 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePartition Tree Weighting for Non-Stationary Stochastic Bandits
Feb 26, 2025
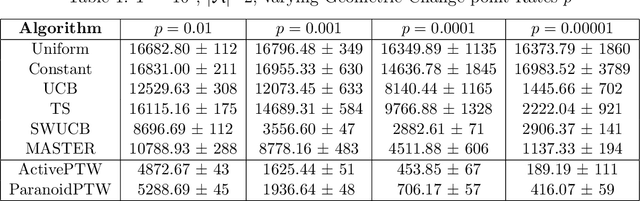
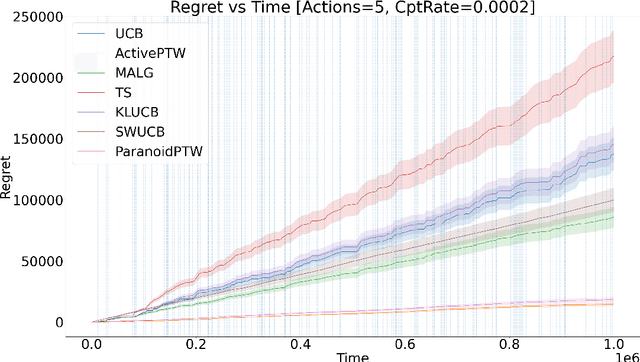
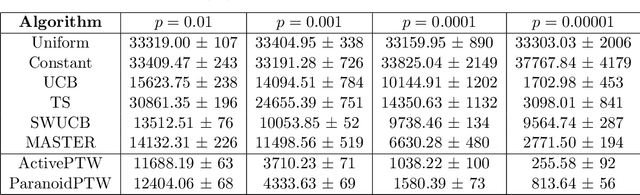
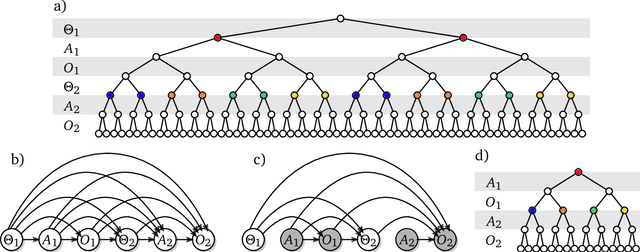
This paper considers a generalisation of universal source coding for interaction data, namely data streams that have actions interleaved with observations. Our goal will be to construct a coding distribution that is both universal \emph{and} can be used as a control policy. Allowing for action generation needs careful treatment, as naive approaches which do not distinguish between actions and observations run into the self-delusion problem in universal settings. We showcase our perspective in the context of the challenging non-stationary stochastic Bernoulli bandit problem. Our main contribution is an efficient and high performing algorithm for this problem that generalises the Partition Tree Weighting universal source coding technique for passive prediction to the control setting.
Compression via Pre-trained Transformers: A Study on Byte-Level Multimodal Data
Oct 07, 2024

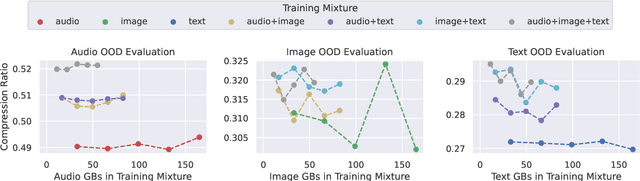
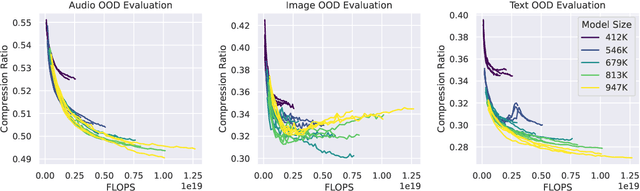
Foundation models have recently been shown to be strong data compressors. However, when accounting for their excessive parameter count, their compression ratios are actually inferior to standard compression algorithms. Moreover, naively reducing the number of parameters may not necessarily help as it leads to worse predictions and thus weaker compression. In this paper, we conduct a large-scale empirical study to investigate whether there is a sweet spot where competitive compression ratios with pre-trained vanilla transformers are possible. To this end, we train families of models on 165GB of raw byte sequences of either text, image, or audio data (and all possible combinations of the three) and then compress 1GB of out-of-distribution (OOD) data from each modality. We find that relatively small models (i.e., millions of parameters) can outperform standard general-purpose compression algorithms (gzip, LZMA2) and even domain-specific compressors (PNG, JPEG 2000, FLAC) - even when factoring in parameter count. We achieve, e.g., the lowest compression ratio of 0.49 on OOD audio data (vs. 0.54 for FLAC). To study the impact of model- and dataset scale, we conduct extensive ablations and hyperparameter sweeps, and we investigate the effect of unimodal versus multimodal training. We find that even small models can be trained to perform well on multiple modalities, but, in contrast to previously reported results with large-scale foundation models, transfer to unseen modalities is generally weak.
Learning Universal Predictors
Jan 26, 2024



Meta-learning has emerged as a powerful approach to train neural networks to learn new tasks quickly from limited data. Broad exposure to different tasks leads to versatile representations enabling general problem solving. But, what are the limits of meta-learning? In this work, we explore the potential of amortizing the most powerful universal predictor, namely Solomonoff Induction (SI), into neural networks via leveraging meta-learning to its limits. We use Universal Turing Machines (UTMs) to generate training data used to expose networks to a broad range of patterns. We provide theoretical analysis of the UTM data generation processes and meta-training protocols. We conduct comprehensive experiments with neural architectures (e.g. LSTMs, Transformers) and algorithmic data generators of varying complexity and universality. Our results suggest that UTM data is a valuable resource for meta-learning, and that it can be used to train neural networks capable of learning universal prediction strategies.
Language Modeling Is Compression
Sep 19, 2023It has long been established that predictive models can be transformed into lossless compressors and vice versa. Incidentally, in recent years, the machine learning community has focused on training increasingly large and powerful self-supervised (language) models. Since these large language models exhibit impressive predictive capabilities, they are well-positioned to be strong compressors. In this work, we advocate for viewing the prediction problem through the lens of compression and evaluate the compression capabilities of large (foundation) models. We show that large language models are powerful general-purpose predictors and that the compression viewpoint provides novel insights into scaling laws, tokenization, and in-context learning. For example, Chinchilla 70B, while trained primarily on text, compresses ImageNet patches to 43.4% and LibriSpeech samples to 16.4% of their raw size, beating domain-specific compressors like PNG (58.5%) or FLAC (30.3%), respectively. Finally, we show that the prediction-compression equivalence allows us to use any compressor (like gzip) to build a conditional generative model.
Randomized Positional Encodings Boost Length Generalization of Transformers
May 26, 2023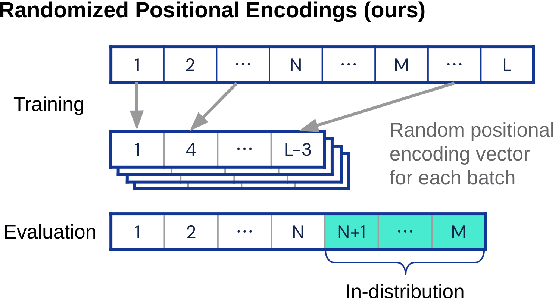
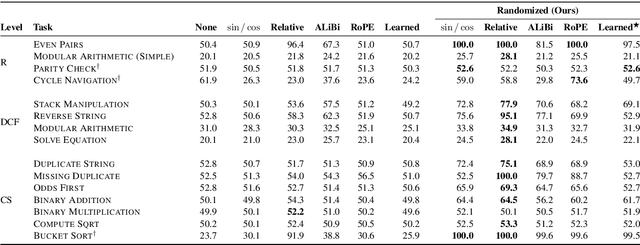
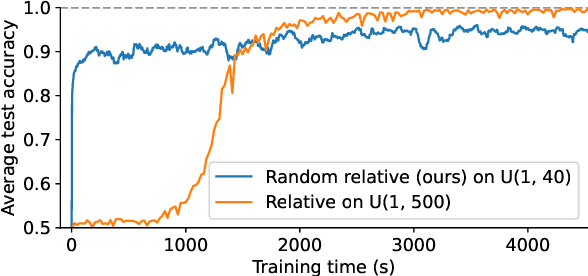
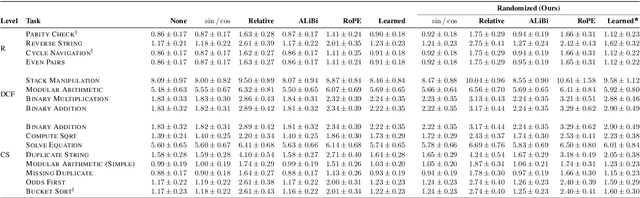
Transformers have impressive generalization capabilities on tasks with a fixed context length. However, they fail to generalize to sequences of arbitrary length, even for seemingly simple tasks such as duplicating a string. Moreover, simply training on longer sequences is inefficient due to the quadratic computation complexity of the global attention mechanism. In this work, we demonstrate that this failure mode is linked to positional encodings being out-of-distribution for longer sequences (even for relative encodings) and introduce a novel family of positional encodings that can overcome this problem. Concretely, our randomized positional encoding scheme simulates the positions of longer sequences and randomly selects an ordered subset to fit the sequence's length. Our large-scale empirical evaluation of 6000 models across 15 algorithmic reasoning tasks shows that our method allows Transformers to generalize to sequences of unseen length (increasing test accuracy by 12.0% on average).
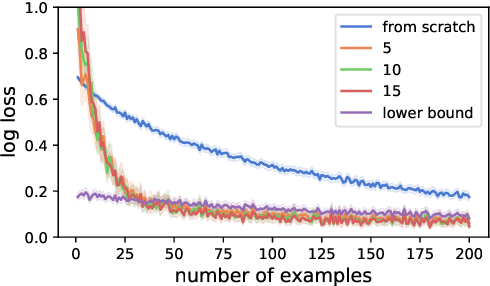
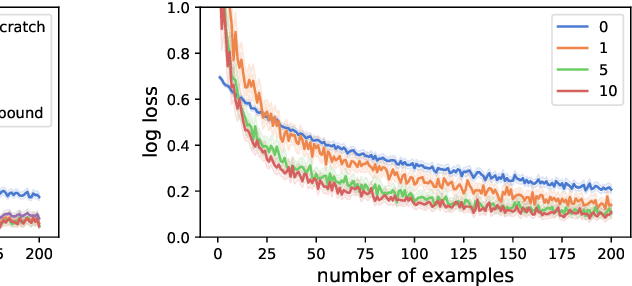
Memory-Based Meta-Learning on Non-Stationary Distributions
Feb 06, 2023Memory-based meta-learning is a technique for approximating Bayes-optimal predictors. Under fairly general conditions, minimizing sequential prediction error, measured by the log loss, leads to implicit meta-learning. The goal of this work is to investigate how far this interpretation can be realized by current sequence prediction models and training regimes. The focus is on piecewise stationary sources with unobserved switching-points, which arguably capture an important characteristic of natural language and action-observation sequences in partially observable environments. We show that various types of memory-based neural models, including Transformers, LSTMs, and RNNs can learn to accurately approximate known Bayes-optimal algorithms and behave as if performing Bayesian inference over the latent switching-points and the latent parameters governing the data distribution within each segment.
Beyond Bayes-optimality: meta-learning what you know you don't know
Oct 12, 2022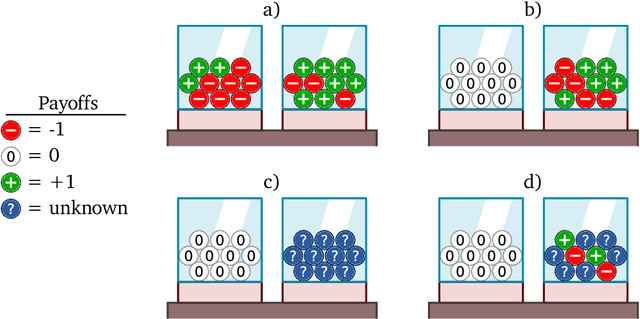
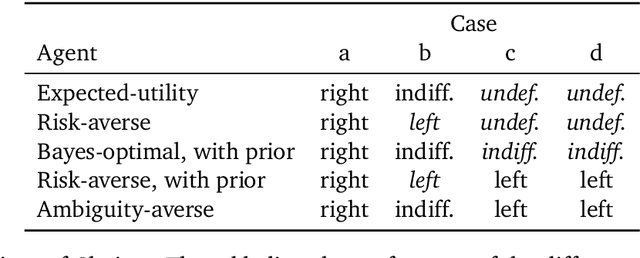

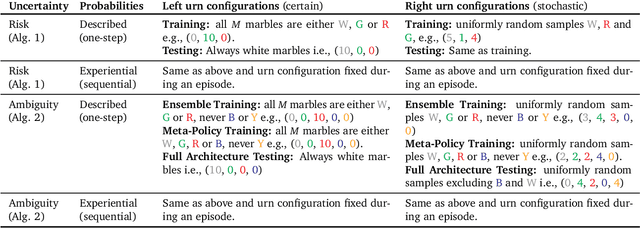
Meta-training agents with memory has been shown to culminate in Bayes-optimal agents, which casts Bayes-optimality as the implicit solution to a numerical optimization problem rather than an explicit modeling assumption. Bayes-optimal agents are risk-neutral, since they solely attune to the expected return, and ambiguity-neutral, since they act in new situations as if the uncertainty were known. This is in contrast to risk-sensitive agents, which additionally exploit the higher-order moments of the return, and ambiguity-sensitive agents, which act differently when recognizing situations in which they lack knowledge. Humans are also known to be averse to ambiguity and sensitive to risk in ways that aren't Bayes-optimal, indicating that such sensitivity can confer advantages, especially in safety-critical situations. How can we extend the meta-learning protocol to generate risk- and ambiguity-sensitive agents? The goal of this work is to fill this gap in the literature by showing that risk- and ambiguity-sensitivity also emerge as the result of an optimization problem using modified meta-training algorithms, which manipulate the experience-generation process of the learner. We empirically test our proposed meta-training algorithms on agents exposed to foundational classes of decision-making experiments and demonstrate that they become sensitive to risk and ambiguity.
Shaking the foundations: delusions in sequence models for interaction and control
Oct 20, 2021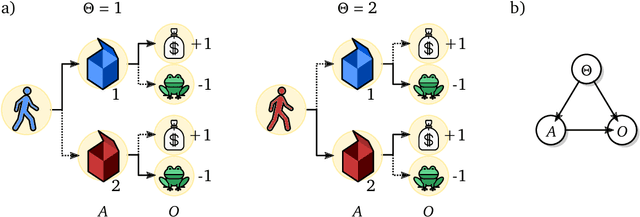
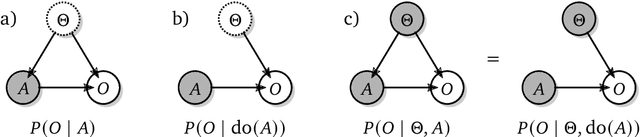
The recent phenomenal success of language models has reinvigorated machine learning research, and large sequence models such as transformers are being applied to a variety of domains. One important problem class that has remained relatively elusive however is purposeful adaptive behavior. Currently there is a common perception that sequence models "lack the understanding of the cause and effect of their actions" leading them to draw incorrect inferences due to auto-suggestive delusions. In this report we explain where this mismatch originates, and show that it can be resolved by treating actions as causal interventions. Finally, we show that in supervised learning, one can teach a system to condition or intervene on data by training with factual and counterfactual error signals respectively.
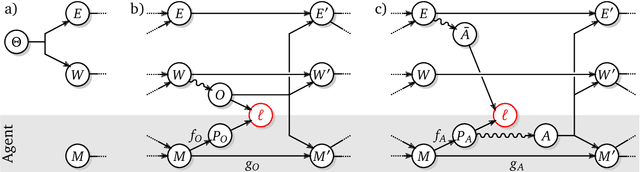
Reinforcement Learning with Information-Theoretic Actuation
Sep 30, 2021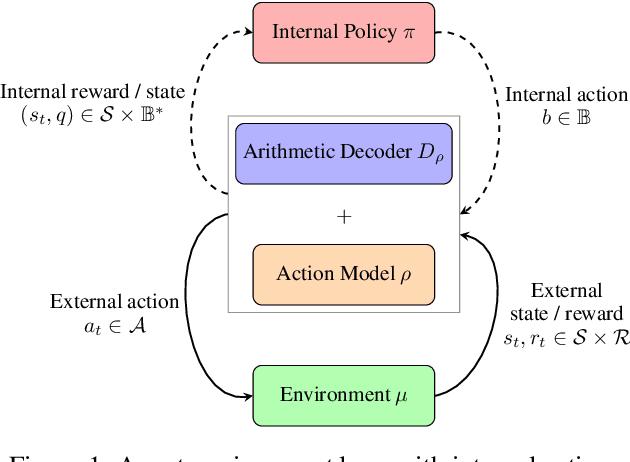
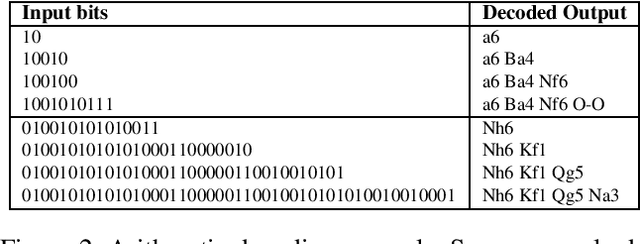
Reinforcement Learning formalises an embodied agent's interaction with the environment through observations, rewards and actions. But where do the actions come from? Actions are often considered to represent something external, such as the movement of a limb, a chess piece, or more generally, the output of an actuator. In this work we explore and formalize a contrasting view, namely that actions are best thought of as the output of a sequence of internal choices with respect to an action model. This view is particularly well-suited for leveraging the recent advances in large sequence models as prior knowledge for multi-task reinforcement learning problems. Our main contribution in this work is to show how to augment the standard MDP formalism with a sequential notion of internal action using information-theoretic techniques, and that this leads to self-consistent definitions of both internal and external action value functions.
A Combinatorial Perspective on Transfer Learning
Oct 23, 2020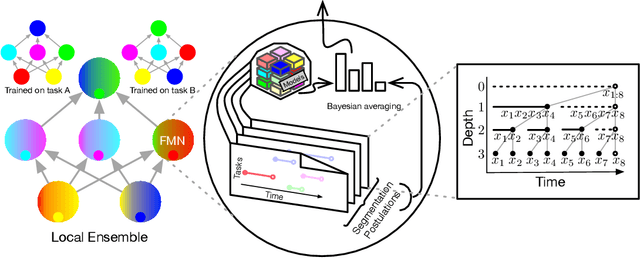
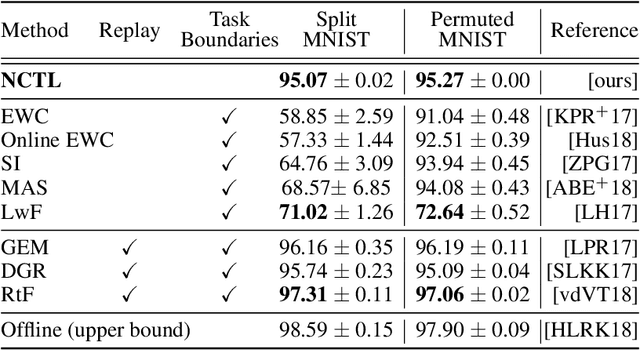
Human intelligence is characterized not only by the capacity to learn complex skills, but the ability to rapidly adapt and acquire new skills within an ever-changing environment. In this work we study how the learning of modular solutions can allow for effective generalization to both unseen and potentially differently distributed data. Our main postulate is that the combination of task segmentation, modular learning and memory-based ensembling can give rise to generalization on an exponentially growing number of unseen tasks. We provide a concrete instantiation of this idea using a combination of: (1) the Forget-Me-Not Process, for task segmentation and memory based ensembling; and (2) Gated Linear Networks, which in contrast to contemporary deep learning techniques use a modular and local learning mechanism. We demonstrate that this system exhibits a number of desirable continual learning properties: robustness to catastrophic forgetting, no negative transfer and increasing levels of positive transfer as more tasks are seen. We show competitive performance against both offline and online methods on standard continual learning benchmarks.