 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning more skills through optimistic exploration
Paper and Code
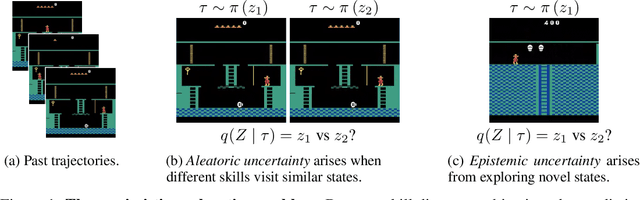


Unsupervised skill learning objectives (Gregor et al., 2016, Eysenbach et al., 2018) allow agents to learn rich repertoires of behavior in the absence of extrinsic rewards. They work by simultaneously training a policy to produce distinguishable latent-conditioned trajectories, and a discriminator to evaluate distinguishability by trying to infer latents from trajectories. The hope is for the agent to explore and master the environment by encouraging each skill (latent) to reliably reach different states. However, an inherent exploration problem lingers: when a novel state is actually encountered, the discriminator will necessarily not have seen enough training data to produce accurate and confident skill classifications, leading to low intrinsic reward for the agent and effective penalization of the sort of exploration needed to actually maximize the objective. To combat this inherent pessimism towards exploration, we derive an information gain auxiliary objective that involves training an ensemble of discriminators and rewarding the policy for their disagreement. Our objective directly estimates the epistemic uncertainty that comes from the discriminator not having seen enough training examples, thus providing an intrinsic reward more tailored to the true objective compared to pseudocount-based methods (Burda et al., 2019). We call this exploration bonus discriminator disagreement intrinsic reward, or DISDAIN. We demonstrate empirically that DISDAIN improves skill learning both in a tabular grid world (Four Rooms) and the 57 games of the Atari Suite (from pixels). Thus, we encourage researchers to treat pessimism with DISDAIN.