 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNotes on the Reward Representation of Posterior Updates
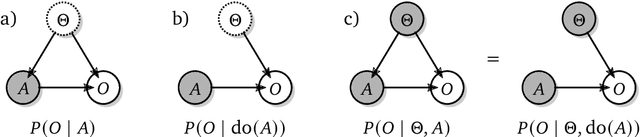
Feb 02, 2026Many ideas in modern control and reinforcement learning treat decision-making as inference: start from a baseline distribution and update it when a signal arrives. We ask when this can be made literal rather than metaphorical. We study the special case where a KL-regularized soft update is exactly a Bayesian posterior inside a single fixed probabilistic model, so the update variable is a genuine channel through which information is transmitted. In this regime, behavioral change is driven only by evidence carried by that channel: the update must be explainable as an evidence reweighing of the baseline. This yields a sharp identification result: posterior updates determine the relative, context-dependent incentive signal that shifts behavior, but they do not uniquely determine absolute rewards, which remain ambiguous up to context-specific baselines. Requiring one reusable continuation value across different update directions adds a further coherence constraint linking the reward descriptions associated with different conditioning orders.
Neural Networks and the Chomsky Hierarchy
Jul 05, 2022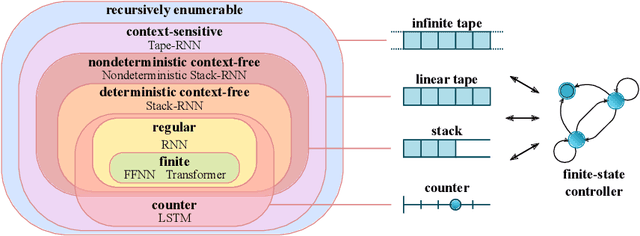



Reliable generalization lies at the heart of safe ML and AI. However, understanding when and how neural networks generalize remains one of the most important unsolved problems in the field. In this work, we conduct an extensive empirical study (2200 models, 16 tasks) to investigate whether insights from the theory of computation can predict the limits of neural network generalization in practice. We demonstrate that grouping tasks according to the Chomsky hierarchy allows us to forecast whether certain architectures will be able to generalize to out-of-distribution inputs. This includes negative results where even extensive amounts of data and training time never led to any non-trivial generalization, despite models having sufficient capacity to perfectly fit the training data. Our results show that, for our subset of tasks, RNNs and Transformers fail to generalize on non-regular tasks, LSTMs can solve regular and counter-language tasks, and only networks augmented with structured memory (such as a stack or memory tape) can successfully generalize on context-free and context-sensitive tasks.
Model-Free Risk-Sensitive Reinforcement Learning
Nov 04, 2021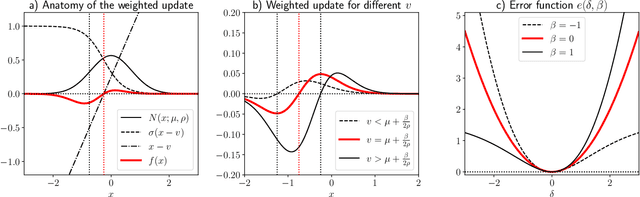
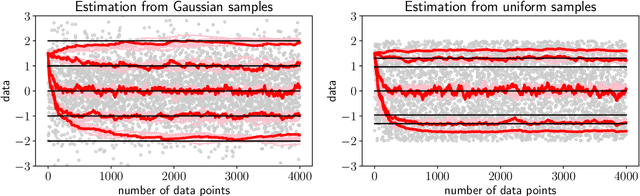
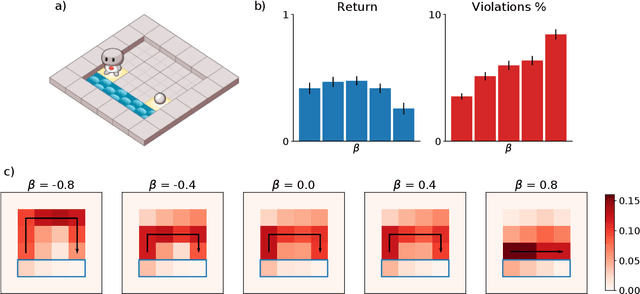

We extend temporal-difference (TD) learning in order to obtain risk-sensitive, model-free reinforcement learning algorithms. This extension can be regarded as modification of the Rescorla-Wagner rule, where the (sigmoidal) stimulus is taken to be either the event of over- or underestimating the TD target. As a result, one obtains a stochastic approximation rule for estimating the free energy from i.i.d. samples generated by a Gaussian distribution with unknown mean and variance. Since the Gaussian free energy is known to be a certainty-equivalent sensitive to the mean and the variance, the learning rule has applications in risk-sensitive decision-making.
Shaking the foundations: delusions in sequence models for interaction and control
Oct 20, 2021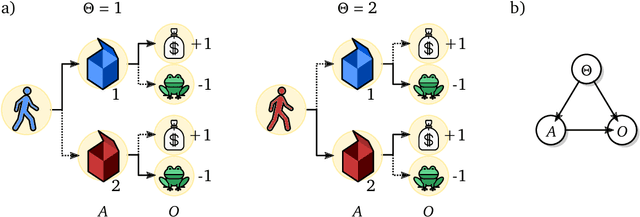
The recent phenomenal success of language models has reinvigorated machine learning research, and large sequence models such as transformers are being applied to a variety of domains. One important problem class that has remained relatively elusive however is purposeful adaptive behavior. Currently there is a common perception that sequence models "lack the understanding of the cause and effect of their actions" leading them to draw incorrect inferences due to auto-suggestive delusions. In this report we explain where this mismatch originates, and show that it can be resolved by treating actions as causal interventions. Finally, we show that in supervised learning, one can teach a system to condition or intervene on data by training with factual and counterfactual error signals respectively.
Causal Analysis of Agent Behavior for AI Safety
Mar 05, 2021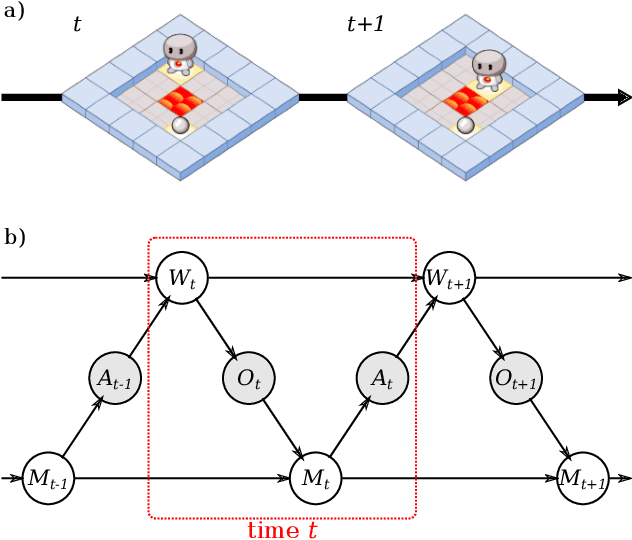
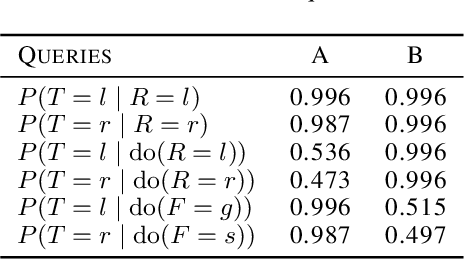
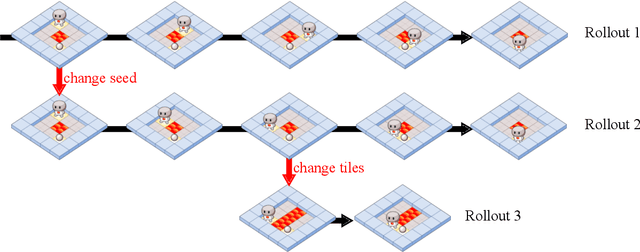

As machine learning systems become more powerful they also become increasingly unpredictable and opaque. Yet, finding human-understandable explanations of how they work is essential for their safe deployment. This technical report illustrates a methodology for investigating the causal mechanisms that drive the behaviour of artificial agents. Six use cases are covered, each addressing a typical question an analyst might ask about an agent. In particular, we show that each question cannot be addressed by pure observation alone, but instead requires conducting experiments with systematically chosen manipulations so as to generate the correct causal evidence.
Algorithms for Causal Reasoning in Probability Trees
Nov 12, 2020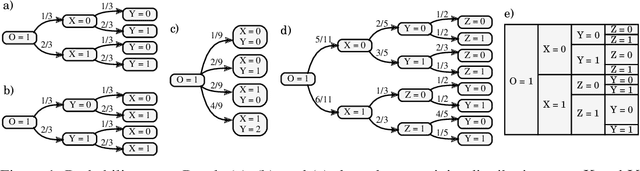
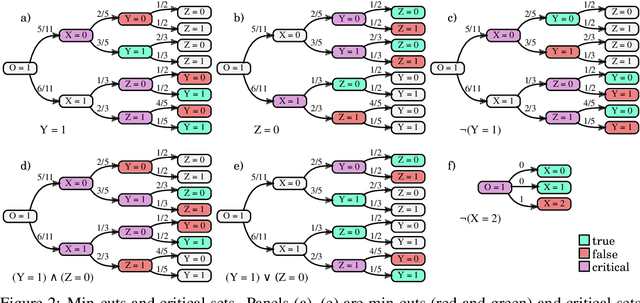

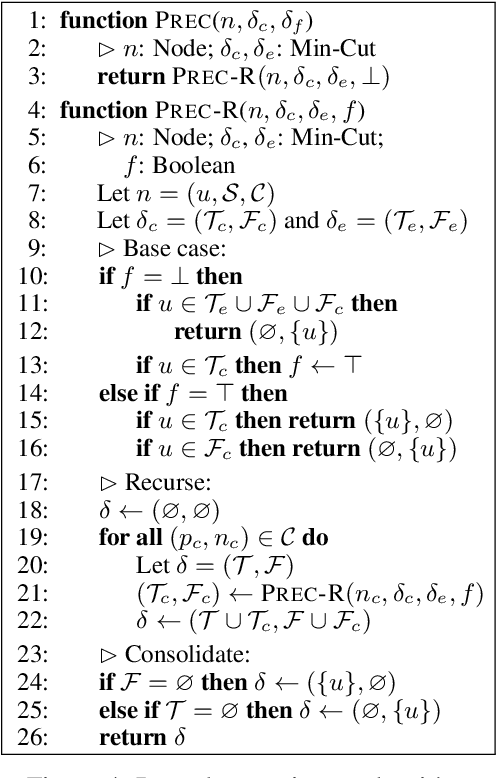
Probability trees are one of the simplest models of causal generative processes. They possess clean semantics and -- unlike causal Bayesian networks -- they can represent context-specific causal dependencies, which are necessary for e.g. causal induction. Yet, they have received little attention from the AI and ML community. Here we present concrete algorithms for causal reasoning in discrete probability trees that cover the entire causal hierarchy (association, intervention, and counterfactuals), and operate on arbitrary propositional and causal events. Our work expands the domain of causal reasoning to a very general class of discrete stochastic processes.
Meta-trained agents implement Bayes-optimal agents
Oct 21, 2020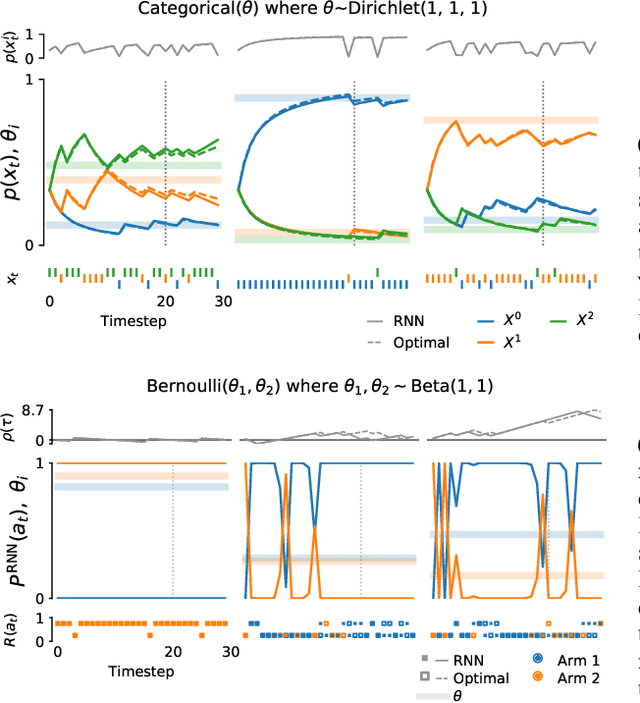
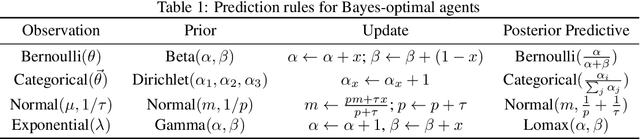
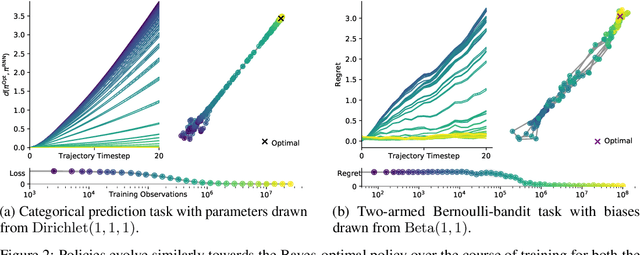
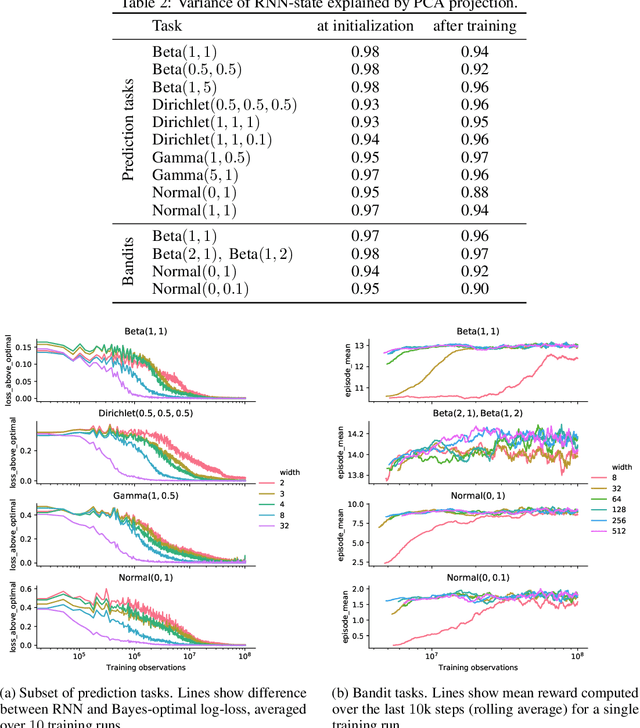
Memory-based meta-learning is a powerful technique to build agents that adapt fast to any task within a target distribution. A previous theoretical study has argued that this remarkable performance is because the meta-training protocol incentivises agents to behave Bayes-optimally. We empirically investigate this claim on a number of prediction and bandit tasks. Inspired by ideas from theoretical computer science, we show that meta-learned and Bayes-optimal agents not only behave alike, but they even share a similar computational structure, in the sense that one agent system can approximately simulate the other. Furthermore, we show that Bayes-optimal agents are fixed points of the meta-learning dynamics. Our results suggest that memory-based meta-learning might serve as a general technique for numerically approximating Bayes-optimal agents - that is, even for task distributions for which we currently don't possess tractable models.
Action and Perception as Divergence Minimization
Oct 05, 2020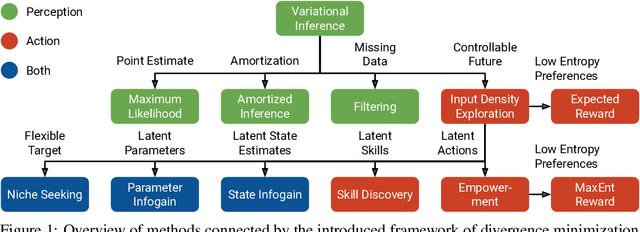

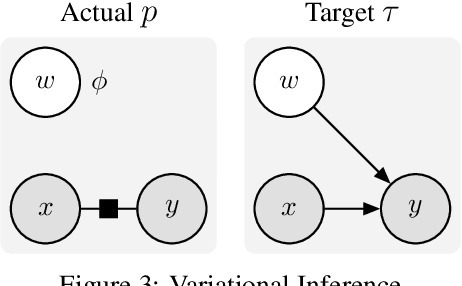
We introduce a unified objective for action and perception of intelligent agents. Extending representation learning and control, we minimize the joint divergence between the combined system of agent and environment and a target distribution. Intuitively, such agents use perception to align their beliefs with the world, and use actions to align the world with their beliefs. Minimizing the joint divergence to an expressive target maximizes the mutual information between the agent's representations and inputs, thus inferring representations that are informative of past inputs and exploring future inputs that are informative of the representations. This lets us explain intrinsic objectives, such as representation learning, information gain, empowerment, and skill discovery from minimal assumptions. Moreover, interpreting the target distribution as a latent variable model suggests powerful world models as a path toward highly adaptive agents that seek large niches in their environments, rendering task rewards optional. The framework provides a common language for comparing a wide range of objectives, advances the understanding of latent variables for decision making, and offers a recipe for designing novel objectives. We recommend deriving future agent objectives the joint divergence to facilitate comparison, to point out the agent's target distribution, and to identify the intrinsic objective terms needed to reach that distribution.
Meta reinforcement learning as task inference
May 15, 2019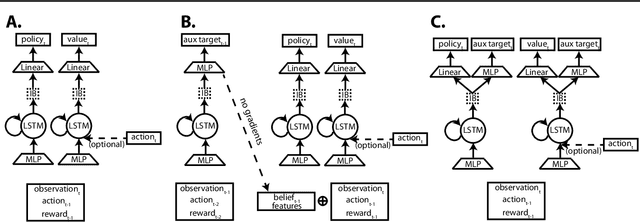
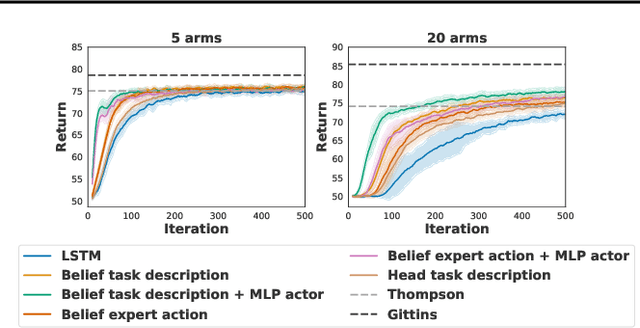
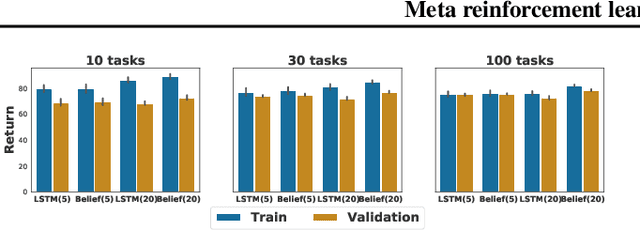
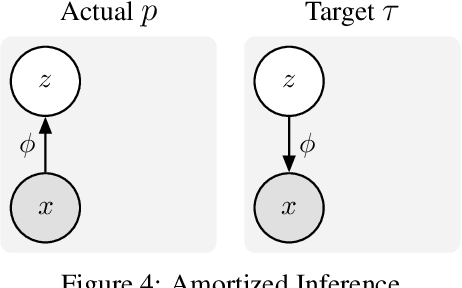
Humans achieve efficient learning by relying on prior knowledge about the structure of naturally occurring tasks. There has been considerable interest in designing reinforcement learning algorithms with similar properties. This includes several proposals to learn the learning algorithm itself, an idea also referred to as meta learning. One formal interpretation of this idea is in terms of a partially observable multi-task reinforcement learning problem in which information about the task is hidden from the agent. Although agents that solve partially observable environments can be trained from rewards alone, shaping an agent's memory with additional supervision has been shown to boost learning efficiency. It is thus natural to ask what kind of supervision, if any, facilitates meta-learning. Here we explore several choices and develop an architecture that separates learning of the belief about the unknown task from learning of the policy, and that can be used effectively with privileged information about the task during training. We show that this approach can be very effective at solving standard meta-RL environments, as well as a complex continuous control environment in which a simulated robot has to execute various movement sequences.
Meta-learning of Sequential Strategies
May 08, 2019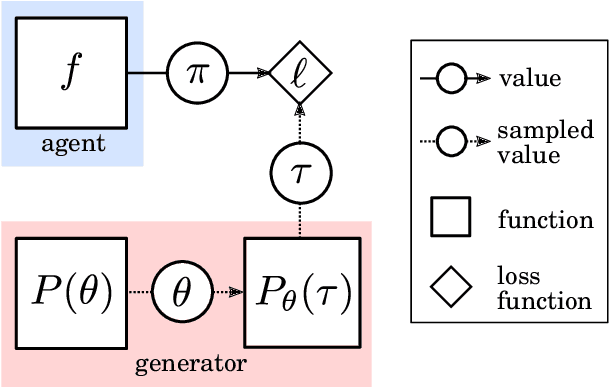
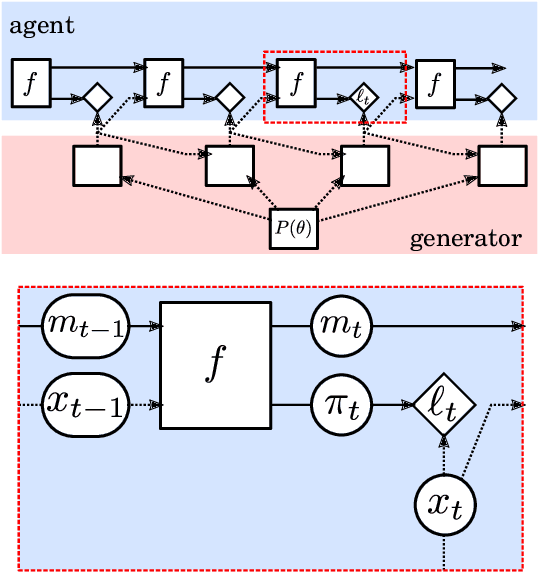
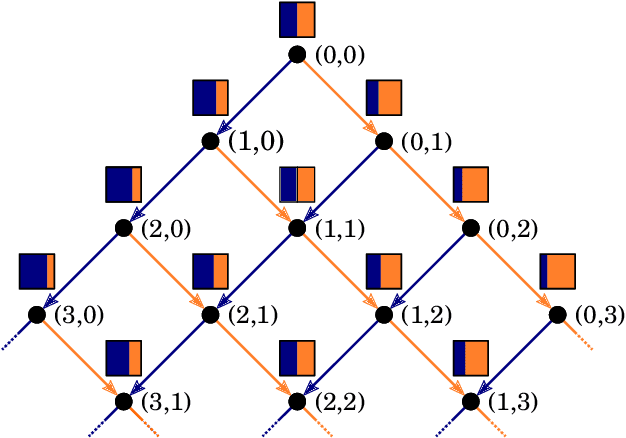
In this report we review memory-based meta-learning as a tool for building sample-efficient strategies that learn from past experience to adapt to any task within a target class. Our goal is to equip the reader with the conceptual foundations of this tool for building new, scalable agents that operate on broad domains. To do so, we present basic algorithmic templates for building near-optimal predictors and reinforcement learners which behave as if they had a probabilistic model that allowed them to efficiently exploit task structure. Furthermore, we recast memory-based meta-learning within a Bayesian framework, showing that the meta-learned strategies are near-optimal because they amortize Bayes-filtered data, where the adaptation is implemented in the memory dynamics as a state-machine of sufficient statistics. Essentially, memory-based meta-learning translates the hard problem of probabilistic sequential inference into a regression problem.