 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAND Me the Data: Fast Robot Adaptation via Hand Path Retrieval
May 28, 2025



We hand the community HAND, a simple and time-efficient method for teaching robots new manipulation tasks through human hand demonstrations. Instead of relying on task-specific robot demonstrations collected via teleoperation, HAND uses easy-to-provide hand demonstrations to retrieve relevant behaviors from task-agnostic robot play data. Using a visual tracking pipeline, HAND extracts the motion of the human hand from the hand demonstration and retrieves robot sub-trajectories in two stages: first filtering by visual similarity, then retrieving trajectories with similar behaviors to the hand. Fine-tuning a policy on the retrieved data enables real-time learning of tasks in under four minutes, without requiring calibrated cameras or detailed hand pose estimation. Experiments also show that HAND outperforms retrieval baselines by over 2x in average task success rates on real robots. Videos can be found at our project website: https://liralab.usc.edu/handretrieval/.
CLAM: Continuous Latent Action Models for Robot Learning from Unlabeled Demonstrations
May 08, 2025Learning robot policies using imitation learning requires collecting large amounts of costly action-labeled expert demonstrations, which fundamentally limits the scale of training data. A promising approach to address this bottleneck is to harness the abundance of unlabeled observations-e.g., from video demonstrations-to learn latent action labels in an unsupervised way. However, we find that existing methods struggle when applied to complex robot tasks requiring fine-grained motions. We design continuous latent action models (CLAM) which incorporate two key ingredients we find necessary for learning to solve complex continuous control tasks from unlabeled observation data: (a) using continuous latent action labels instead of discrete representations, and (b) jointly training an action decoder to ensure that the latent action space can be easily grounded to real actions with relatively few labeled examples. Importantly, the labeled examples can be collected from non-optimal play data, enabling CLAM to learn performant policies without access to any action-labeled expert data. We demonstrate on continuous control benchmarks in DMControl (locomotion) and MetaWorld (manipulation), as well as on a real WidowX robot arm that CLAM significantly outperforms prior state-of-the-art methods, remarkably with a 2-3x improvement in task success rate compared to the best baseline. Videos and code can be found at clamrobot.github.io.
ViSaRL: Visual Reinforcement Learning Guided by Human Saliency
Mar 16, 2024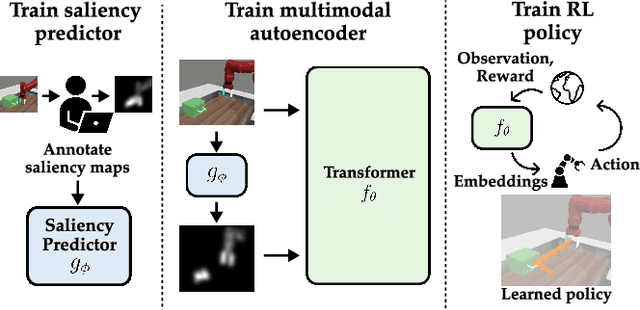
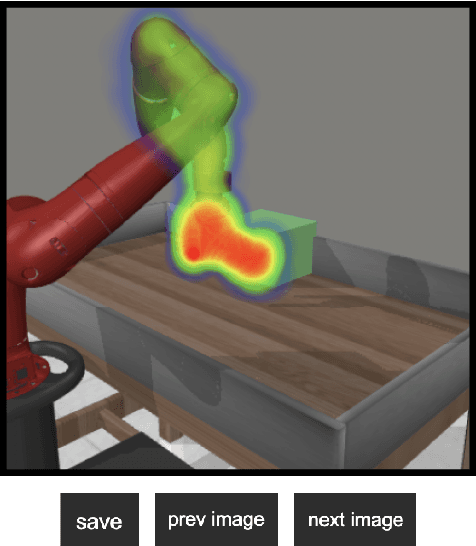
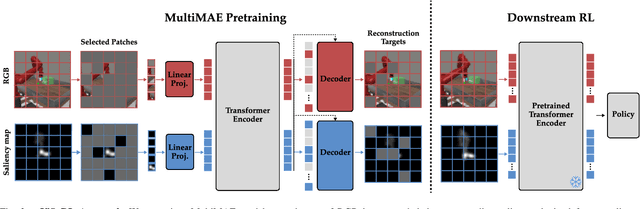
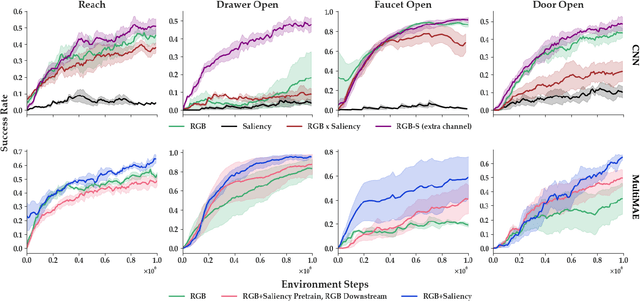
Training robots to perform complex control tasks from high-dimensional pixel input using reinforcement learning (RL) is sample-inefficient, because image observations are comprised primarily of task-irrelevant information. By contrast, humans are able to visually attend to task-relevant objects and areas. Based on this insight, we introduce Visual Saliency-Guided Reinforcement Learning (ViSaRL). Using ViSaRL to learn visual representations significantly improves the success rate, sample efficiency, and generalization of an RL agent on diverse tasks including DeepMind Control benchmark, robot manipulation in simulation and on a real robot. We present approaches for incorporating saliency into both CNN and Transformer-based encoders. We show that visual representations learned using ViSaRL are robust to various sources of visual perturbations including perceptual noise and scene variations. ViSaRL nearly doubles success rate on the real-robot tasks compared to the baseline which does not use saliency.
DynaMITE-RL: A Dynamic Model for Improved Temporal Meta-Reinforcement Learning
Feb 25, 2024



We introduce DynaMITE-RL, a meta-reinforcement learning (meta-RL) approach to approximate inference in environments where the latent state evolves at varying rates. We model episode sessions - parts of the episode where the latent state is fixed - and propose three key modifications to existing meta-RL methods: consistency of latent information within sessions, session masking, and prior latent conditioning. We demonstrate the importance of these modifications in various domains, ranging from discrete Gridworld environments to continuous-control and simulated robot assistive tasks, demonstrating that DynaMITE-RL significantly outperforms state-of-the-art baselines in sample efficiency and inference returns.
Reinforcement Learning for Sparse-Reward Object-Interaction Tasks in First-person Simulated 3D Environments
Oct 28, 2020
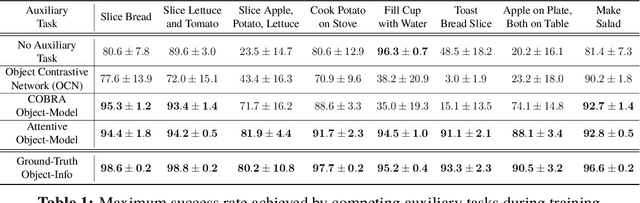
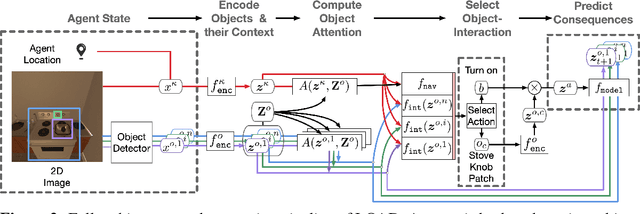
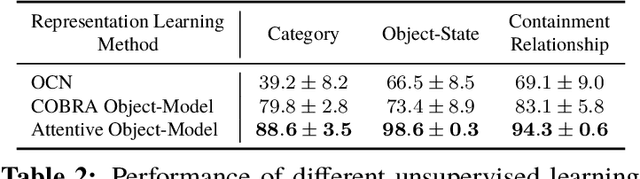
First-person object-interaction tasks in high-fidelity, 3D, simulated environments such as the AI2Thor virtual home-environment pose significant sample-efficiency challenges for reinforcement learning (RL) agents learning from sparse task rewards. To alleviate these challenges, prior work has provided extensive supervision via a combination of reward-shaping, ground-truth object-information, and expert demonstrations. In this work, we show that one can learn object-interaction tasks from scratch without supervision by learning an attentive object-model as an auxiliary task during task learning with an object-centric relational RL agent. Our key insight is that learning an object-model that incorporates object-attention into forward prediction provides a dense learning signal for unsupervised representation learning of both objects and their relationships. This, in turn, enables faster policy learning for an object-centric relational RL agent. We demonstrate our agent by introducing a set of challenging object-interaction tasks in the AI2Thor environment where learning with our attentive object-model is key to strong performance. Specifically, we compare our agent and relational RL agents with alternative auxiliary tasks to a relational RL agent equipped with ground-truth object-information, and show that learning with our object-model best closes the performance gap in terms of both learning speed and maximum success rate. Additionally, we find that incorporating object-attention into an object-model's forward predictions is key to learning representations which capture object-category and object-state.