 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Object-Based Transition Models for 3D Partially Observable Environments
Mar 08, 2021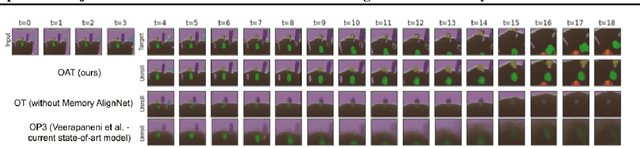
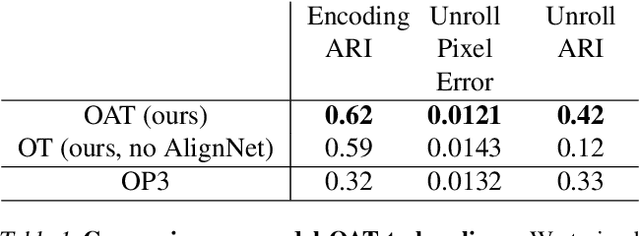
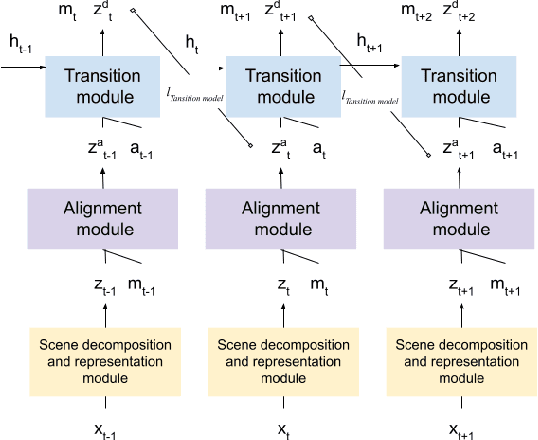
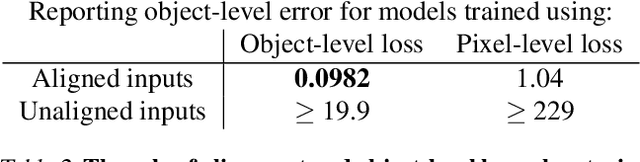
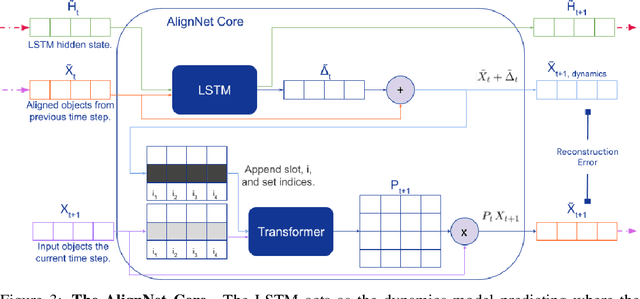
We present a slot-wise, object-based transition model that decomposes a scene into objects, aligns them (with respect to a slot-wise object memory) to maintain a consistent order across time, and predicts how those objects evolve over successive frames. The model is trained end-to-end without supervision using losses at the level of the object-structured representation rather than pixels. Thanks to its alignment module, the model deals properly with two issues that are not handled satisfactorily by other transition models, namely object persistence and object identity. We show that the combination of an object-level loss and correct object alignment over time enables the model to outperform a state-of-the-art baseline, and allows it to deal well with object occlusion and re-appearance in partially observable environments.
AlignNet: Unsupervised Entity Alignment
Jul 21, 2020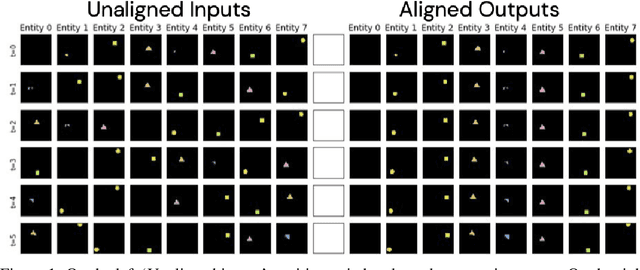

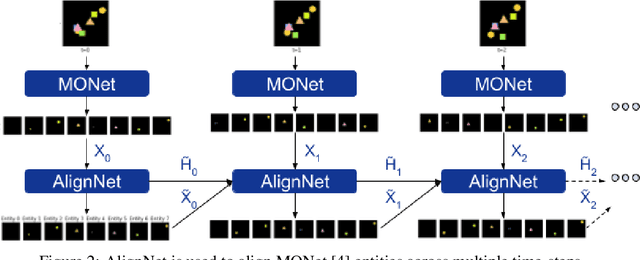
Recently developed deep learning models are able to learn to segment scenes into component objects without supervision. This opens many new and exciting avenues of research, allowing agents to take objects (or entities) as inputs, rather that pixels. Unfortunately, while these models provide excellent segmentation of a single frame, they do not keep track of how objects segmented at one time-step correspond (or align) to those at a later time-step. The alignment (or correspondence) problem has impeded progress towards using object representations in downstream tasks. In this paper we take steps towards solving the alignment problem, presenting the AlignNet, an unsupervised alignment module.
Multi-Object Representation Learning with Iterative Variational Inference
Mar 01, 2019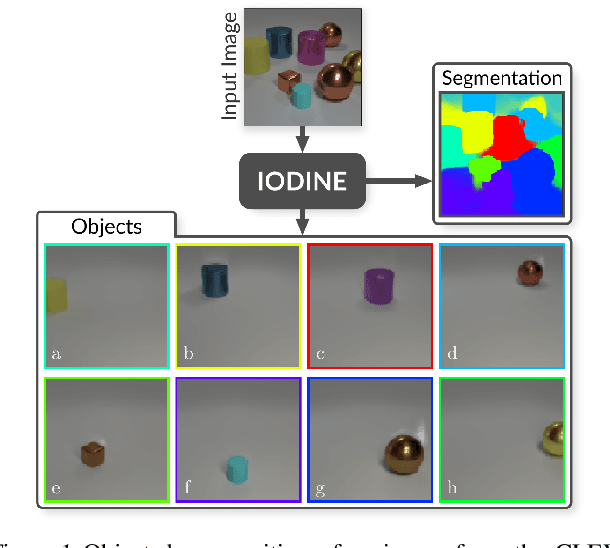
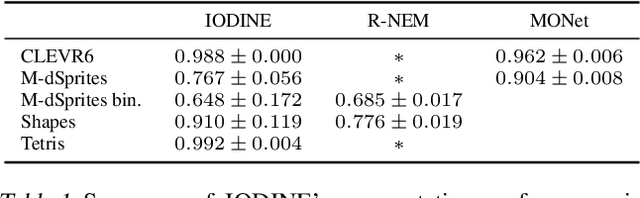
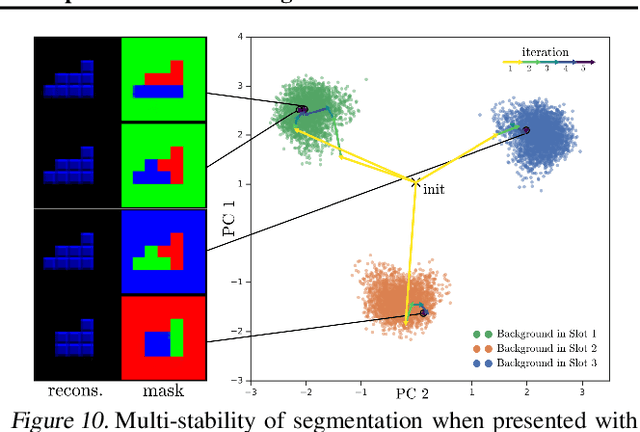
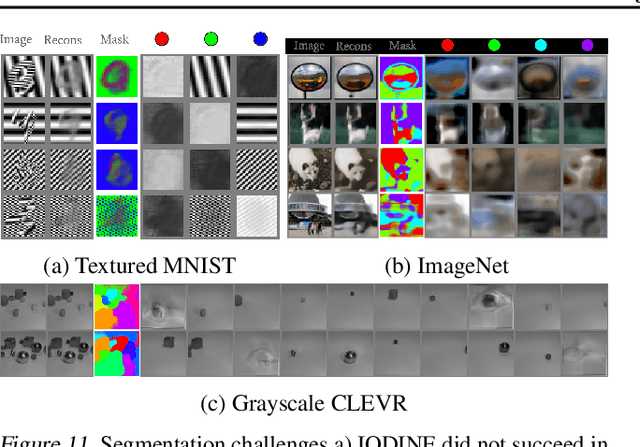
Human perception is structured around objects which form the basis for our higher-level cognition and impressive systematic generalization abilities. Yet most work on representation learning focuses on feature learning without even considering multiple objects, or treats segmentation as an (often supervised) preprocessing step. Instead, we argue for the importance of learning to segment and represent objects jointly. We demonstrate that, starting from the simple assumption that a scene is composed of multiple entities, it is possible to learn to segment images into interpretable objects with disentangled representations. Our method learns -- without supervision -- to inpaint occluded parts, and extrapolates to scenes with more objects and to unseen objects with novel feature combinations. We also show that, due to the use of iterative variational inference, our system is able to learn multi-modal posteriors for ambiguous inputs and extends naturally to sequences.