 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Vision-Language Models as a Source of Rewards
Dec 14, 2023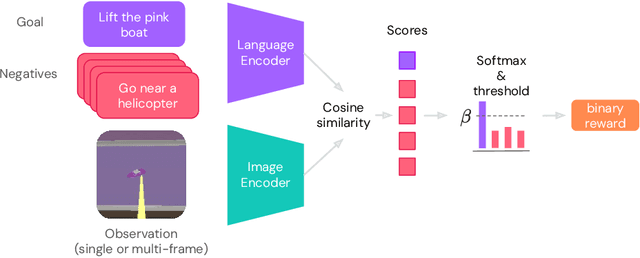
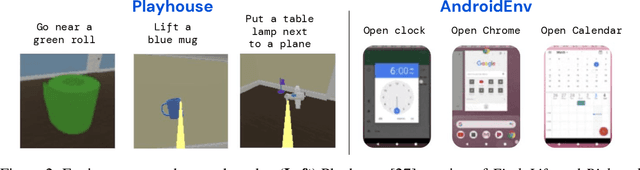
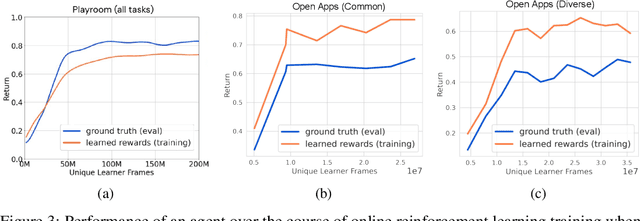
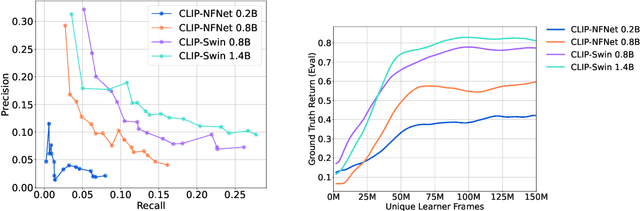
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
Human-Timescale Adaptation in an Open-Ended Task Space
Jan 18, 2023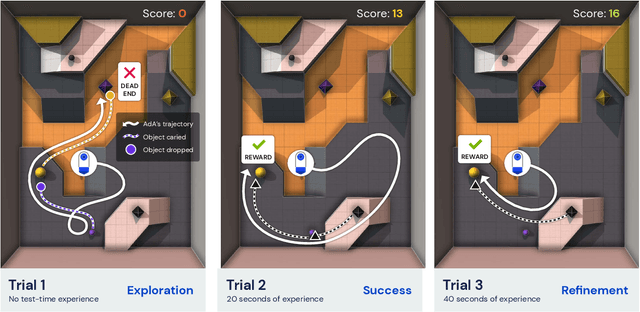
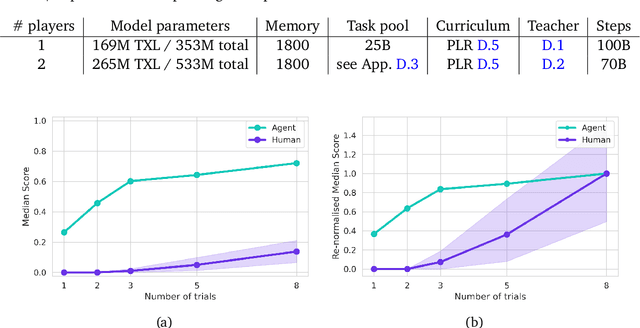
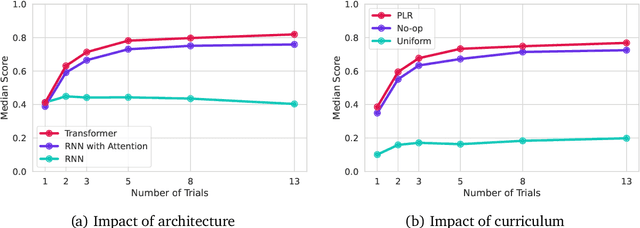
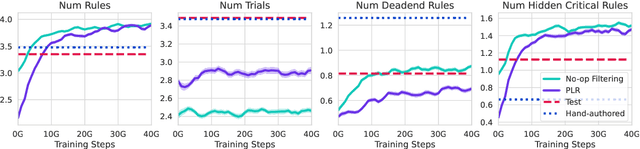
Foundation models have shown impressive adaptation and scalability in supervised and self-supervised learning problems, but so far these successes have not fully translated to reinforcement learning (RL). In this work, we demonstrate that training an RL agent at scale leads to a general in-context learning algorithm that can adapt to open-ended novel embodied 3D problems as quickly as humans. In a vast space of held-out environment dynamics, our adaptive agent (AdA) displays on-the-fly hypothesis-driven exploration, efficient exploitation of acquired knowledge, and can successfully be prompted with first-person demonstrations. Adaptation emerges from three ingredients: (1) meta-reinforcement learning across a vast, smooth and diverse task distribution, (2) a policy parameterised as a large-scale attention-based memory architecture, and (3) an effective automated curriculum that prioritises tasks at the frontier of an agent's capabilities. We demonstrate characteristic scaling laws with respect to network size, memory length, and richness of the training task distribution. We believe our results lay the foundation for increasingly general and adaptive RL agents that perform well across ever-larger open-ended domains.
Discovering Policies with DOMiNO: Diversity Optimization Maintaining Near Optimality
May 26, 2022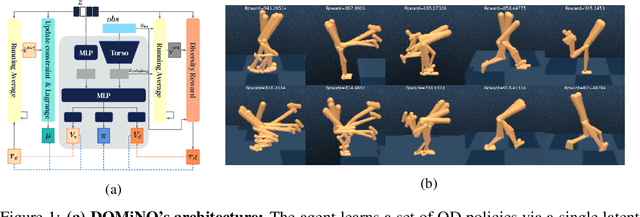
Finding different solutions to the same problem is a key aspect of intelligence associated with creativity and adaptation to novel situations. In reinforcement learning, a set of diverse policies can be useful for exploration, transfer, hierarchy, and robustness. We propose DOMiNO, a method for Diversity Optimization Maintaining Near Optimality. We formalize the problem as a Constrained Markov Decision Process where the objective is to find diverse policies, measured by the distance between the state occupancies of the policies in the set, while remaining near-optimal with respect to the extrinsic reward. We demonstrate that the method can discover diverse and meaningful behaviors in various domains, such as different locomotion patterns in the DeepMind Control Suite. We perform extensive analysis of our approach, compare it with other multi-objective baselines, demonstrate that we can control both the quality and the diversity of the set via interpretable hyperparameters, and show that the discovered set is robust to perturbations.
Self-Consistent Models and Values
Oct 25, 2021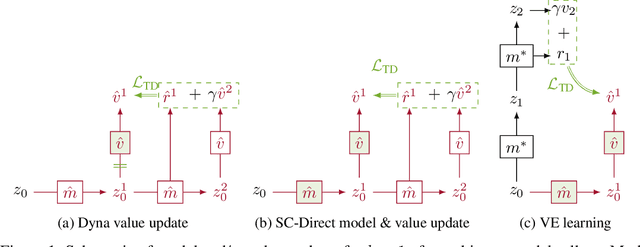
Learned models of the environment provide reinforcement learning (RL) agents with flexible ways of making predictions about the environment. In particular, models enable planning, i.e. using more computation to improve value functions or policies, without requiring additional environment interactions. In this work, we investigate a way of augmenting model-based RL, by additionally encouraging a learned model and value function to be jointly \emph{self-consistent}. Our approach differs from classic planning methods such as Dyna, which only update values to be consistent with the model. We propose multiple self-consistency updates, evaluate these in both tabular and function approximation settings, and find that, with appropriate choices, self-consistency helps both policy evaluation and control.
Learning more skills through optimistic exploration
Jul 29, 2021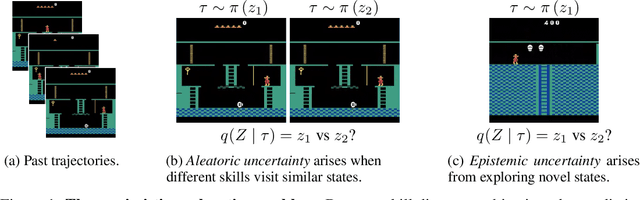
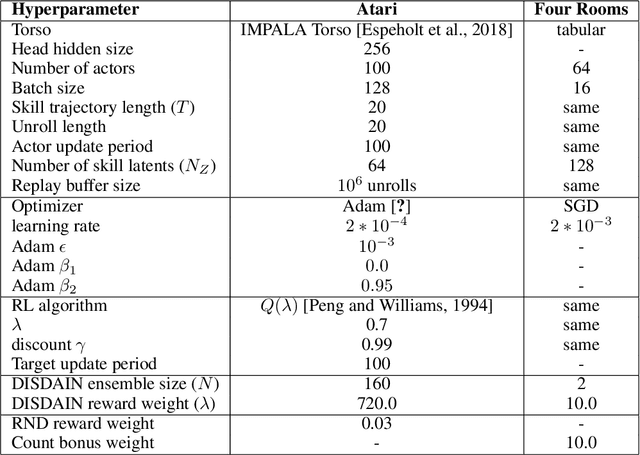


Unsupervised skill learning objectives (Gregor et al., 2016, Eysenbach et al., 2018) allow agents to learn rich repertoires of behavior in the absence of extrinsic rewards. They work by simultaneously training a policy to produce distinguishable latent-conditioned trajectories, and a discriminator to evaluate distinguishability by trying to infer latents from trajectories. The hope is for the agent to explore and master the environment by encouraging each skill (latent) to reliably reach different states. However, an inherent exploration problem lingers: when a novel state is actually encountered, the discriminator will necessarily not have seen enough training data to produce accurate and confident skill classifications, leading to low intrinsic reward for the agent and effective penalization of the sort of exploration needed to actually maximize the objective. To combat this inherent pessimism towards exploration, we derive an information gain auxiliary objective that involves training an ensemble of discriminators and rewarding the policy for their disagreement. Our objective directly estimates the epistemic uncertainty that comes from the discriminator not having seen enough training examples, thus providing an intrinsic reward more tailored to the true objective compared to pseudocount-based methods (Burda et al., 2019). We call this exploration bonus discriminator disagreement intrinsic reward, or DISDAIN. We demonstrate empirically that DISDAIN improves skill learning both in a tabular grid world (Four Rooms) and the 57 games of the Atari Suite (from pixels). Thus, we encourage researchers to treat pessimism with DISDAIN.
Relative Variational Intrinsic Control
Dec 14, 2020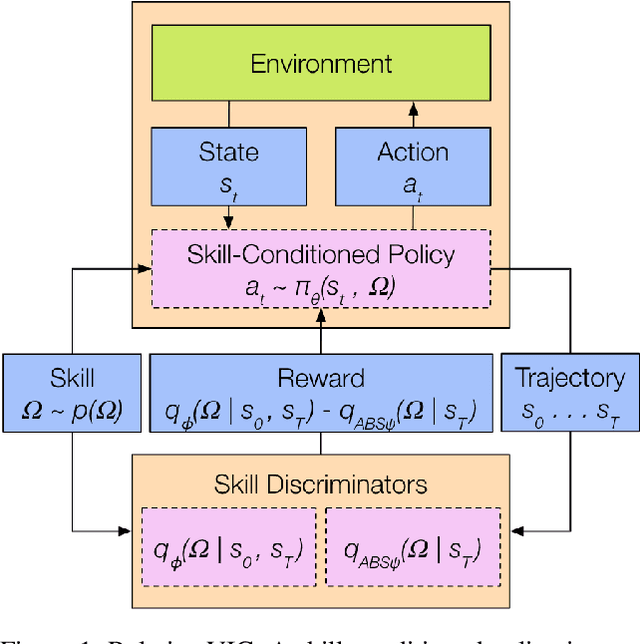
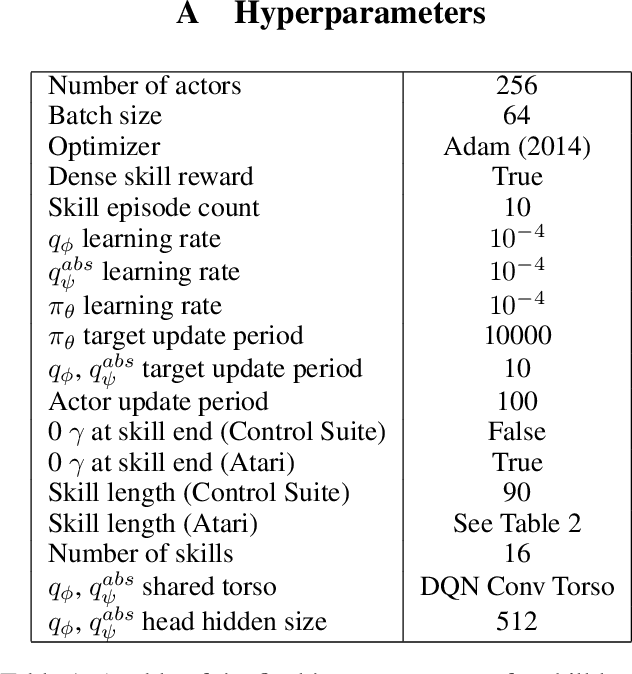
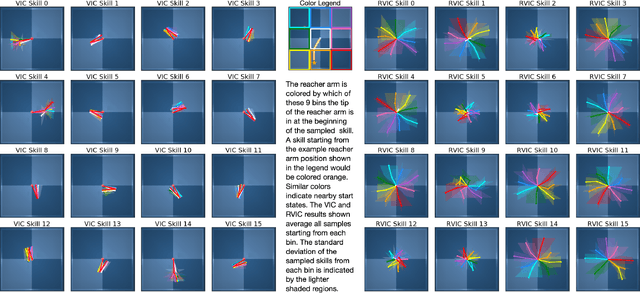
In the absence of external rewards, agents can still learn useful behaviors by identifying and mastering a set of diverse skills within their environment. Existing skill learning methods use mutual information objectives to incentivize each skill to be diverse and distinguishable from the rest. However, if care is not taken to constrain the ways in which the skills are diverse, trivially diverse skill sets can arise. To ensure useful skill diversity, we propose a novel skill learning objective, Relative Variational Intrinsic Control (RVIC), which incentivizes learning skills that are distinguishable in how they change the agent's relationship to its environment. The resulting set of skills tiles the space of affordances available to the agent. We qualitatively analyze skill behaviors on multiple environments and show how RVIC skills are more useful than skills discovered by existing methods when used in hierarchical reinforcement learning.
Acme: A Research Framework for Distributed Reinforcement Learning
Jun 01, 2020
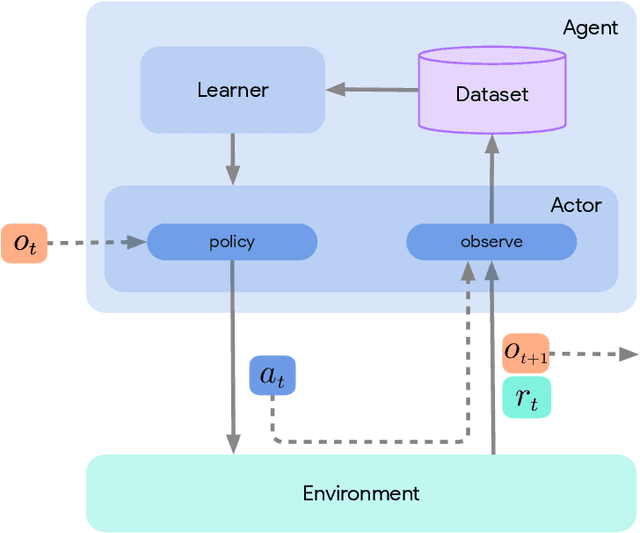
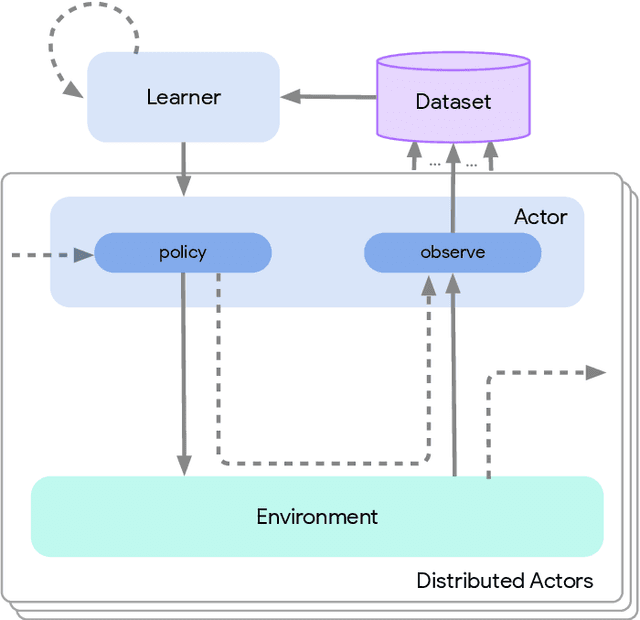
Deep reinforcement learning has led to many recent-and groundbreaking-advancements. However, these advances have often come at the cost of both the scale and complexity of the underlying RL algorithms. Increases in complexity have in turn made it more difficult for researchers to reproduce published RL algorithms or rapidly prototype ideas. To address this, we introduce Acme, a tool to simplify the development of novel RL algorithms that is specifically designed to enable simple agent implementations that can be run at various scales of execution. Our aim is also to make the results of various RL algorithms developed in academia and industrial labs easier to reproduce and extend. To this end we are releasing baseline implementations of various algorithms, created using our framework. In this work we introduce the major design decisions behind Acme and show how these are used to construct these baselines. We also experiment with these agents at different scales of both complexity and computation-including distributed versions. Ultimately, we show that the design decisions behind Acme lead to agents that can be scaled both up and down and that, for the most part, greater levels of parallelization result in agents with equivalent performance, just faster.