 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Set Block Decoding is a Language Model Inference Accelerator
Sep 04, 2025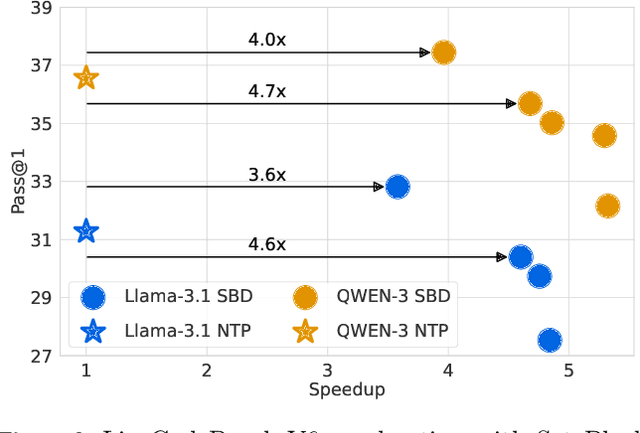
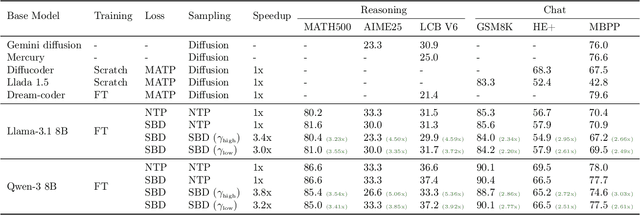
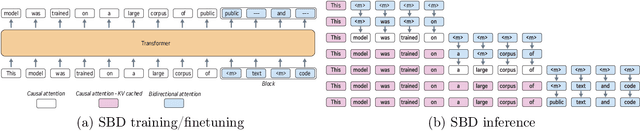

Autoregressive next token prediction language models offer powerful capabilities but face significant challenges in practical deployment due to the high computational and memory costs of inference, particularly during the decoding stage. We introduce Set Block Decoding (SBD), a simple and flexible paradigm that accelerates generation by integrating standard next token prediction (NTP) and masked token prediction (MATP) within a single architecture. SBD allows the model to sample multiple, not necessarily consecutive, future tokens in parallel, a key distinction from previous acceleration methods. This flexibility allows the use of advanced solvers from the discrete diffusion literature, offering significant speedups without sacrificing accuracy. SBD requires no architectural changes or extra training hyperparameters, maintains compatibility with exact KV-caching, and can be implemented by fine-tuning existing next token prediction models. By fine-tuning Llama-3.1 8B and Qwen-3 8B, we demonstrate that SBD enables a 3-5x reduction in the number of forward passes required for generation while achieving same performance as equivalent NTP training.
DINOv3
Aug 13, 2025Self-supervised learning holds the promise of eliminating the need for manual data annotation, enabling models to scale effortlessly to massive datasets and larger architectures. By not being tailored to specific tasks or domains, this training paradigm has the potential to learn visual representations from diverse sources, ranging from natural to aerial images -- using a single algorithm. This technical report introduces DINOv3, a major milestone toward realizing this vision by leveraging simple yet effective strategies. First, we leverage the benefit of scaling both dataset and model size by careful data preparation, design, and optimization. Second, we introduce a new method called Gram anchoring, which effectively addresses the known yet unsolved issue of dense feature maps degrading during long training schedules. Finally, we apply post-hoc strategies that further enhance our models' flexibility with respect to resolution, model size, and alignment with text. As a result, we present a versatile vision foundation model that outperforms the specialized state of the art across a broad range of settings, without fine-tuning. DINOv3 produces high-quality dense features that achieve outstanding performance on various vision tasks, significantly surpassing previous self- and weakly-supervised foundation models. We also share the DINOv3 suite of vision models, designed to advance the state of the art on a wide spectrum of tasks and data by providing scalable solutions for diverse resource constraints and deployment scenarios.
Efficient Speculative Decoding for Llama at Scale: Challenges and Solutions
Aug 11, 2025Speculative decoding is a standard method for accelerating the inference speed of large language models. However, scaling it for production environments poses several engineering challenges, including efficiently implementing different operations (e.g., tree attention and multi-round speculative decoding) on GPU. In this paper, we detail the training and inference optimization techniques that we have implemented to enable EAGLE-based speculative decoding at a production scale for Llama models. With these changes, we achieve a new state-of-the-art inference latency for Llama models. For example, Llama4 Maverick decodes at a speed of about 4 ms per token (with a batch size of one) on 8 NVIDIA H100 GPUs, which is 10% faster than the previously best known method. Furthermore, for EAGLE-based speculative decoding, our optimizations enable us to achieve a speed-up for large batch sizes between 1.4x and 2.0x at production scale.
Accelerating Transformer Inference and Training with 2:4 Activation Sparsity
Mar 20, 2025



In this paper, we demonstrate how to leverage 2:4 sparsity, a popular hardware-accelerated GPU sparsity pattern, to activations to accelerate large language model training and inference. Crucially we exploit the intrinsic sparsity found in Squared-ReLU activations to provide this acceleration with no accuracy loss. Our approach achieves up to 1.3x faster Feed Forward Network (FFNs) in both the forwards and backwards pass. This work highlights the potential for sparsity to play a key role in accelerating large language model training and inference.
Memory Layers at Scale
Dec 12, 2024



Memory layers use a trainable key-value lookup mechanism to add extra parameters to a model without increasing FLOPs. Conceptually, sparsely activated memory layers complement compute-heavy dense feed-forward layers, providing dedicated capacity to store and retrieve information cheaply. This work takes memory layers beyond proof-of-concept, proving their utility at contemporary scale. On downstream tasks, language models augmented with our improved memory layer outperform dense models with more than twice the computation budget, as well as mixture-of-expert models when matched for both compute and parameters. We find gains are especially pronounced for factual tasks. We provide a fully parallelizable memory layer implementation, demonstrating scaling laws with up to 128B memory parameters, pretrained to 1 trillion tokens, comparing to base models with up to 8B parameters.
Sub-meter resolution canopy height maps using self-supervised learning and a vision transformer trained on Aerial and GEDI Lidar
Apr 17, 2023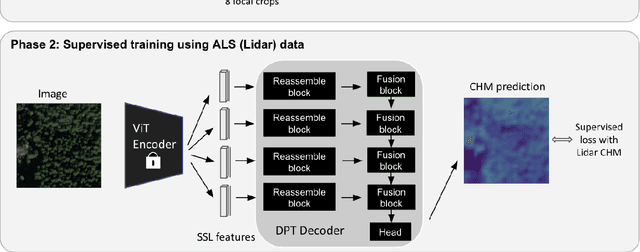
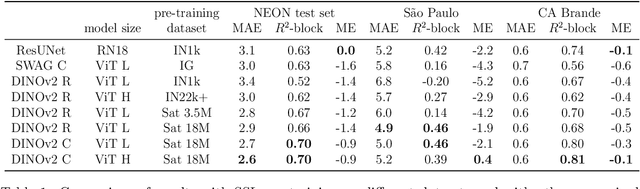
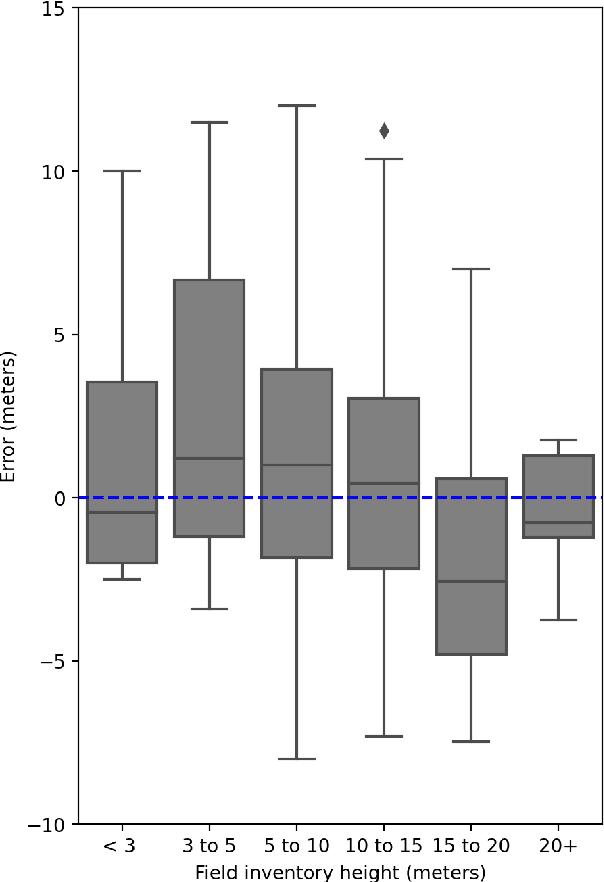
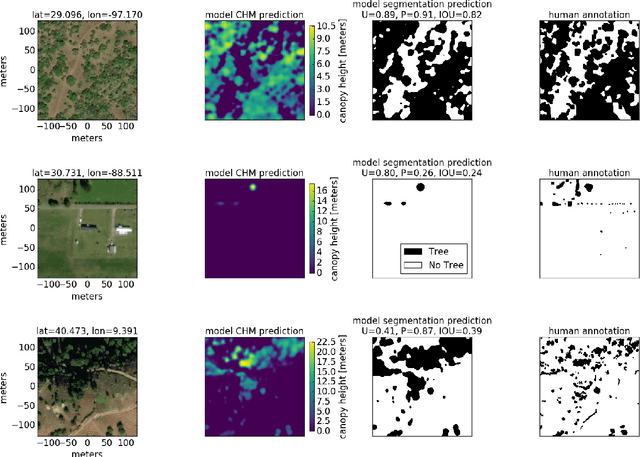
Vegetation structure mapping is critical for understanding the global carbon cycle and monitoring nature-based approaches to climate adaptation and mitigation. Repeat measurements of these data allow for the observation of deforestation or degradation of existing forests, natural forest regeneration, and the implementation of sustainable agricultural practices like agroforestry. Assessments of tree canopy height and crown projected area at a high spatial resolution are also important for monitoring carbon fluxes and assessing tree-based land uses, since forest structures can be highly spatially heterogeneous, especially in agroforestry systems. Very high resolution satellite imagery (less than one meter (1m) ground sample distance) makes it possible to extract information at the tree level while allowing monitoring at a very large scale. This paper presents the first high-resolution canopy height map concurrently produced for multiple sub-national jurisdictions. Specifically, we produce canopy height maps for the states of California and S\~{a}o Paolo, at sub-meter resolution, a significant improvement over the ten meter (10m) resolution of previous Sentinel / GEDI based worldwide maps of canopy height. The maps are generated by applying a vision transformer to features extracted from a self-supervised model in Maxar imagery from 2017 to 2020, and are trained against aerial lidar and GEDI observations. We evaluate the proposed maps with set-aside validation lidar data as well as by comparing with other remotely sensed maps and field-collected data, and find our model produces an average Mean Absolute Error (MAE) within set-aside validation areas of 3.0 meters.
DINOv2: Learning Robust Visual Features without Supervision
Apr 14, 2023
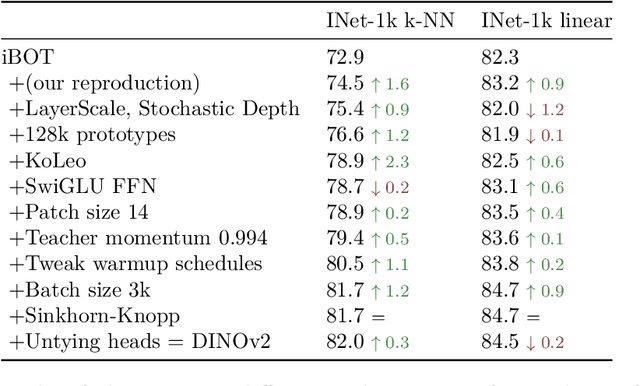
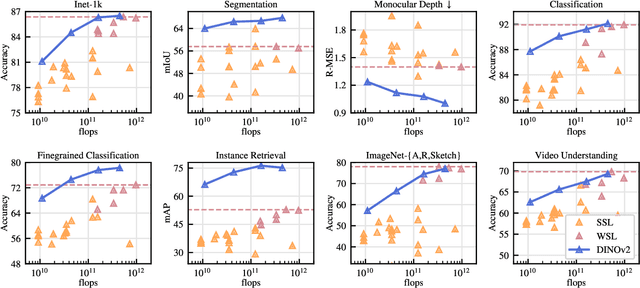
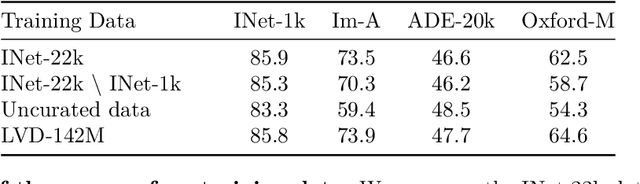
The recent breakthroughs in natural language processing for model pretraining on large quantities of data have opened the way for similar foundation models in computer vision. These models could greatly simplify the use of images in any system by producing all-purpose visual features, i.e., features that work across image distributions and tasks without finetuning. This work shows that existing pretraining methods, especially self-supervised methods, can produce such features if trained on enough curated data from diverse sources. We revisit existing approaches and combine different techniques to scale our pretraining in terms of data and model size. Most of the technical contributions aim at accelerating and stabilizing the training at scale. In terms of data, we propose an automatic pipeline to build a dedicated, diverse, and curated image dataset instead of uncurated data, as typically done in the self-supervised literature. In terms of models, we train a ViT model (Dosovitskiy et al., 2020) with 1B parameters and distill it into a series of smaller models that surpass the best available all-purpose features, OpenCLIP (Ilharco et al., 2021) on most of the benchmarks at image and pixel levels.
Efficient conditioned face animation using frontally-viewed embedding
Mar 16, 2022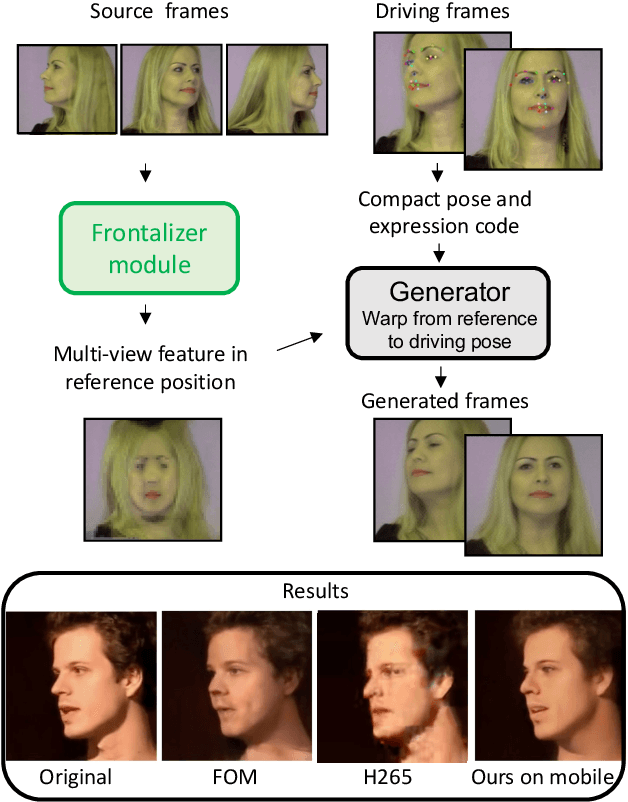

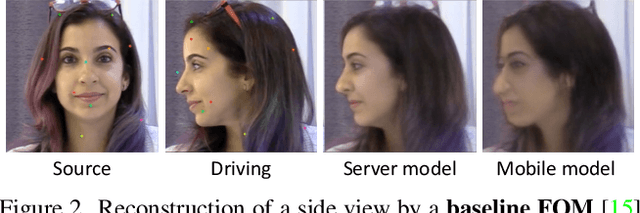
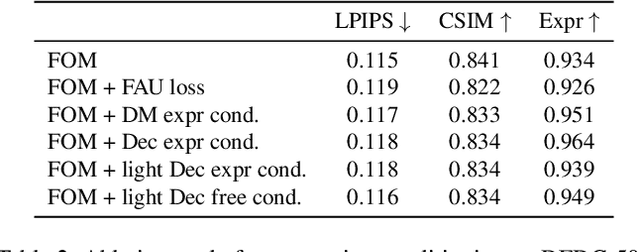
As the quality of few shot facial animation from landmarks increases, new applications become possible, such as ultra low bandwidth video chat compression with a high degree of realism. However, there are some important challenges to tackle in order to improve the experience in real world conditions. In particular, the current approaches fail to represent profile views without distortions, while running in a low compute regime. We focus on this key problem by introducing a multi-frames embedding dubbed Frontalizer to improve profile views rendering. In addition to this core improvement, we explore the learning of a latent code conditioning generations along with landmarks to better convey facial expressions. Our dense models achieves 22% of improvement in perceptual quality and 73% reduction of landmark error over the first order model baseline on a subset of DFDC videos containing head movements. Declined with mobile architectures, our models outperform the previous state-of-the-art (improving perceptual quality by more than 16% and reducing landmark error by more than 47% on two datasets) while running on real time on iPhone 8 with very low bandwidth requirements.
VoxPopuli: A Large-Scale Multilingual Speech Corpus for Representation Learning, Semi-Supervised Learning and Interpretation
Jan 02, 2021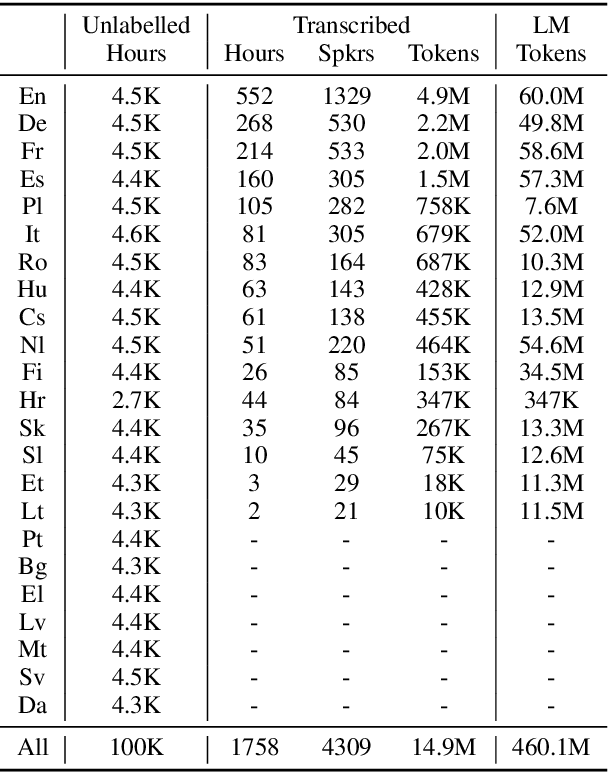
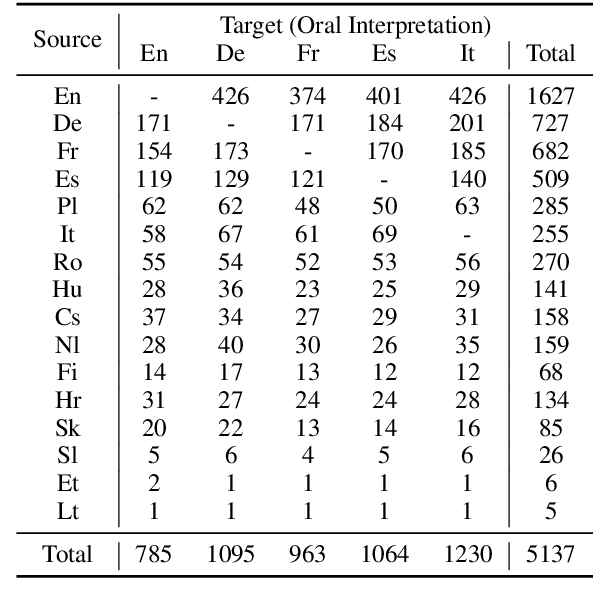

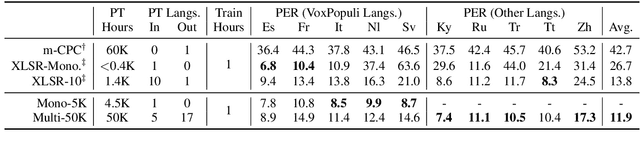
We introduce VoxPopuli, a large-scale multilingual corpus providing 100K hours of unlabelled speech data in 23 languages. It is the largest open data to date for unsupervised representation learning as well as semi-supervised learning. VoxPopuli also contains 1.8K hours of transcribed speeches in 16 languages and their aligned oral interpretations into 5 other languages totaling 5.1K hours. We provide speech recognition baselines and validate the versatility of VoxPopuli unlabelled data in semi-supervised learning under challenging out-of-domain settings. We will release the corpus at https://github.com/facebookresearch/voxpopuli under an open license.