 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExoStart: Efficient learning for dexterous manipulation with sensorized exoskeleton demonstrations
Jun 13, 2025



Recent advancements in teleoperation systems have enabled high-quality data collection for robotic manipulators, showing impressive results in learning manipulation at scale. This progress suggests that extending these capabilities to robotic hands could unlock an even broader range of manipulation skills, especially if we could achieve the same level of dexterity that human hands exhibit. However, teleoperating robotic hands is far from a solved problem, as it presents a significant challenge due to the high degrees of freedom of robotic hands and the complex dynamics occurring during contact-rich settings. In this work, we present ExoStart, a general and scalable learning framework that leverages human dexterity to improve robotic hand control. In particular, we obtain high-quality data by collecting direct demonstrations without a robot in the loop using a sensorized low-cost wearable exoskeleton, capturing the rich behaviors that humans can demonstrate with their own hands. We also propose a simulation-based dynamics filter that generates dynamically feasible trajectories from the collected demonstrations and use the generated trajectories to bootstrap an auto-curriculum reinforcement learning method that relies only on simple sparse rewards. The ExoStart pipeline is generalizable and yields robust policies that transfer zero-shot to the real robot. Our results demonstrate that ExoStart can generate dexterous real-world hand skills, achieving a success rate above 50% on a wide range of complex tasks such as opening an AirPods case or inserting and turning a key in a lock. More details and videos can be found in https://sites.google.com/view/exostart.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Proc4Gem: Foundation models for physical agency through procedural generation
Mar 11, 2025



In robot learning, it is common to either ignore the environment semantics, focusing on tasks like whole-body control which only require reasoning about robot-environment contacts, or conversely to ignore contact dynamics, focusing on grounding high-level movement in vision and language. In this work, we show that advances in generative modeling, photorealistic rendering, and procedural generation allow us to tackle tasks requiring both. By generating contact-rich trajectories with accurate physics in semantically-diverse simulations, we can distill behaviors into large multimodal models that directly transfer to the real world: a system we call Proc4Gem. Specifically, we show that a foundation model, Gemini, fine-tuned on only simulation data, can be instructed in language to control a quadruped robot to push an object with its body to unseen targets in unseen real-world environments. Our real-world results demonstrate the promise of using simulation to imbue foundation models with physical agency. Videos can be found at our website: https://sites.google.com/view/proc4gem
Prosody for Intuitive Robotic Interface Design: It's Not What You Said, It's How You Said It
Mar 13, 2024

In this paper, we investigate the use of 'prosody' (the musical elements of speech) as a communicative signal for intuitive human-robot interaction interfaces. Our approach, rooted in Research through Design (RtD), examines the application of prosody in directing a quadruped robot navigation. We involved ten team members in an experiment to command a robot through an obstacle course using natural interaction. A human operator, serving as the robot's sensory and processing proxy, translated human communication into a basic set of navigation commands, effectively simulating an intuitive interface. During our analysis of interaction videos, when lexical and visual cues proved insufficient for accurate command interpretation, we turned to non-verbal auditory cues. Qualitative evidence suggests that participants intuitively relied on prosody to control robot navigation. We highlight specific distinct prosodic constructs that emerged from this preliminary exploration and discuss their pragmatic functions. This work contributes a discussion on the broader potential of prosody as a multifunctional communicative signal for designing future intuitive robotic interfaces, enabling lifelong learning and personalization in human-robot interaction.
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023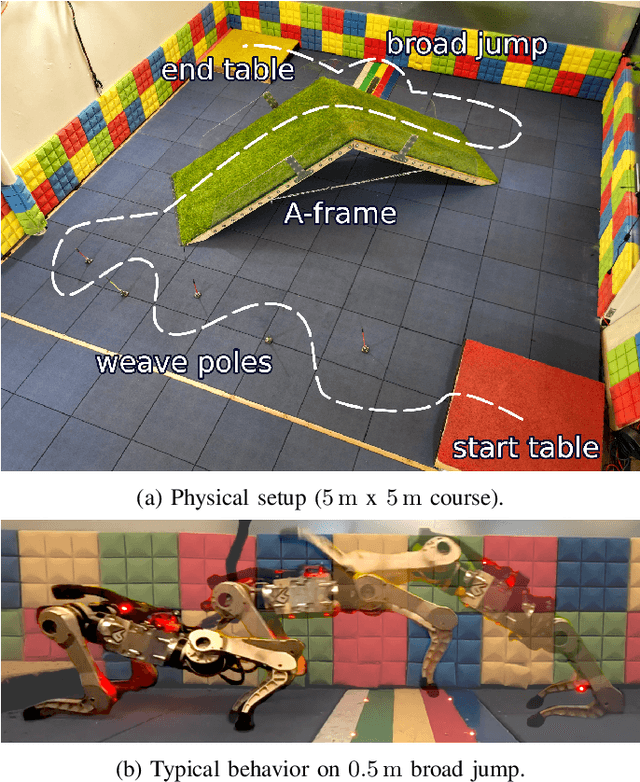
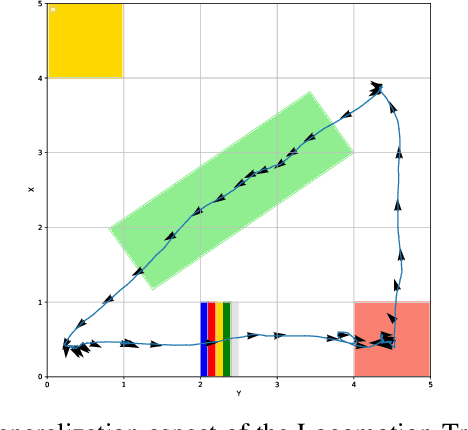
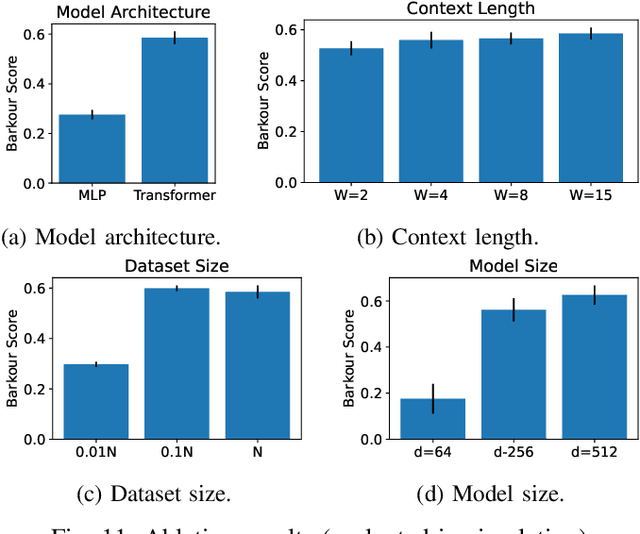
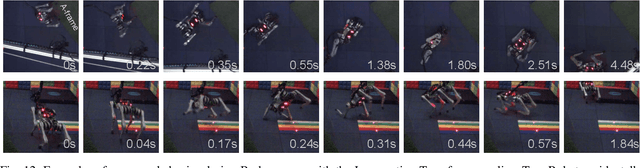
Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Apr 26, 2023We investigate whether Deep Reinforcement Learning (Deep RL) is able to synthesize sophisticated and safe movement skills for a low-cost, miniature humanoid robot that can be composed into complex behavioral strategies in dynamic environments. We used Deep RL to train a humanoid robot with 20 actuated joints to play a simplified one-versus-one (1v1) soccer game. We first trained individual skills in isolation and then composed those skills end-to-end in a self-play setting. The resulting policy exhibits robust and dynamic movement skills such as rapid fall recovery, walking, turning, kicking and more; and transitions between them in a smooth, stable, and efficient manner - well beyond what is intuitively expected from the robot. The agents also developed a basic strategic understanding of the game, and learned, for instance, to anticipate ball movements and to block opponent shots. The full range of behaviors emerged from a small set of simple rewards. Our agents were trained in simulation and transferred to real robots zero-shot. We found that a combination of sufficiently high-frequency control, targeted dynamics randomization, and perturbations during training in simulation enabled good-quality transfer, despite significant unmodeled effects and variations across robot instances. Although the robots are inherently fragile, minor hardware modifications together with basic regularization of the behavior during training led the robots to learn safe and effective movements while still performing in a dynamic and agile way. Indeed, even though the agents were optimized for scoring, in experiments they walked 156% faster, took 63% less time to get up, and kicked 24% faster than a scripted baseline, while efficiently combining the skills to achieve the longer term objectives. Examples of the emergent behaviors and full 1v1 matches are available on the supplementary website.
Beyond Pick-and-Place: Tackling Robotic Stacking of Diverse Shapes
Nov 03, 2021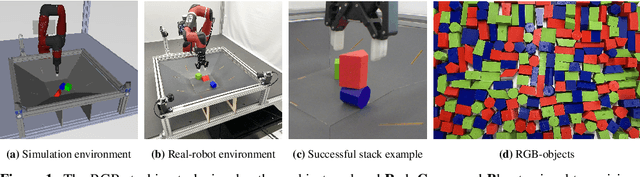
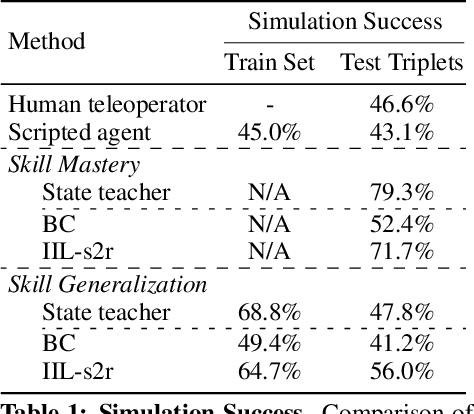
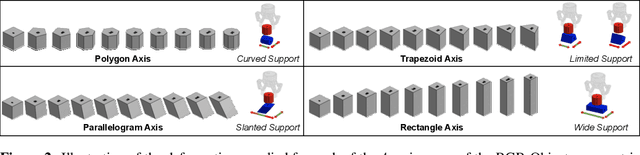
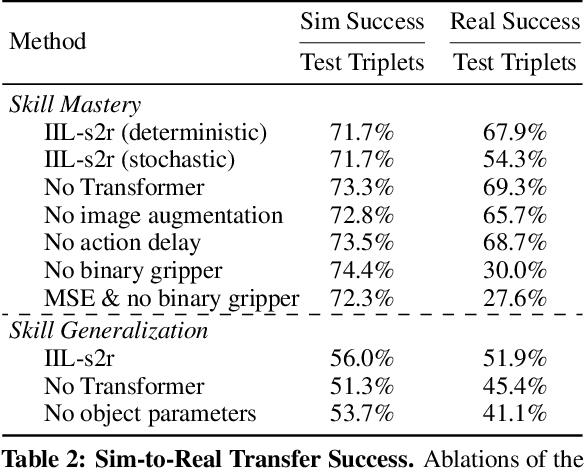
We study the problem of robotic stacking with objects of complex geometry. We propose a challenging and diverse set of such objects that was carefully designed to require strategies beyond a simple "pick-and-place" solution. Our method is a reinforcement learning (RL) approach combined with vision-based interactive policy distillation and simulation-to-reality transfer. Our learned policies can efficiently handle multiple object combinations in the real world and exhibit a large variety of stacking skills. In a large experimental study, we investigate what choices matter for learning such general vision-based agents in simulation, and what affects optimal transfer to the real robot. We then leverage data collected by such policies and improve upon them with offline RL. A video and a blog post of our work are provided as supplementary material.
Computer-Aided Design as Language
May 06, 2021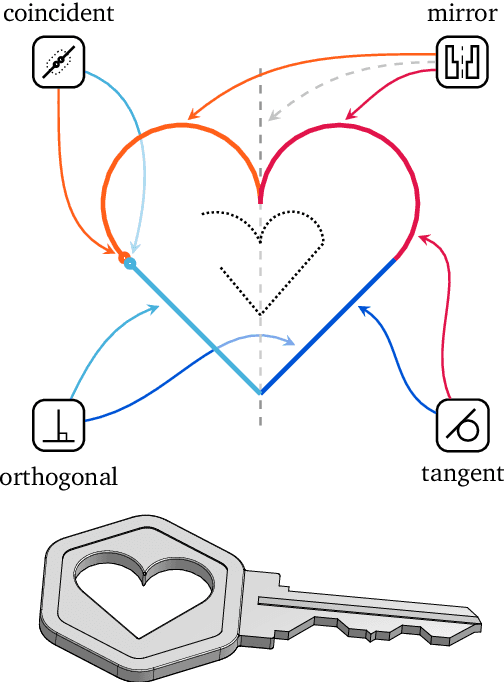
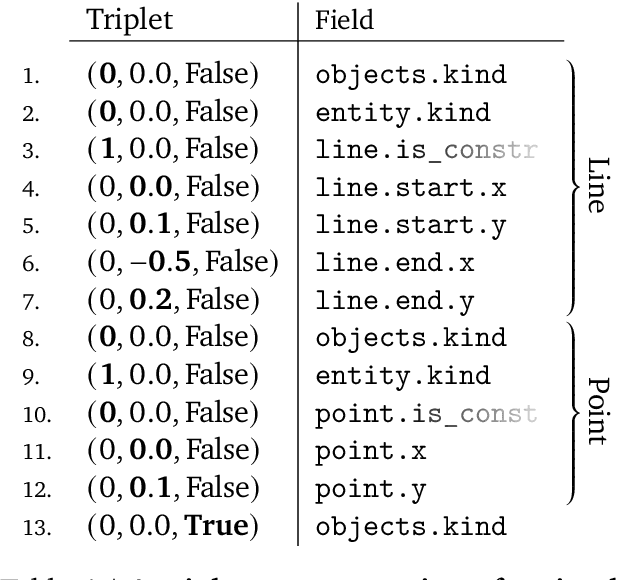
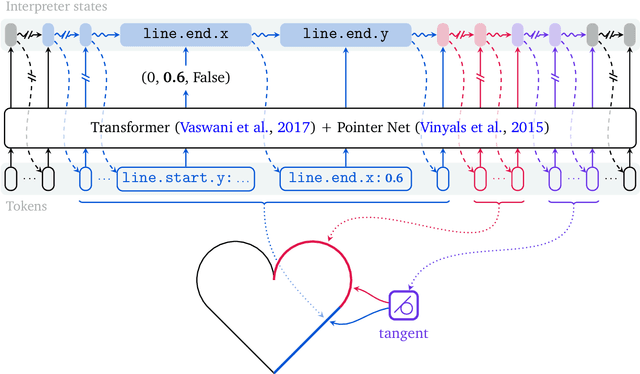
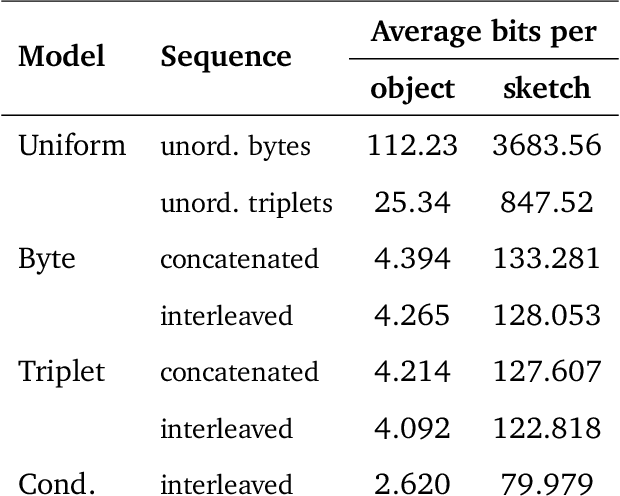
Computer-Aided Design (CAD) applications are used in manufacturing to model everything from coffee mugs to sports cars. These programs are complex and require years of training and experience to master. A component of all CAD models particularly difficult to make are the highly structured 2D sketches that lie at the heart of every 3D construction. In this work, we propose a machine learning model capable of automatically generating such sketches. Through this, we pave the way for developing intelligent tools that would help engineers create better designs with less effort. Our method is a combination of a general-purpose language modeling technique alongside an off-the-shelf data serialization protocol. We show that our approach has enough flexibility to accommodate the complexity of the domain and performs well for both unconditional synthesis and image-to-sketch translation.