 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagen 3
Aug 13, 2024We introduce Imagen 3, a latent diffusion model that generates high quality images from text prompts. We describe our quality and responsibility evaluations. Imagen 3 is preferred over other state-of-the-art (SOTA) models at the time of evaluation. In addition, we discuss issues around safety and representation, as well as methods we used to minimize the potential harm of our models.
Genie: Generative Interactive Environments
Feb 23, 2024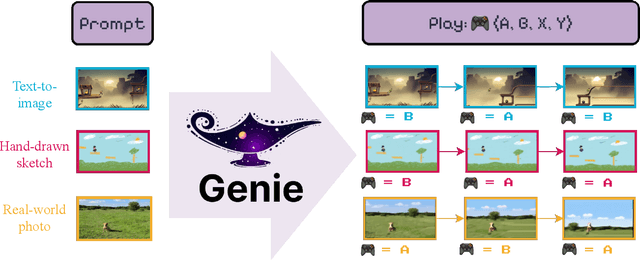
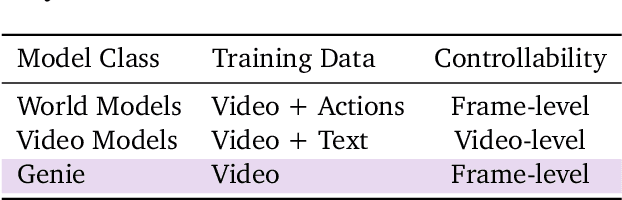
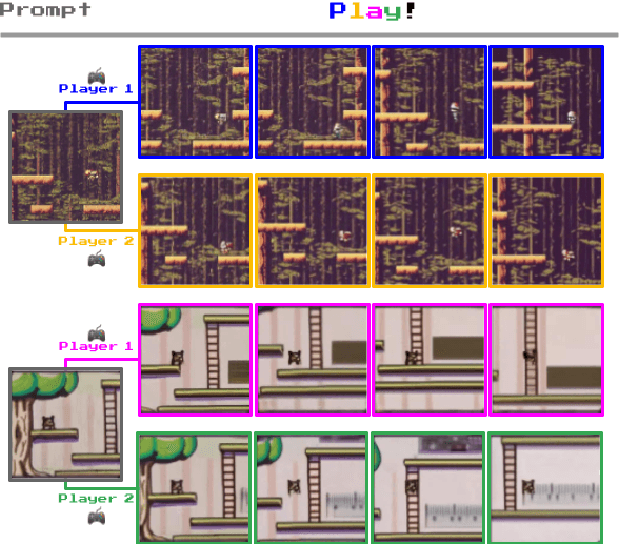
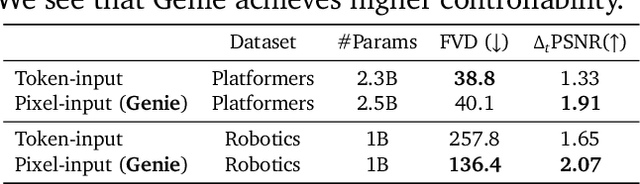
We introduce Genie, the first generative interactive environment trained in an unsupervised manner from unlabelled Internet videos. The model can be prompted to generate an endless variety of action-controllable virtual worlds described through text, synthetic images, photographs, and even sketches. At 11B parameters, Genie can be considered a foundation world model. It is comprised of a spatiotemporal video tokenizer, an autoregressive dynamics model, and a simple and scalable latent action model. Genie enables users to act in the generated environments on a frame-by-frame basis despite training without any ground-truth action labels or other domain-specific requirements typically found in the world model literature. Further the resulting learned latent action space facilitates training agents to imitate behaviors from unseen videos, opening the path for training generalist agents of the future.
Reinforced Self-Training (ReST) for Language Modeling
Aug 21, 2023Reinforcement learning from human feedback (RLHF) can improve the quality of large language model's (LLM) outputs by aligning them with human preferences. We propose a simple algorithm for aligning LLMs with human preferences inspired by growing batch reinforcement learning (RL), which we call Reinforced Self-Training (ReST). Given an initial LLM policy, ReST produces a dataset by generating samples from the policy, which are then used to improve the LLM policy using offline RL algorithms. ReST is more efficient than typical online RLHF methods because the training dataset is produced offline, which allows data reuse. While ReST is a general approach applicable to all generative learning settings, we focus on its application to machine translation. Our results show that ReST can substantially improve translation quality, as measured by automated metrics and human evaluation on machine translation benchmarks in a compute and sample-efficient manner.
AlphaStar Unplugged: Large-Scale Offline Reinforcement Learning
Aug 07, 2023



StarCraft II is one of the most challenging simulated reinforcement learning environments; it is partially observable, stochastic, multi-agent, and mastering StarCraft II requires strategic planning over long time horizons with real-time low-level execution. It also has an active professional competitive scene. StarCraft II is uniquely suited for advancing offline RL algorithms, both because of its challenging nature and because Blizzard has released a massive dataset of millions of StarCraft II games played by human players. This paper leverages that and establishes a benchmark, called AlphaStar Unplugged, introducing unprecedented challenges for offline reinforcement learning. We define a dataset (a subset of Blizzard's release), tools standardizing an API for machine learning methods, and an evaluation protocol. We also present baseline agents, including behavior cloning, offline variants of actor-critic and MuZero. We improve the state of the art of agents using only offline data, and we achieve 90% win rate against previously published AlphaStar behavior cloning agent.
Knowledge Transfer from Teachers to Learners in Growing-Batch Reinforcement Learning
May 09, 2023



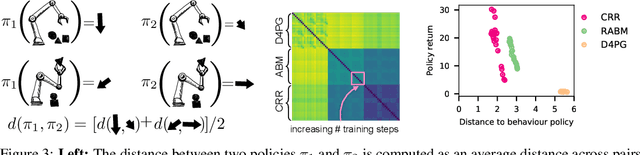
Standard approaches to sequential decision-making exploit an agent's ability to continually interact with its environment and improve its control policy. However, due to safety, ethical, and practicality constraints, this type of trial-and-error experimentation is often infeasible in many real-world domains such as healthcare and robotics. Instead, control policies in these domains are typically trained offline from previously logged data or in a growing-batch manner. In this setting a fixed policy is deployed to the environment and used to gather an entire batch of new data before being aggregated with past batches and used to update the policy. This improvement cycle can then be repeated multiple times. While a limited number of such cycles is feasible in real-world domains, the quality and diversity of the resulting data are much lower than in the standard continually-interacting approach. However, data collection in these domains is often performed in conjunction with human experts, who are able to label or annotate the collected data. In this paper, we first explore the trade-offs present in this growing-batch setting, and then investigate how information provided by a teacher (i.e., demonstrations, expert actions, and gradient information) can be leveraged at training time to mitigate the sample complexity and coverage requirements for actor-critic methods. We validate our contributions on tasks from the DeepMind Control Suite.
Vision-Language Models as Success Detectors
Mar 13, 2023Detecting successful behaviour is crucial for training intelligent agents. As such, generalisable reward models are a prerequisite for agents that can learn to generalise their behaviour. In this work we focus on developing robust success detectors that leverage large, pretrained vision-language models (Flamingo, Alayrac et al. (2022)) and human reward annotations. Concretely, we treat success detection as a visual question answering (VQA) problem, denoted SuccessVQA. We study success detection across three vastly different domains: (i) interactive language-conditioned agents in a simulated household, (ii) real world robotic manipulation, and (iii) "in-the-wild" human egocentric videos. We investigate the generalisation properties of a Flamingo-based success detection model across unseen language and visual changes in the first two domains, and find that the proposed method is able to outperform bespoke reward models in out-of-distribution test scenarios with either variation. In the last domain of "in-the-wild" human videos, we show that success detection on unseen real videos presents an even more challenging generalisation task warranting future work. We hope our initial results encourage further work in real world success detection and reward modelling.
Towards Learning Universal Hyperparameter Optimizers with Transformers
May 26, 2022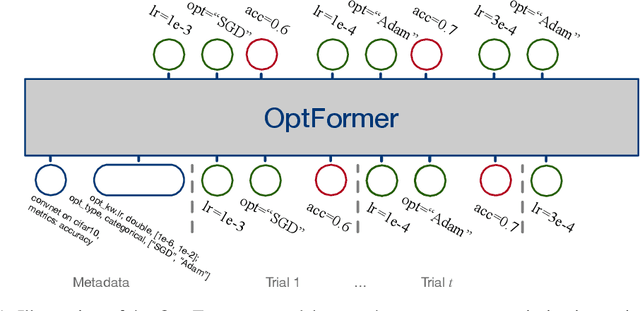
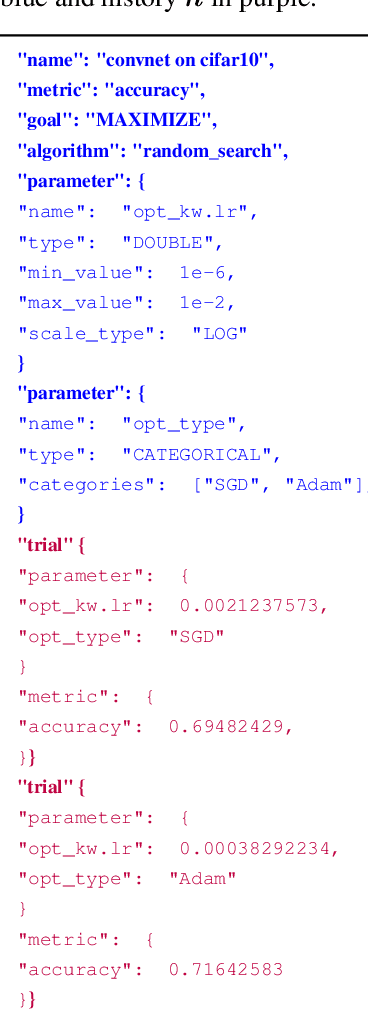

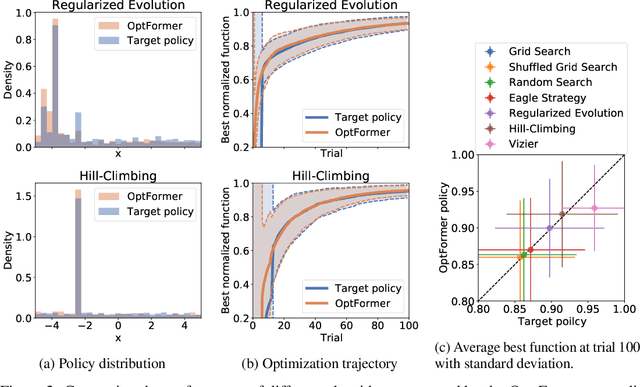
Meta-learning hyperparameter optimization (HPO) algorithms from prior experiments is a promising approach to improve optimization efficiency over objective functions from a similar distribution. However, existing methods are restricted to learning from experiments sharing the same set of hyperparameters. In this paper, we introduce the OptFormer, the first text-based Transformer HPO framework that provides a universal end-to-end interface for jointly learning policy and function prediction when trained on vast tuning data from the wild. Our extensive experiments demonstrate that the OptFormer can imitate at least 7 different HPO algorithms, which can be further improved via its function uncertainty estimates. Compared to a Gaussian Process, the OptFormer also learns a robust prior distribution for hyperparameter response functions, and can thereby provide more accurate and better calibrated predictions. This work paves the path to future extensions for training a Transformer-based model as a general HPO optimizer.
A Generalist Agent
May 19, 2022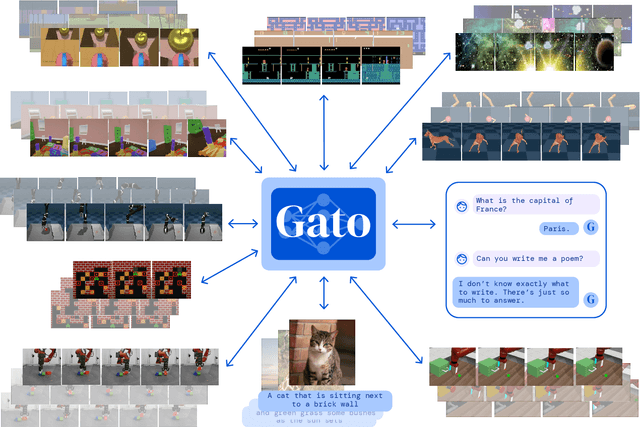
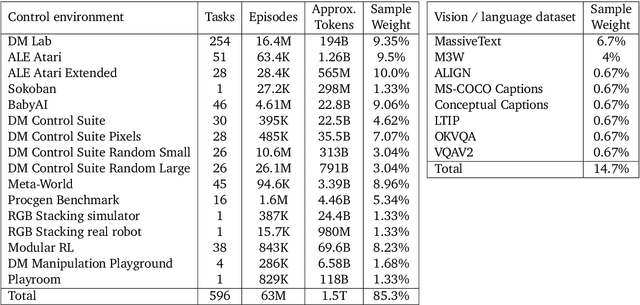
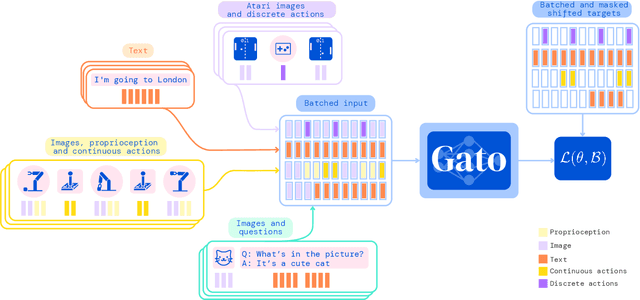

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
Shaking the foundations: delusions in sequence models for interaction and control
Oct 20, 2021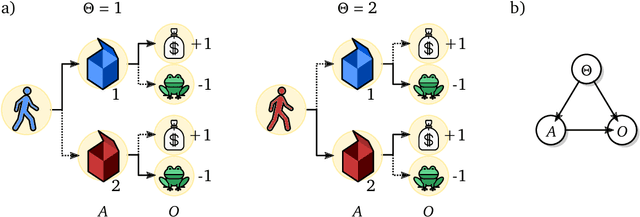
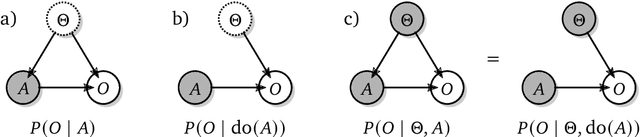
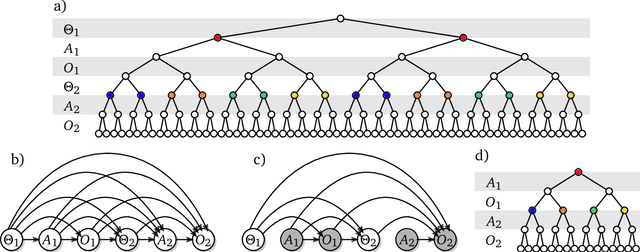
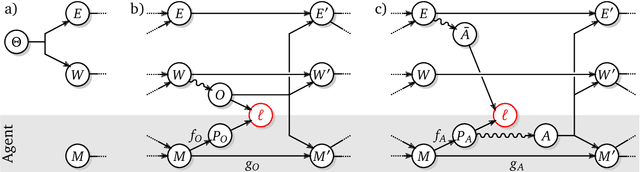
The recent phenomenal success of language models has reinvigorated machine learning research, and large sequence models such as transformers are being applied to a variety of domains. One important problem class that has remained relatively elusive however is purposeful adaptive behavior. Currently there is a common perception that sequence models "lack the understanding of the cause and effect of their actions" leading them to draw incorrect inferences due to auto-suggestive delusions. In this report we explain where this mismatch originates, and show that it can be resolved by treating actions as causal interventions. Finally, we show that in supervised learning, one can teach a system to condition or intervene on data by training with factual and counterfactual error signals respectively.
Active Offline Policy Selection
Jun 18, 2021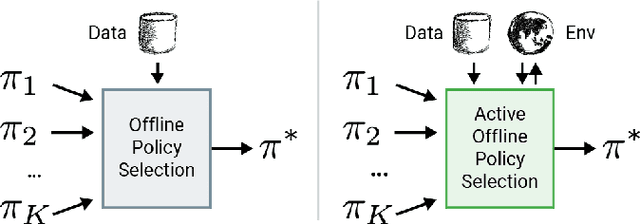
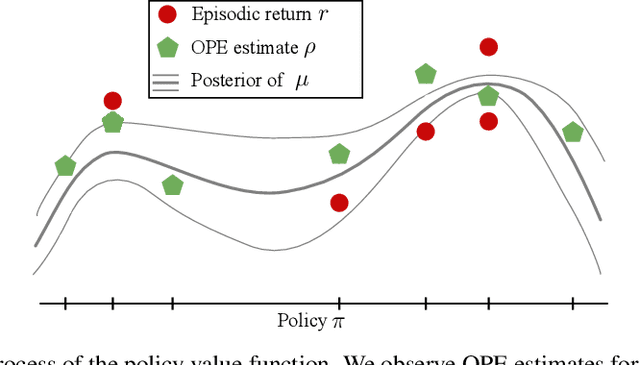

This paper addresses the problem of policy selection in domains with abundant logged data, but with a very restricted interaction budget. Solving this problem would enable safe evaluation and deployment of offline reinforcement learning policies in industry, robotics, and healthcare domain among others. Several off-policy evaluation (OPE) techniques have been proposed to assess the value of policies using only logged data. However, there is still a big gap between the evaluation by OPE and the full online evaluation in the real environment. To reduce this gap, we introduce a novel \emph{active offline policy selection} problem formulation, which combined logged data and limited online interactions to identify the best policy. We rely on the advances in OPE to warm start the evaluation. We build upon Bayesian optimization to iteratively decide which policies to evaluate in order to utilize the limited environment interactions wisely. Many candidate policies could be proposed, thus, we focus on making our approach scalable and introduce a kernel function to model similarity between policies. We use several benchmark environments to show that the proposed approach improves upon state-of-the-art OPE estimates and fully online policy evaluation with limited budget. Additionally, we show that each component of the proposed method is important, it works well with various number and quality of OPE estimates and even with a large number of candidate policies.