 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling 4D Representations
Dec 19, 2024



Scaling has not yet been convincingly demonstrated for pure self-supervised learning from video. However, prior work has focused evaluations on semantic-related tasks $\unicode{x2013}$ action classification, ImageNet classification, etc. In this paper we focus on evaluating self-supervised learning on non-semantic vision tasks that are more spatial (3D) and temporal (+1D = 4D), such as camera pose estimation, point and object tracking, and depth estimation. We show that by learning from very large video datasets, masked auto-encoding (MAE) with transformer video models actually scales, consistently improving performance on these 4D tasks, as model size increases from 20M all the way to the largest by far reported self-supervised video model $\unicode{x2013}$ 22B parameters. Rigorous apples-to-apples comparison with many recent image and video models demonstrates the benefits of scaling 4D representations.
Neural Compression of Atmospheric States
Jul 16, 2024



Atmospheric states derived from reanalysis comprise a substantial portion of weather and climate simulation outputs. Many stakeholders -- such as researchers, policy makers, and insurers -- use this data to better understand the earth system and guide policy decisions. Atmospheric states have also received increased interest as machine learning approaches to weather prediction have shown promising results. A key issue for all audiences is that dense time series of these high-dimensional states comprise an enormous amount of data, precluding all but the most well resourced groups from accessing and using historical data and future projections. To address this problem, we propose a method for compressing atmospheric states using methods from the neural network literature, adapting spherical data to processing by conventional neural architectures through the use of the area-preserving HEALPix projection. We investigate two model classes for building neural compressors: the hyperprior model from the neural image compression literature and recent vector-quantised models. We show that both families of models satisfy the desiderata of small average error, a small number of high-error reconstructed pixels, faithful reproduction of extreme events such as hurricanes and heatwaves, preservation of the spectral power distribution across spatial scales. We demonstrate compression ratios in excess of 1000x, with compression and decompression at a rate of approximately one second per global atmospheric state.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
AlignSDF: Pose-Aligned Signed Distance Fields for Hand-Object Reconstruction
Jul 26, 2022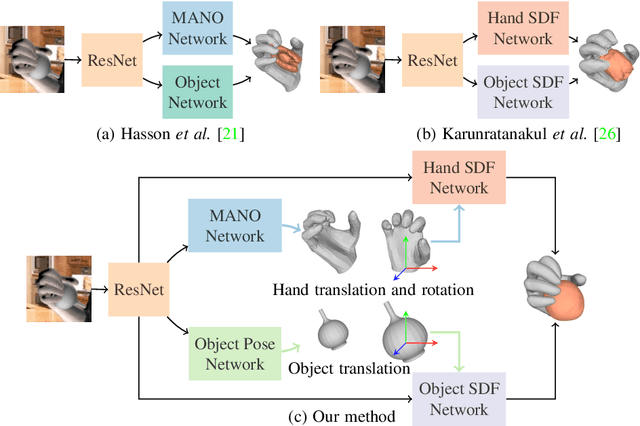
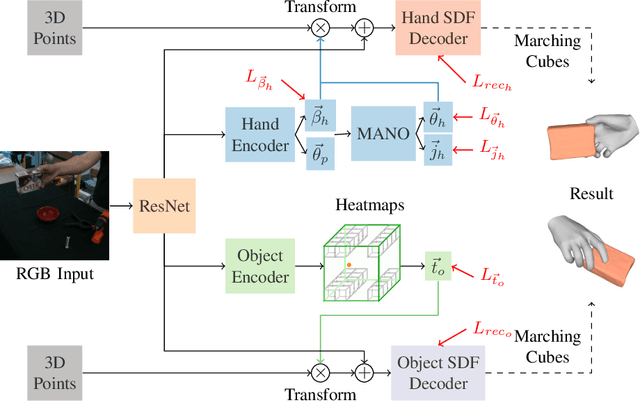
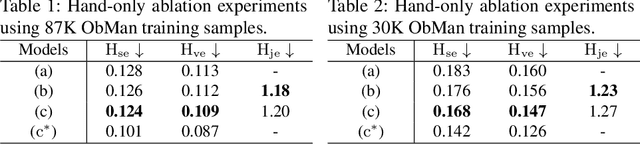
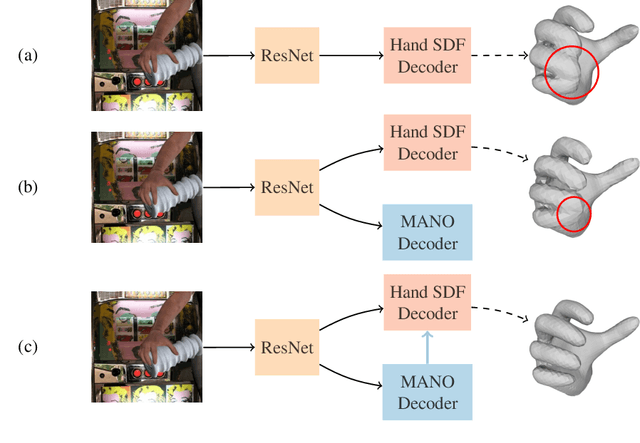
Recent work achieved impressive progress towards joint reconstruction of hands and manipulated objects from monocular color images. Existing methods focus on two alternative representations in terms of either parametric meshes or signed distance fields (SDFs). On one side, parametric models can benefit from prior knowledge at the cost of limited shape deformations and mesh resolutions. Mesh models, hence, may fail to precisely reconstruct details such as contact surfaces of hands and objects. SDF-based methods, on the other side, can represent arbitrary details but are lacking explicit priors. In this work we aim to improve SDF models using priors provided by parametric representations. In particular, we propose a joint learning framework that disentangles the pose and the shape. We obtain hand and object poses from parametric models and use them to align SDFs in 3D space. We show that such aligned SDFs better focus on reconstructing shape details and improve reconstruction accuracy both for hands and objects. We evaluate our method and demonstrate significant improvements over the state of the art on the challenging ObMan and DexYCB benchmarks.
Flamingo: a Visual Language Model for Few-Shot Learning
Apr 29, 2022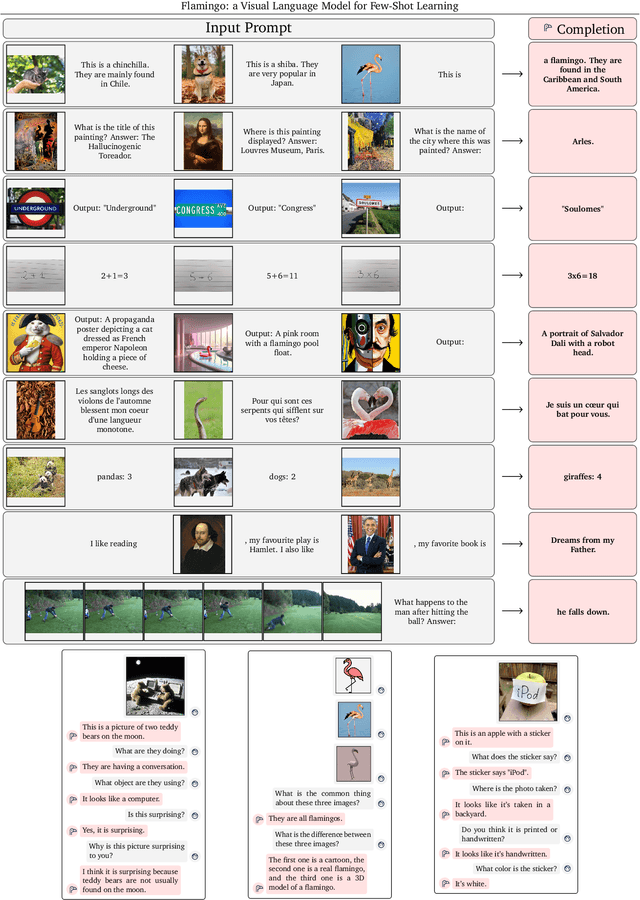
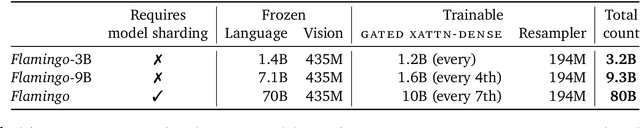
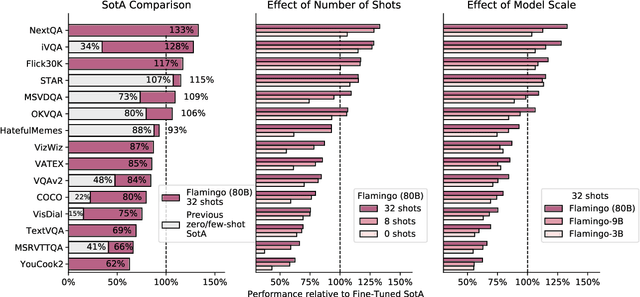
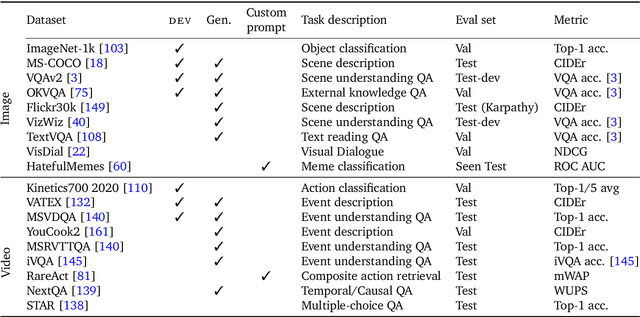
Building models that can be rapidly adapted to numerous tasks using only a handful of annotated examples is an open challenge for multimodal machine learning research. We introduce Flamingo, a family of Visual Language Models (VLM) with this ability. Flamingo models include key architectural innovations to: (i) bridge powerful pretrained vision-only and language-only models, (ii) handle sequences of arbitrarily interleaved visual and textual data, and (iii) seamlessly ingest images or videos as inputs. Thanks to their flexibility, Flamingo models can be trained on large-scale multimodal web corpora containing arbitrarily interleaved text and images, which is key to endow them with in-context few-shot learning capabilities. We perform a thorough evaluation of the proposed Flamingo models, exploring and measuring their ability to rapidly adapt to a variety of image and video understanding benchmarks. These include open-ended tasks such as visual question-answering, where the model is prompted with a question which it has to answer, captioning tasks, which evaluate the ability to describe a scene or an event, and close-ended tasks such as multiple choice visual question-answering. For tasks lying anywhere on this spectrum, we demonstrate that a single Flamingo model can achieve a new state of the art for few-shot learning, simply by prompting the model with task-specific examples. On many of these benchmarks, Flamingo actually surpasses the performance of models that are fine-tuned on thousands of times more task-specific data.
Towards unconstrained joint hand-object reconstruction from RGB videos
Aug 16, 2021
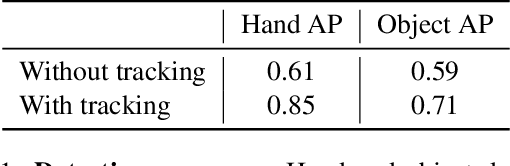
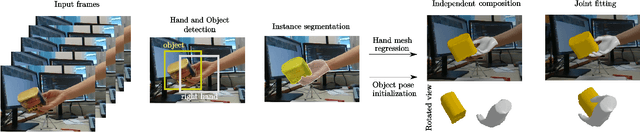

Our work aims to obtain 3D reconstruction of hands and manipulated objects from monocular videos. Reconstructing hand-object manipulations holds a great potential for robotics and learning from human demonstrations. The supervised learning approach to this problem, however, requires 3D supervision and remains limited to constrained laboratory settings and simulators for which 3D ground truth is available. In this paper we first propose a learning-free fitting approach for hand-object reconstruction which can seamlessly handle two-hand object interactions. Our method relies on cues obtained with common methods for object detection, hand pose estimation and instance segmentation. We quantitatively evaluate our approach and show that it can be applied to datasets with varying levels of difficulty for which training data is unavailable.
Low Bandwidth Video-Chat Compression using Deep Generative Models
Dec 01, 2020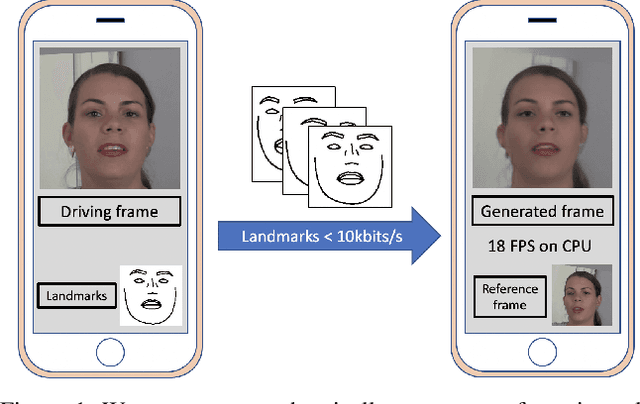

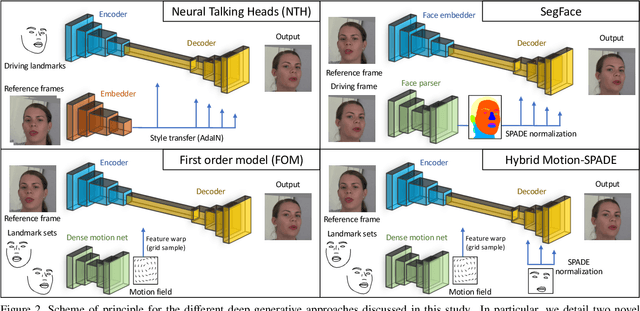

To unlock video chat for hundreds of millions of people hindered by poor connectivity or unaffordable data costs, we propose to authentically reconstruct faces on the receiver's device using facial landmarks extracted at the sender's side and transmitted over the network. In this context, we discuss and evaluate the benefits and disadvantages of several deep adversarial approaches. In particular, we explore quality and bandwidth trade-offs for approaches based on static landmarks, dynamic landmarks or segmentation maps. We design a mobile-compatible architecture based on the first order animation model of Siarohin et al. In addition, we leverage SPADE blocks to refine results in important areas such as the eyes and lips. We compress the networks down to about 3MB, allowing models to run in real time on iPhone 8 (CPU). This approach enables video calling at a few kbits per second, an order of magnitude lower than currently available alternatives.
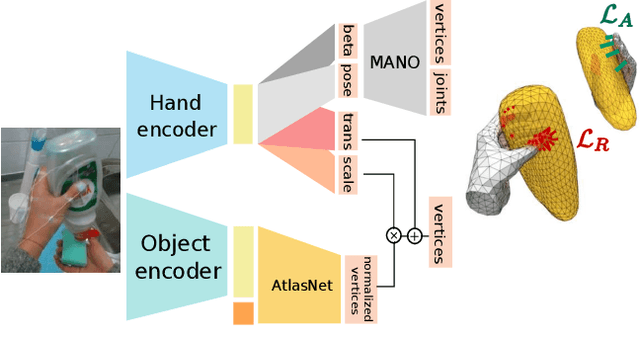
Leveraging Photometric Consistency over Time for Sparsely Supervised Hand-Object Reconstruction
Apr 28, 2020

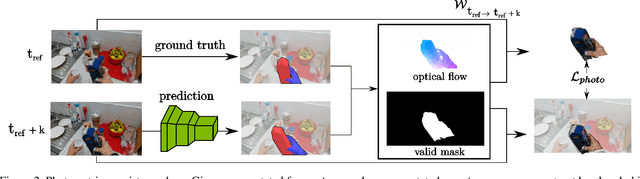

Modeling hand-object manipulations is essential for understanding how humans interact with their environment. While of practical importance, estimating the pose of hands and objects during interactions is challenging due to the large mutual occlusions that occur during manipulation. Recent efforts have been directed towards fully-supervised methods that require large amounts of labeled training samples. Collecting 3D ground-truth data for hand-object interactions, however, is costly, tedious, and error-prone. To overcome this challenge we present a method to leverage photometric consistency across time when annotations are only available for a sparse subset of frames in a video. Our model is trained end-to-end on color images to jointly reconstruct hands and objects in 3D by inferring their poses. Given our estimated reconstructions, we differentiably render the optical flow between pairs of adjacent images and use it within the network to warp one frame to another. We then apply a self-supervised photometric loss that relies on the visual consistency between nearby images. We achieve state-of-the-art results on 3D hand-object reconstruction benchmarks and demonstrate that our approach allows us to improve the pose estimation accuracy by leveraging information from neighboring frames in low-data regimes.
Learning joint reconstruction of hands and manipulated objects
Apr 11, 2019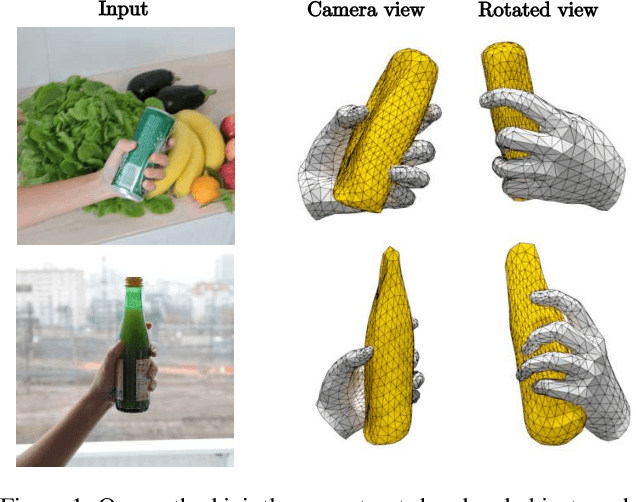

Estimating hand-object manipulations is essential for interpreting and imitating human actions. Previous work has made significant progress towards reconstruction of hand poses and object shapes in isolation. Yet, reconstructing hands and objects during manipulation is a more challenging task due to significant occlusions of both the hand and object. While presenting challenges, manipulations may also simplify the problem since the physics of contact restricts the space of valid hand-object configurations. For example, during manipulation, the hand and object should be in contact but not interpenetrate. In this work, we regularize the joint reconstruction of hands and objects with manipulation constraints. We present an end-to-end learnable model that exploits a novel contact loss that favors physically plausible hand-object constellations. Our approach improves grasp quality metrics over baselines, using RGB images as input. To train and evaluate the model, we also propose a new large-scale synthetic dataset, ObMan, with hand-object manipulations. We demonstrate the transferability of ObMan-trained models to real data.