 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD2RL: Deep Dense Architectures in Reinforcement Learning
Paper and Code
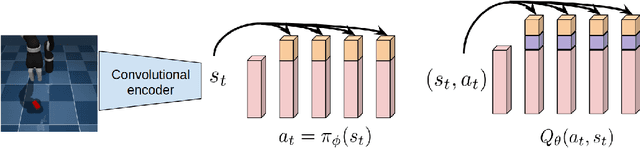
While improvements in deep learning architectures have played a crucial role in improving the state of supervised and unsupervised learning in computer vision and natural language processing, neural network architecture choices for reinforcement learning remain relatively under-explored. We take inspiration from successful architectural choices in computer vision and generative modelling, and investigate the use of deeper networks and dense connections for reinforcement learning on a variety of simulated robotic learning benchmark environments. Our findings reveal that current methods benefit significantly from dense connections and deeper networks, across a suite of manipulation and locomotion tasks, for both proprioceptive and image-based observations. We hope that our results can serve as a strong baseline and further motivate future research into neural network architectures for reinforcement learning. The project website with code is at this link https://sites.google.com/view/d2rl/home.