 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeENPIRE: Agentic Robot Policy Self-Improvement in the Real World
Jun 18, 2026Achieving dexterous robotic manipulation in the real world heavily relies on human supervision and algorithm engineering, which becomes a central bottleneck in the pursuit of general physical intelligence. Although emerging coding agents can generate code to automate algorithm search, their successes remain largely confined in digital environments. We conjecture that the missing abstraction to automate robotics research is a repeatable feedback loop for real-world policy improvement: reset the scene, execute a policy, verify the outcome, and refine the next iteration. To bridge this gap, we introduce ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with one or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes. This closed-loop system transforms real-world manipulation learning into a controllable optimization procedure, minimizing human effort while allowing fair ablations across training recipe and agent variants. Powered by ENPIRE, frontier coding agents can autonomously train a policy to achieve a 99% success rate on challenging, dexterous manipulation tasks, such as organizing a pin box, fastening a zip tie, and tool use, a process that further accelerates when we dispatch an agent team on a robot fleet. Our results suggest a practical and scalable path toward deploying coding agents to autonomously advancing robotics in the physical world.
KinDER: A Physical Reasoning Benchmark for Robot Learning and Planning
Apr 28, 2026Robotic systems that interact with the physical world must reason about kinematic and dynamic constraints imposed by their own embodiment, their environment, and the task at hand. We introduce KinDER, a benchmark for Kinematic and Dynamic Embodied Reasoning that targets physical reasoning challenges arising in robot learning and planning. KinDER comprises 25 procedurally generated environments, a Gymnasium-compatible Python library with parameterized skills and demonstrations, and a standardized evaluation suite with 13 implemented baselines spanning task and motion planning, imitation learning, reinforcement learning, and foundation-model-based approaches. The environments are designed to isolate five core physical reasoning challenges: basic spatial relations, nonprehensile multi-object manipulation, tool use, combinatorial geometric constraints, and dynamic constraints, disentangled from perception, language understanding, and application-specific complexity. Empirical evaluation shows that existing methods struggle to solve many of the environments, indicating substantial gaps in current approaches to physical reasoning. We additionally include real-to-sim-to-real experiments on a mobile manipulator to assess the correspondence between simulation and real-world physical interaction. KinDER is fully open-sourced and intended to enable systematic comparison across diverse paradigms for advancing physical reasoning in robotics. Website and code: https://prpl-group.com/kinder-site/
World Action Models are Zero-shot Policies
Feb 17, 2026State-of-the-art Vision-Language-Action (VLA) models excel at semantic generalization but struggle to generalize to unseen physical motions in novel environments. We introduce DreamZero, a World Action Model (WAM) built upon a pretrained video diffusion backbone. Unlike VLAs, WAMs learn physical dynamics by predicting future world states and actions, using video as a dense representation of how the world evolves. By jointly modeling video and action, DreamZero learns diverse skills effectively from heterogeneous robot data without relying on repetitive demonstrations. This results in over 2x improvement in generalization to new tasks and environments compared to state-of-the-art VLAs in real robot experiments. Crucially, through model and system optimizations, we enable a 14B autoregressive video diffusion model to perform real-time closed-loop control at 7Hz. Finally, we demonstrate two forms of cross-embodiment transfer: video-only demonstrations from other robots or humans yield a relative improvement of over 42% on unseen task performance with just 10-20 minutes of data. More surprisingly, DreamZero enables few-shot embodiment adaptation, transferring to a new embodiment with only 30 minutes of play data while retaining zero-shot generalization.
Constraint-Preserving Data Generation for Visuomotor Policy Learning
Aug 05, 2025



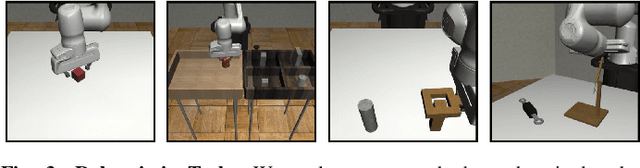
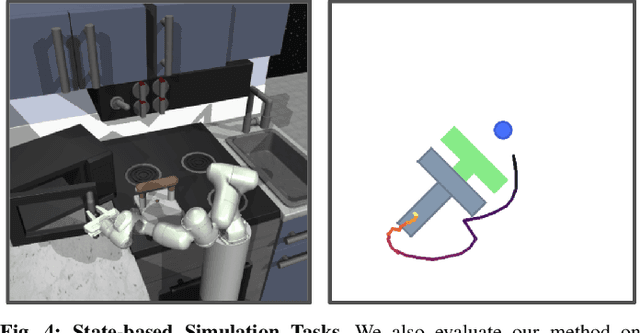
Large-scale demonstration data has powered key breakthroughs in robot manipulation, but collecting that data remains costly and time-consuming. We present Constraint-Preserving Data Generation (CP-Gen), a method that uses a single expert trajectory to generate robot demonstrations containing novel object geometries and poses. These generated demonstrations are used to train closed-loop visuomotor policies that transfer zero-shot to the real world and generalize across variations in object geometries and poses. Similar to prior work using pose variations for data generation, CP-Gen first decomposes expert demonstrations into free-space motions and robot skills. But unlike those works, we achieve geometry-aware data generation by formulating robot skills as keypoint-trajectory constraints: keypoints on the robot or grasped object must track a reference trajectory defined relative to a task-relevant object. To generate a new demonstration, CP-Gen samples pose and geometry transforms for each task-relevant object, then applies these transforms to the object and its associated keypoints or keypoint trajectories. We optimize robot joint configurations so that the keypoints on the robot or grasped object track the transformed keypoint trajectory, and then motion plan a collision-free path to the first optimized joint configuration. Experiments on 16 simulation tasks and four real-world tasks, featuring multi-stage, non-prehensile and tight-tolerance manipulation, show that policies trained using CP-Gen achieve an average success rate of 77%, outperforming the best baseline that achieves an average of 50%.
Vision in Action: Learning Active Perception from Human Demonstrations
Jun 18, 2025We present Vision in Action (ViA), an active perception system for bimanual robot manipulation. ViA learns task-relevant active perceptual strategies (e.g., searching, tracking, and focusing) directly from human demonstrations. On the hardware side, ViA employs a simple yet effective 6-DoF robotic neck to enable flexible, human-like head movements. To capture human active perception strategies, we design a VR-based teleoperation interface that creates a shared observation space between the robot and the human operator. To mitigate VR motion sickness caused by latency in the robot's physical movements, the interface uses an intermediate 3D scene representation, enabling real-time view rendering on the operator side while asynchronously updating the scene with the robot's latest observations. Together, these design elements enable the learning of robust visuomotor policies for three complex, multi-stage bimanual manipulation tasks involving visual occlusions, significantly outperforming baseline systems.
TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
Dec 11, 2024
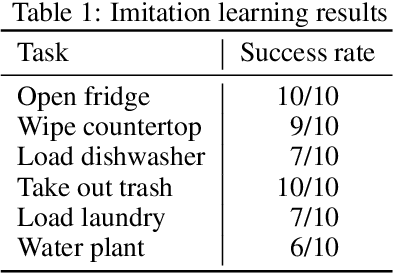

Exploiting the promise of recent advances in imitation learning for mobile manipulation will require the collection of large numbers of human-guided demonstrations. This paper proposes an open-source design for an inexpensive, robust, and flexible mobile manipulator that can support arbitrary arms, enabling a wide range of real-world household mobile manipulation tasks. Crucially, our design uses powered casters to enable the mobile base to be fully holonomic, able to control all planar degrees of freedom independently and simultaneously. This feature makes the base more maneuverable and simplifies many mobile manipulation tasks, eliminating the kinematic constraints that create complex and time-consuming motions in nonholonomic bases. We equip our robot with an intuitive mobile phone teleoperation interface to enable easy data acquisition for imitation learning. In our experiments, we use this interface to collect data and show that the resulting learned policies can successfully perform a variety of common household mobile manipulation tasks.
Points2Plans: From Point Clouds to Long-Horizon Plans with Composable Relational Dynamics
Aug 27, 2024We present Points2Plans, a framework for composable planning with a relational dynamics model that enables robots to solve long-horizon manipulation tasks from partial-view point clouds. Given a language instruction and a point cloud of the scene, our framework initiates a hierarchical planning procedure, whereby a language model generates a high-level plan and a sampling-based planner produces constraint-satisfying continuous parameters for manipulation primitives sequenced according to the high-level plan. Key to our approach is the use of a relational dynamics model as a unifying interface between the continuous and symbolic representations of states and actions, thus facilitating language-driven planning from high-dimensional perceptual input such as point clouds. Whereas previous relational dynamics models require training on datasets of multi-step manipulation scenarios that align with the intended test scenarios, Points2Plans uses only single-step simulated training data while generalizing zero-shot to a variable number of steps during real-world evaluations. We evaluate our approach on tasks involving geometric reasoning, multi-object interactions, and occluded object reasoning in both simulated and real-world settings. Results demonstrate that Points2Plans offers strong generalization to unseen long-horizon tasks in the real world, where it solves over 85% of evaluated tasks while the next best baseline solves only 50%. Qualitative demonstrations of our approach operating on a mobile manipulator platform are made available at sites.google.com/stanford.edu/points2plans.
Consistency Policy: Accelerated Visuomotor Policies via Consistency Distillation
May 13, 2024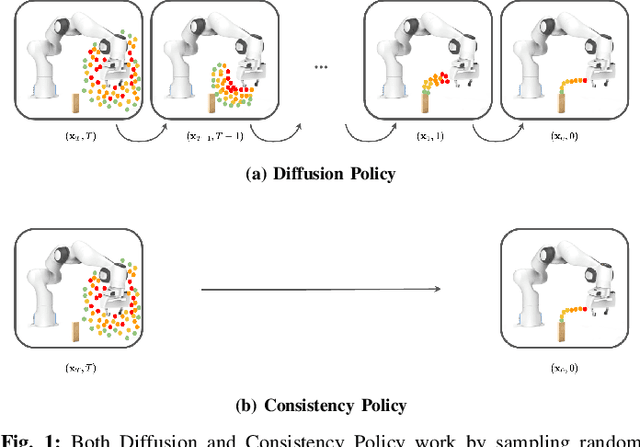
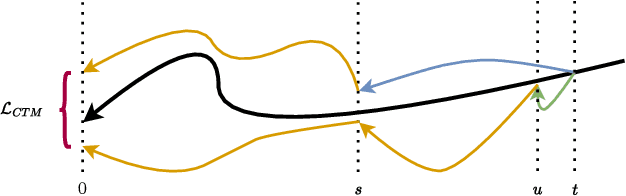
Many robotic systems, such as mobile manipulators or quadrotors, cannot be equipped with high-end GPUs due to space, weight, and power constraints. These constraints prevent these systems from leveraging recent developments in visuomotor policy architectures that require high-end GPUs to achieve fast policy inference. In this paper, we propose Consistency Policy, a faster and similarly powerful alternative to Diffusion Policy for learning visuomotor robot control. By virtue of its fast inference speed, Consistency Policy can enable low latency decision making in resource-constrained robotic setups. A Consistency Policy is distilled from a pretrained Diffusion Policy by enforcing self-consistency along the Diffusion Policy's learned trajectories. We compare Consistency Policy with Diffusion Policy and other related speed-up methods across 6 simulation tasks as well as two real-world tasks where we demonstrate inference on a laptop GPU. For all these tasks, Consistency Policy speeds up inference by an order of magnitude compared to the fastest alternative method and maintains competitive success rates. We also show that the Conistency Policy training procedure is robust to the pretrained Diffusion Policy's quality, a useful result that helps practioners avoid extensive testing of the pretrained model. Key design decisions that enabled this performance are the choice of consistency objective, reduced initial sample variance, and the choice of preset chaining steps. Code and training details will be released publicly.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
EquivAct: SIM(3)-Equivariant Visuomotor Policies beyond Rigid Object Manipulation
Oct 24, 2023If a robot masters folding a kitchen towel, we would also expect it to master folding a beach towel. However, existing works for policy learning that rely on data set augmentations are still limited in achieving this level of generalization. Our insight is to add equivariance to both the visual object representation and policy architecture. We propose EquivAct which utilizes SIM(3)-equivariant network structures that guarantee generalization across all possible object translations, 3D rotations, and scales by construction. Training of EquivAct is done in two phases. We first pre-train a SIM(3)-equivariant visual representation on simulated scene point clouds. Then, we learn a SIM(3)-equivariant visuomotor policy on top of the pre-trained visual representation using a small amount of source task demonstrations. We demonstrate that after training, the learned policy directly transfers to objects that substantially differ in scale, position and orientation from the source demonstrations. In simulation, we evaluate our method in three manipulation tasks involving deformable and articulated objects thereby going beyond the typical rigid object manipulation tasks that prior works considered. We show that our method outperforms prior works that do not use equivariant architectures or do not use our contrastive pre-training procedure. We also show quantitative and qualitative experiments on three real robot tasks, where the robot watches twenty demonstrations of a tabletop task and transfers zero-shot to a mobile manipulation task in a much larger setup. Project website: https://equivact.github.io