 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Inference-Aware Fine-Tuning for Best-of-N Sampling in Large Language Models
Dec 18, 2024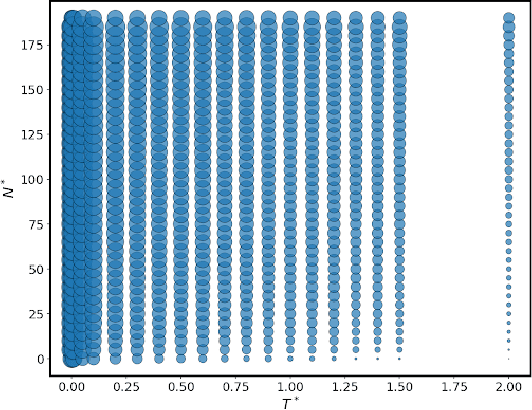
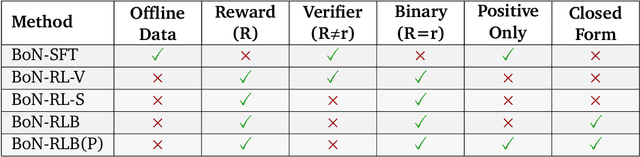
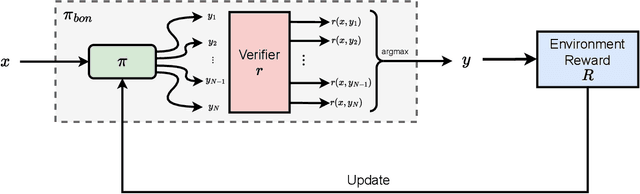
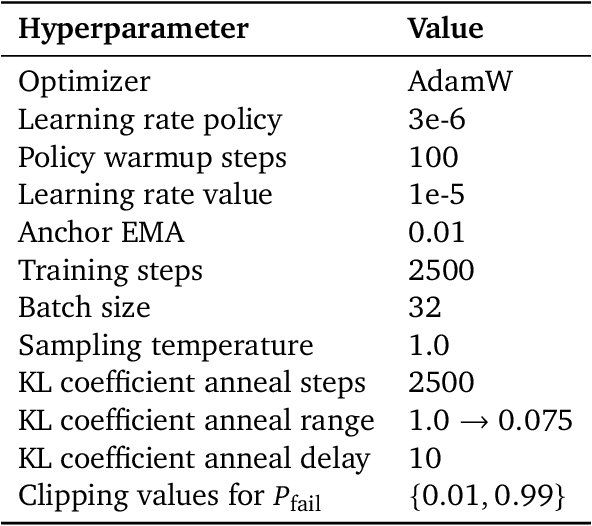
Recent studies have indicated that effectively utilizing inference-time compute is crucial for attaining better performance from large language models (LLMs). In this work, we propose a novel inference-aware fine-tuning paradigm, in which the model is fine-tuned in a manner that directly optimizes the performance of the inference-time strategy. We study this paradigm using the simple yet effective Best-of-N (BoN) inference strategy, in which a verifier selects the best out of a set of LLM-generated responses. We devise the first imitation learning and reinforcement learning~(RL) methods for BoN-aware fine-tuning, overcoming the challenging, non-differentiable argmax operator within BoN. We empirically demonstrate that our BoN-aware models implicitly learn a meta-strategy that interleaves best responses with more diverse responses that might be better suited to a test-time input -- a process reminiscent of the exploration-exploitation trade-off in RL. Our experiments demonstrate the effectiveness of BoN-aware fine-tuning in terms of improved performance and inference-time compute. In particular, we show that our methods improve the Bo32 performance of Gemma 2B on Hendrycks MATH from 26.8% to 30.8%, and pass@32 from 60.0% to 67.0%, as well as the pass@16 on HumanEval from 61.6% to 67.1%.
Personalized and Sequential Text-to-Image Generation
Dec 10, 2024



We address the problem of personalized, interactive text-to-image (T2I) generation, designing a reinforcement learning (RL) agent which iteratively improves a set of generated images for a user through a sequence of prompt expansions. Using human raters, we create a novel dataset of sequential preferences, which we leverage, together with large-scale open-source (non-sequential) datasets. We construct user-preference and user-choice models using an EM strategy and identify varying user preference types. We then leverage a large multimodal language model (LMM) and a value-based RL approach to suggest a personalized and diverse slate of prompt expansions to the user. Our Personalized And Sequential Text-to-image Agent (PASTA) extends T2I models with personalized multi-turn capabilities, fostering collaborative co-creation and addressing uncertainty or underspecification in a user's intent. We evaluate PASTA using human raters, showing significant improvement compared to baseline methods. We also release our sequential rater dataset and simulated user-rater interactions to support future research in personalized, multi-turn T2I generation.
Embedding-Aligned Language Models
May 24, 2024We propose a novel approach for training large language models (LLMs) to adhere to objectives defined within a latent embedding space. Our method leverages reinforcement learning (RL), treating a pre-trained LLM as an environment. Our embedding-aligned guided language (EAGLE) agent is trained to iteratively steer the LLM's generation towards optimal regions of the latent embedding space, w.r.t. some predefined criterion. We demonstrate the effectiveness of the EAGLE agent using the MovieLens 25M dataset to surface content gaps that satisfy latent user demand. We also demonstrate the benefit of using an optimal design of a state-dependent action set to improve EAGLE's efficiency. Our work paves the way for controlled and grounded text generation using LLMs, ensuring consistency with domain-specific knowledge and data representations.
DynaMITE-RL: A Dynamic Model for Improved Temporal Meta-Reinforcement Learning
Feb 25, 2024



We introduce DynaMITE-RL, a meta-reinforcement learning (meta-RL) approach to approximate inference in environments where the latent state evolves at varying rates. We model episode sessions - parts of the episode where the latent state is fixed - and propose three key modifications to existing meta-RL methods: consistency of latent information within sessions, session masking, and prior latent conditioning. We demonstrate the importance of these modifications in various domains, ranging from discrete Gridworld environments to continuous-control and simulated robot assistive tasks, demonstrating that DynaMITE-RL significantly outperforms state-of-the-art baselines in sample efficiency and inference returns.
Preference Elicitation with Soft Attributes in Interactive Recommendation
Oct 22, 2023



Preference elicitation plays a central role in interactive recommender systems. Most preference elicitation approaches use either item queries that ask users to select preferred items from a slate, or attribute queries that ask them to express their preferences for item characteristics. Unfortunately, users often wish to describe their preferences using soft attributes for which no ground-truth semantics is given. Leveraging concept activation vectors for soft attribute semantics, we develop novel preference elicitation methods that can accommodate soft attributes and bring together both item and attribute-based preference elicitation. Our techniques query users using both items and soft attributes to update the recommender system's belief about their preferences to improve recommendation quality. We demonstrate the effectiveness of our methods vis-a-vis competing approaches on both synthetic and real-world datasets.
Factual and Personalized Recommendations using Language Models and Reinforcement Learning
Oct 09, 2023



Recommender systems (RSs) play a central role in connecting users to content, products, and services, matching candidate items to users based on their preferences. While traditional RSs rely on implicit user feedback signals, conversational RSs interact with users in natural language. In this work, we develop a comPelling, Precise, Personalized, Preference-relevant language model (P4LM) that recommends items to users while putting emphasis on explaining item characteristics and their relevance. P4LM uses the embedding space representation of a user's preferences to generate compelling responses that are factually-grounded and relevant w.r.t. the user's preferences. Moreover, we develop a joint reward function that measures precision, appeal, and personalization, which we use as AI-based feedback in a reinforcement learning-based language model framework. Using the MovieLens 25M dataset, we demonstrate that P4LM delivers compelling, personalized movie narratives to users.
Demystifying Embedding Spaces using Large Language Models
Oct 06, 2023Embeddings have become a pivotal means to represent complex, multi-faceted information about entities, concepts, and relationships in a condensed and useful format. Nevertheless, they often preclude direct interpretation. While downstream tasks make use of these compressed representations, meaningful interpretation usually requires visualization using dimensionality reduction or specialized machine learning interpretability methods. This paper addresses the challenge of making such embeddings more interpretable and broadly useful, by employing Large Language Models (LLMs) to directly interact with embeddings -- transforming abstract vectors into understandable narratives. By injecting embeddings into LLMs, we enable querying and exploration of complex embedding data. We demonstrate our approach on a variety of diverse tasks, including: enhancing concept activation vectors (CAVs), communicating novel embedded entities, and decoding user preferences in recommender systems. Our work couples the immense information potential of embeddings with the interpretative power of LLMs.
Offline Reinforcement Learning for Mixture-of-Expert Dialogue Management
Feb 21, 2023Reinforcement learning (RL) has shown great promise for developing dialogue management (DM) agents that are non-myopic, conduct rich conversations, and maximize overall user satisfaction. Despite recent developments in RL and language models (LMs), using RL to power conversational chatbots remains challenging, in part because RL requires online exploration to learn effectively, whereas collecting novel human-bot interactions can be expensive and unsafe. This issue is exacerbated by the combinatorial action spaces facing these algorithms, as most LM agents generate responses at the word level. We develop a variety of RL algorithms, specialized to dialogue planning, that leverage recent Mixture-of-Expert Language Models (MoE-LMs) -- models that capture diverse semantics, generate utterances reflecting different intents, and are amenable for multi-turn DM. By exploiting MoE-LM structure, our methods significantly reduce the size of the action space and improve the efficacy of RL-based DM. We evaluate our methods in open-domain dialogue to demonstrate their effectiveness w.r.t.\ the diversity of intent in generated utterances and overall DM performance.
Dynamic Planning in Open-Ended Dialogue using Reinforcement Learning
Jul 25, 2022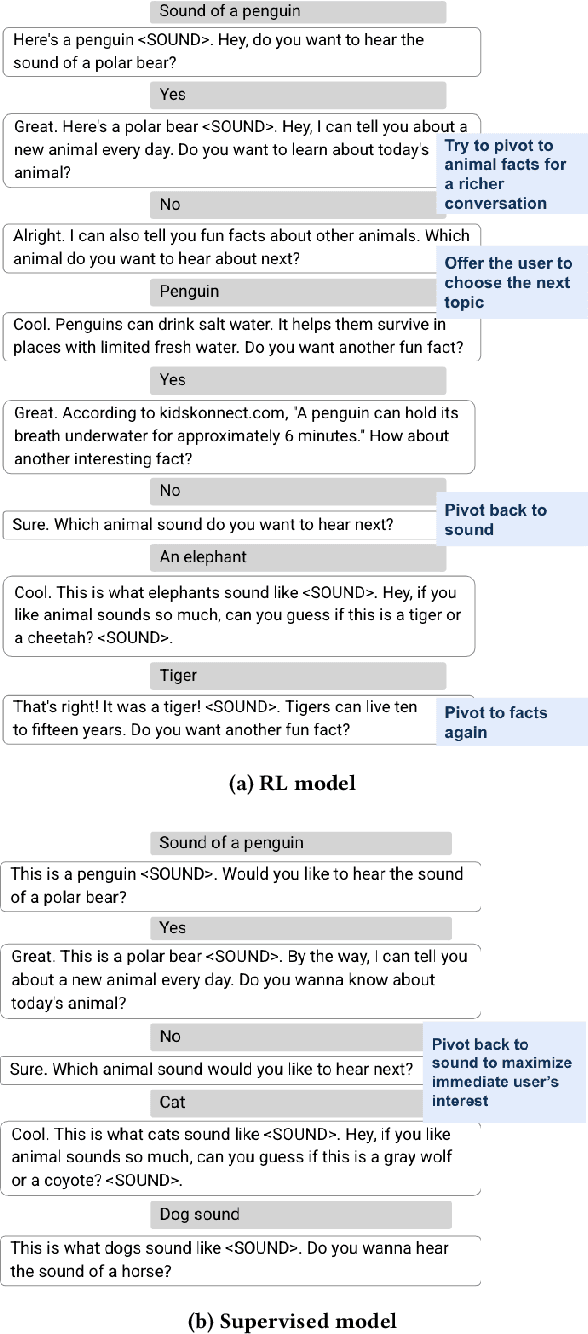
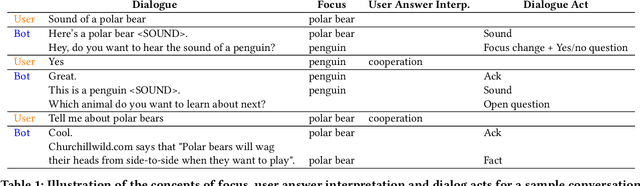
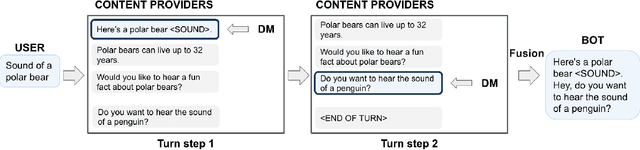
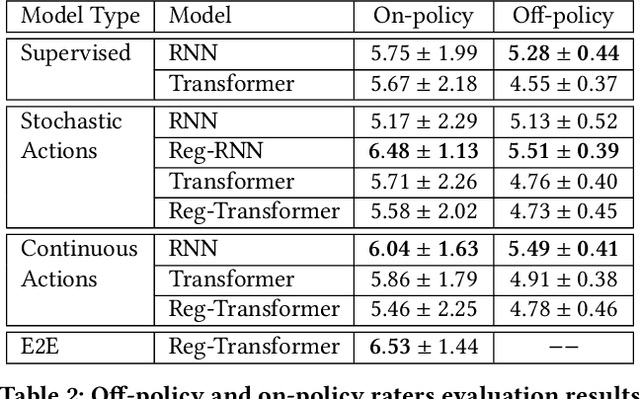
Despite recent advances in natural language understanding and generation, and decades of research on the development of conversational bots, building automated agents that can carry on rich open-ended conversations with humans "in the wild" remains a formidable challenge. In this work we develop a real-time, open-ended dialogue system that uses reinforcement learning (RL) to power a bot's conversational skill at scale. Our work pairs the succinct embedding of the conversation state generated using SOTA (supervised) language models with RL techniques that are particularly suited to a dynamic action space that changes as the conversation progresses. Trained using crowd-sourced data, our novel system is able to substantially exceeds the (strong) baseline supervised model with respect to several metrics of interest in a live experiment with real users of the Google Assistant.