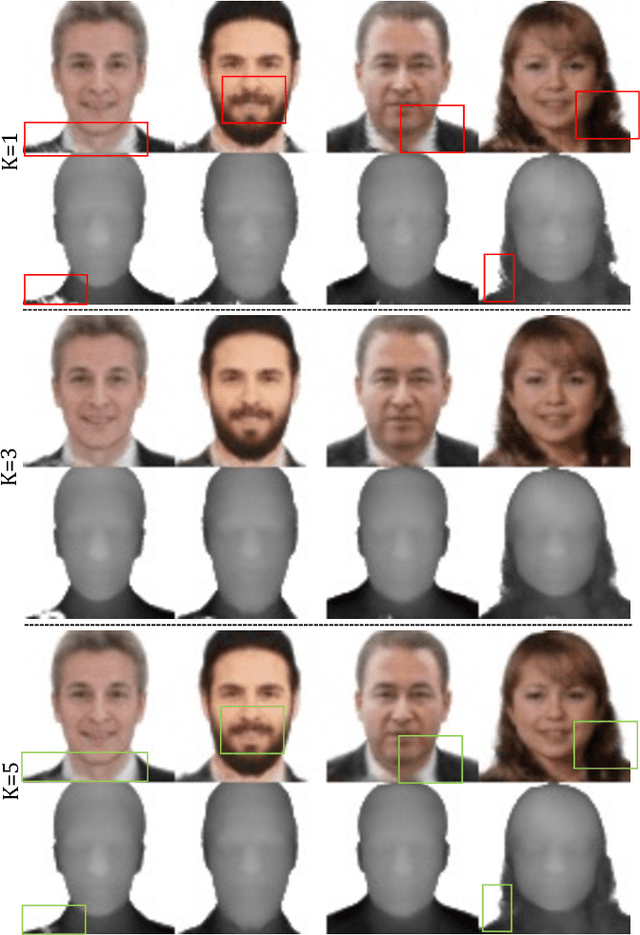
We present a novel framework for generating photorealistic 3D human head and subsequently manipulating and reposing them with remarkable flexibility. The proposed approach leverages an implicit function representation of 3D human heads, employing 3D Gaussians anchored on a parametric face model. To enhance representational capabilities and encode spatial information, we embed a lightweight tri-plane payload within each Gaussian rather than directly storing color and opacity. Additionally, we parameterize the Gaussians in a 2D UV space via a 3DMM, enabling effective utilization of the diffusion model for 3D head avatar generation. Our method facilitates the creation of diverse and realistic 3D human heads with fine-grained editing over facial features and expressions. Extensive experiments demonstrate the effectiveness of our method.
TidyBot: Personalized Robot Assistance with Large Language Models
May 09, 2023For a robot to personalize physical assistance effectively, it must learn user preferences that can be generally reapplied to future scenarios. In this work, we investigate personalization of household cleanup with robots that can tidy up rooms by picking up objects and putting them away. A key challenge is determining the proper place to put each object, as people's preferences can vary greatly depending on personal taste or cultural background. For instance, one person may prefer storing shirts in the drawer, while another may prefer them on the shelf. We aim to build systems that can learn such preferences from just a handful of examples via prior interactions with a particular person. We show that robots can combine language-based planning and perception with the few-shot summarization capabilities of large language models (LLMs) to infer generalized user preferences that are broadly applicable to future interactions. This approach enables fast adaptation and achieves 91.2% accuracy on unseen objects in our benchmark dataset. We also demonstrate our approach on a real-world mobile manipulator called TidyBot, which successfully puts away 85.0% of objects in real-world test scenarios.
Clutter Detection and Removal in 3D Scenes with View-Consistent Inpainting
Apr 07, 2023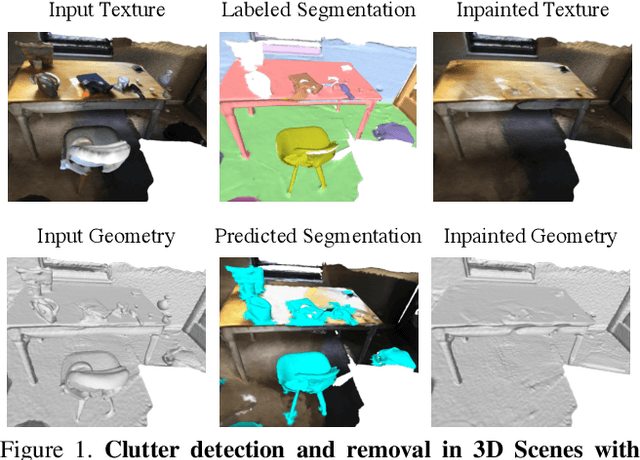
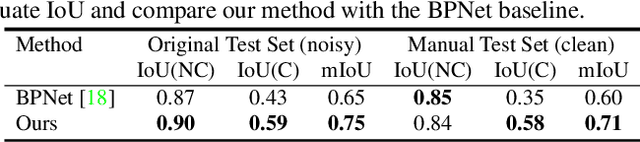
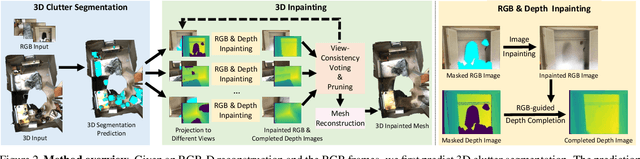
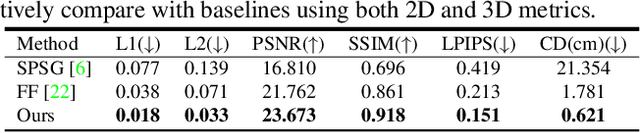
Removing clutter from scenes is essential in many applications, ranging from privacy-concerned content filtering to data augmentation. In this work, we present an automatic system that removes clutter from 3D scenes and inpaints with coherent geometry and texture. We propose techniques for its two key components: 3D segmentation from shared properties and 3D inpainting, both of which are important porblems. The definition of 3D scene clutter (frequently-moving objects) is not well captured by commonly-studied object categories in computer vision. To tackle the lack of well-defined clutter annotations, we group noisy fine-grained labels, leverage virtual rendering, and impose an instance-level area-sensitive loss. Once clutter is removed, we inpaint geometry and texture in the resulting holes by merging inpainted RGB-D images. This requires novel voting and pruning strategies that guarantee multi-view consistency across individually inpainted images for mesh reconstruction. Experiments on ScanNet and Matterport dataset show that our method outperforms baselines for clutter segmentation and 3D inpainting, both visually and quantitatively.
Learning Object-Centric Neural Scattering Functions for Free-viewpoint Relighting and Scene Composition
Mar 10, 2023



Photorealistic object appearance modeling from 2D images is a constant topic in vision and graphics. While neural implicit methods (such as Neural Radiance Fields) have shown high-fidelity view synthesis results, they cannot relight the captured objects. More recent neural inverse rendering approaches have enabled object relighting, but they represent surface properties as simple BRDFs, and therefore cannot handle translucent objects. We propose Object-Centric Neural Scattering Functions (OSFs) for learning to reconstruct object appearance from only images. OSFs not only support free-viewpoint object relighting, but also can model both opaque and translucent objects. While accurately modeling subsurface light transport for translucent objects can be highly complex and even intractable for neural methods, OSFs learn to approximate the radiance transfer from a distant light to an outgoing direction at any spatial location. This approximation avoids explicitly modeling complex subsurface scattering, making learning a neural implicit model tractable. Experiments on real and synthetic data show that OSFs accurately reconstruct appearances for both opaque and translucent objects, allowing faithful free-viewpoint relighting as well as scene composition.
Nerflets: Local Radiance Fields for Efficient Structure-Aware 3D Scene Representation from 2D Supervision
Mar 10, 2023We address efficient and structure-aware 3D scene representation from images. Nerflets are our key contribution -- a set of local neural radiance fields that together represent a scene. Each nerflet maintains its own spatial position, orientation, and extent, within which it contributes to panoptic, density, and radiance reconstructions. By leveraging only photometric and inferred panoptic image supervision, we can directly and jointly optimize the parameters of a set of nerflets so as to form a decomposed representation of the scene, where each object instance is represented by a group of nerflets. During experiments with indoor and outdoor environments, we find that nerflets: (1) fit and approximate the scene more efficiently than traditional global NeRFs, (2) allow the extraction of panoptic and photometric renderings from arbitrary views, and (3) enable tasks rare for NeRFs, such as 3D panoptic segmentation and interactive editing.
Polynomial Neural Fields for Subband Decomposition and Manipulation
Feb 09, 2023



Neural fields have emerged as a new paradigm for representing signals, thanks to their ability to do it compactly while being easy to optimize. In most applications, however, neural fields are treated like black boxes, which precludes many signal manipulation tasks. In this paper, we propose a new class of neural fields called polynomial neural fields (PNFs). The key advantage of a PNF is that it can represent a signal as a composition of a number of manipulable and interpretable components without losing the merits of neural fields representation. We develop a general theoretical framework to analyze and design PNFs. We use this framework to design Fourier PNFs, which match state-of-the-art performance in signal representation tasks that use neural fields. In addition, we empirically demonstrate that Fourier PNFs enable signal manipulation applications such as texture transfer and scale-space interpolation. Code is available at https://github.com/stevenygd/PNF.