 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProc4Gem: Foundation models for physical agency through procedural generation
Mar 11, 2025



In robot learning, it is common to either ignore the environment semantics, focusing on tasks like whole-body control which only require reasoning about robot-environment contacts, or conversely to ignore contact dynamics, focusing on grounding high-level movement in vision and language. In this work, we show that advances in generative modeling, photorealistic rendering, and procedural generation allow us to tackle tasks requiring both. By generating contact-rich trajectories with accurate physics in semantically-diverse simulations, we can distill behaviors into large multimodal models that directly transfer to the real world: a system we call Proc4Gem. Specifically, we show that a foundation model, Gemini, fine-tuned on only simulation data, can be instructed in language to control a quadruped robot to push an object with its body to unseen targets in unseen real-world environments. Our real-world results demonstrate the promise of using simulation to imbue foundation models with physical agency. Videos can be found at our website: https://sites.google.com/view/proc4gem
Human-Timescale Adaptation in an Open-Ended Task Space
Jan 18, 2023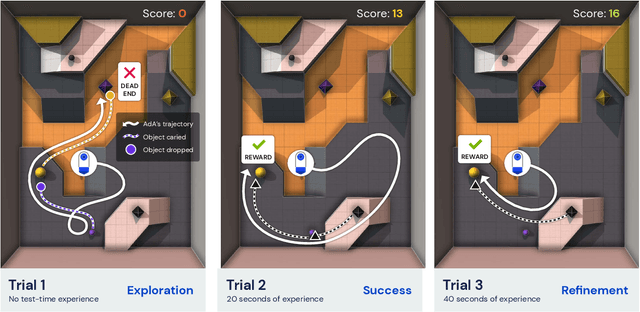
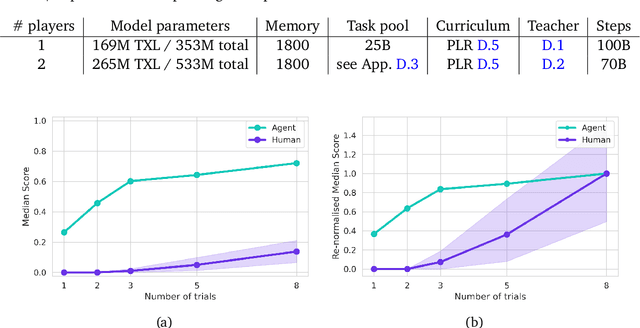
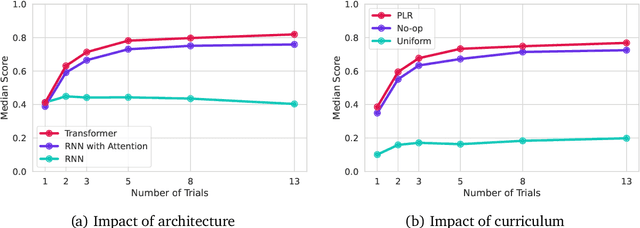
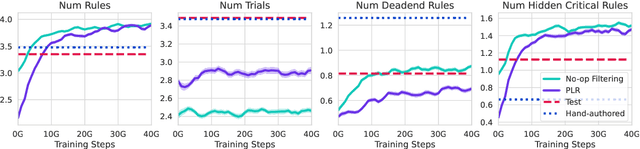
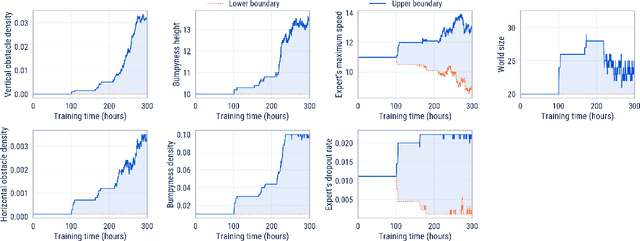
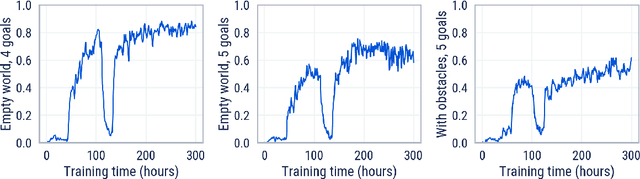
Foundation models have shown impressive adaptation and scalability in supervised and self-supervised learning problems, but so far these successes have not fully translated to reinforcement learning (RL). In this work, we demonstrate that training an RL agent at scale leads to a general in-context learning algorithm that can adapt to open-ended novel embodied 3D problems as quickly as humans. In a vast space of held-out environment dynamics, our adaptive agent (AdA) displays on-the-fly hypothesis-driven exploration, efficient exploitation of acquired knowledge, and can successfully be prompted with first-person demonstrations. Adaptation emerges from three ingredients: (1) meta-reinforcement learning across a vast, smooth and diverse task distribution, (2) a policy parameterised as a large-scale attention-based memory architecture, and (3) an effective automated curriculum that prioritises tasks at the frontier of an agent's capabilities. We demonstrate characteristic scaling laws with respect to network size, memory length, and richness of the training task distribution. We believe our results lay the foundation for increasingly general and adaptive RL agents that perform well across ever-larger open-ended domains.
Learning Robust Real-Time Cultural Transmission without Human Data
Mar 01, 2022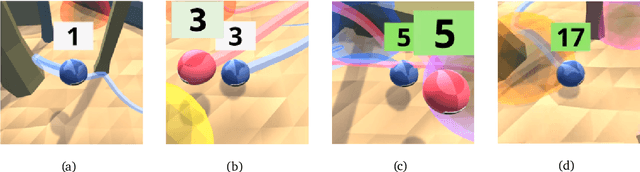
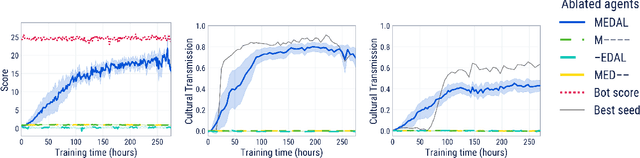
Cultural transmission is the domain-general social skill that allows agents to acquire and use information from each other in real-time with high fidelity and recall. In humans, it is the inheritance process that powers cumulative cultural evolution, expanding our skills, tools and knowledge across generations. We provide a method for generating zero-shot, high recall cultural transmission in artificially intelligent agents. Our agents succeed at real-time cultural transmission from humans in novel contexts without using any pre-collected human data. We identify a surprisingly simple set of ingredients sufficient for generating cultural transmission and develop an evaluation methodology for rigorously assessing it. This paves the way for cultural evolution as an algorithm for developing artificial general intelligence.