 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Efficient Speculative Decoding for Llama at Scale: Challenges and Solutions
Aug 11, 2025Speculative decoding is a standard method for accelerating the inference speed of large language models. However, scaling it for production environments poses several engineering challenges, including efficiently implementing different operations (e.g., tree attention and multi-round speculative decoding) on GPU. In this paper, we detail the training and inference optimization techniques that we have implemented to enable EAGLE-based speculative decoding at a production scale for Llama models. With these changes, we achieve a new state-of-the-art inference latency for Llama models. For example, Llama4 Maverick decodes at a speed of about 4 ms per token (with a batch size of one) on 8 NVIDIA H100 GPUs, which is 10% faster than the previously best known method. Furthermore, for EAGLE-based speculative decoding, our optimizations enable us to achieve a speed-up for large batch sizes between 1.4x and 2.0x at production scale.
SpineWave: Harnessing Fish Rigid-Flexible Spinal Kinematics for Enhancing Biomimetic Robotic Locomotion
May 22, 2025Fish have endured millions of years of evolution, and their distinct rigid-flexible body structures offer inspiration for overcoming challenges in underwater robotics, such as limited mobility, high energy consumption, and adaptability. This paper introduces SpineWave, a biomimetic robotic fish featuring a fish-spine-like rigid-flexible transition structure. The structure integrates expandable fishbone-like ribs and adjustable magnets, mimicking the stretch and recoil of fish muscles to balance rigidity and flexibility. In addition, we employed an evolutionary algorithm to optimize the hydrodynamics of the robot, achieving significant improvements in swimming performance. Real-world tests demonstrated robustness and potential for environmental monitoring, underwater exploration, and industrial inspection. These tests established SpineWave as a transformative platform for aquatic robotics.
Efficient Navigation of a Robotic Fish Swimming Across the Vortical Flow Field
May 23, 2024Navigating efficiently across vortical flow fields presents a significant challenge in various robotic applications. The dynamic and unsteady nature of vortical flows often disturbs the control of underwater robots, complicating their operation in hydrodynamic environments. Conventional control methods, which depend on accurate modeling, fail in these settings due to the complexity of fluid-structure interactions (FSI) caused by unsteady hydrodynamics. This study proposes a deep reinforcement learning (DRL) algorithm, trained in a data-driven manner, to enable efficient navigation of a robotic fish swimming across vortical flows. Our proposed algorithm incorporates the LSTM architecture and uses several recent consecutive observations as the state to address the issue of partial observation, often due to sensor limitations. We present a numerical study of navigation within a Karman vortex street, created by placing a stationary cylinder in a uniform flow, utilizing the immersed boundary-lattice Boltzmann method (IB-LBM). The aim is to train the robotic fish to discover efficient navigation policies, enabling it to reach a designated target point across the Karman vortex street from various initial positions. After training, the fish demonstrates the ability to rapidly reach the target from different initial positions, showcasing the effectiveness and robustness of our proposed algorithm. Analysis of the results reveals that the robotic fish can leverage velocity gains and pressure differences induced by the vortices to reach the target, underscoring the potential of our proposed algorithm in enhancing navigation in complex hydrodynamic environments.
Zeus: Understanding and Optimizing GPU Energy Consumption of DNN Training
Aug 12, 2022



Training deep neural networks (DNNs) is becoming more and more resource- and energy-intensive every year. Unfortunately, existing works primarily focus on optimizing DNN training for faster completion, often without considering the impact on energy efficiency. In this paper, we observe that common practices to improve training performance can often lead to inefficient energy usage. More importantly, we demonstrate that there is a tradeoff between energy consumption and performance optimization. To this end, we propose an optimization framework, Zeus, to navigate this tradeoff by automatically finding optimal job- and GPU-level configurations for recurring DNN training jobs. Zeus uses an online exploration-exploitation approach in conjunction with just-in-time energy profiling, averting the need for expensive offline measurements, while adapting to data drifts over time. Our evaluation shows that Zeus can improve the energy efficiency of DNN training by 15.3%--75.8% for diverse workloads.
Blockchain Framework for Artificial Intelligence Computation
Feb 23, 2022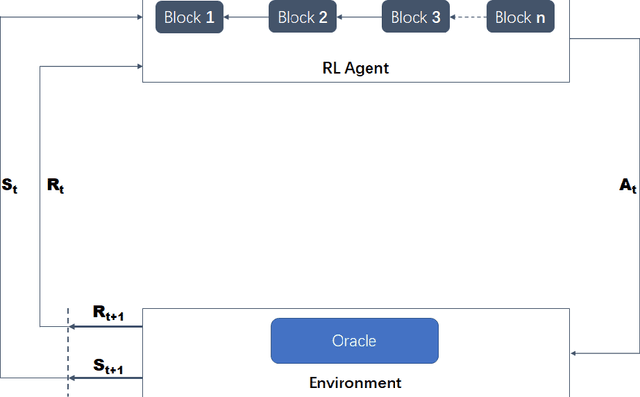

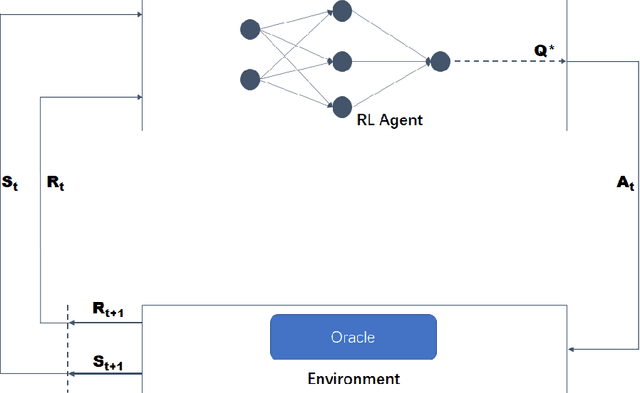
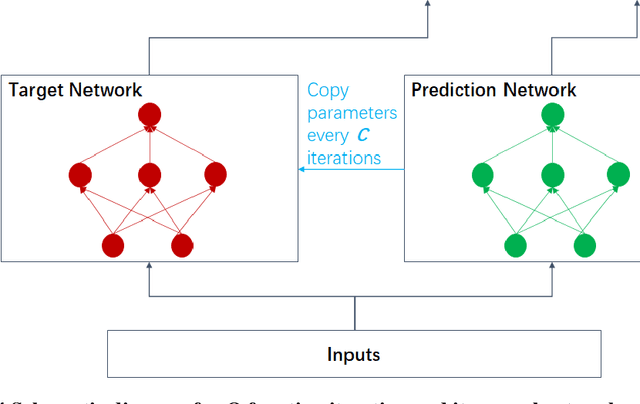
Blockchain is an essentially distributed database recording all transactions or digital events among participating parties. Each transaction in the records is approved and verified by consensus of the participants in the system that requires solving a hard mathematical puzzle, which is known as proof-of-work. To make the approved records immutable, the mathematical puzzle is not trivial to solve and therefore consumes substantial computing resources. However, it is energy-wasteful to have many computational nodes installed in the blockchain competing to approve the records by just solving a meaningless puzzle. Here, we pose proof-of-work as a reinforcement-learning problem by modeling the blockchain growing as a Markov decision process, in which a learning agent makes an optimal decision over the environment's state, whereas a new block is added and verified. Specifically, we design the block verification and consensus mechanism as a deep reinforcement-learning iteration process. As a result, our method utilizes the determination of state transition and the randomness of action selection of a Markov decision process, as well as the computational complexity of a deep neural network, collectively to make the blocks not easy to recompute and to preserve the order of transactions, while the blockchain nodes are exploited to train the same deep neural network with different data samples (state-action pairs) in parallel, allowing the model to experience multiple episodes across computing nodes but at one time. Our method is used to design the next generation of public blockchain networks, which has the potential not only to spare computational resources for industrial applications but also to encourage data sharing and AI model design for common problems.
* 10 pages, 4 figures
Concept based Attention
May 11, 2016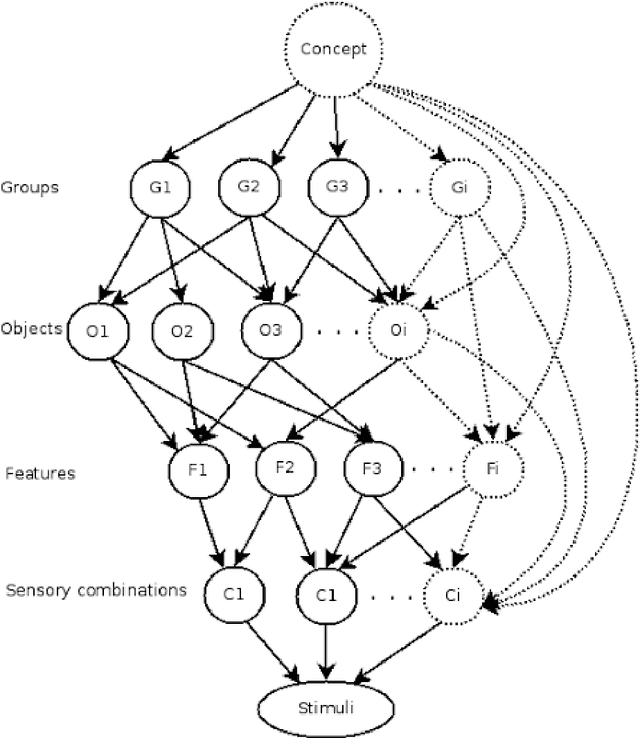
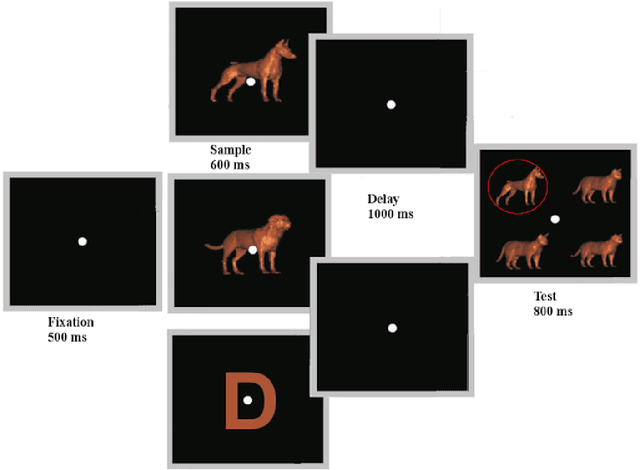
Attention endows animals an ability to concentrate on the most relevant information among a deluge of distractors at any given time, either through volitionally 'top-down' biasing, or driven by automatically 'bottom-up' saliency of stimuli, in favour of advantageous competition in neural modulations for information processing. Nevertheless, instead of being limited to perceive simple features, human and other advanced animals adaptively learn the world into categories and abstract concepts from experiences, imparting the world meanings. This thesis suggests that the high-level cognitive ability of human is more likely driven by attention basing on abstract perceptions, which is defined as concept based attention (CbA).
* 7 pages, 2 figures