 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGATS: Gather-Attend-Scatter
Jan 16, 2024As the AI community increasingly adopts large-scale models, it is crucial to develop general and flexible tools to integrate them. We introduce Gather-Attend-Scatter (GATS), a novel module that enables seamless combination of pretrained foundation models, both trainable and frozen, into larger multimodal networks. GATS empowers AI systems to process and generate information across multiple modalities at different rates. In contrast to traditional fine-tuning, GATS allows for the original component models to remain frozen, avoiding the risk of them losing important knowledge acquired during the pretraining phase. We demonstrate the utility and versatility of GATS with a few experiments across games, robotics, and multimodal input-output systems.
A Generalist Agent
May 19, 2022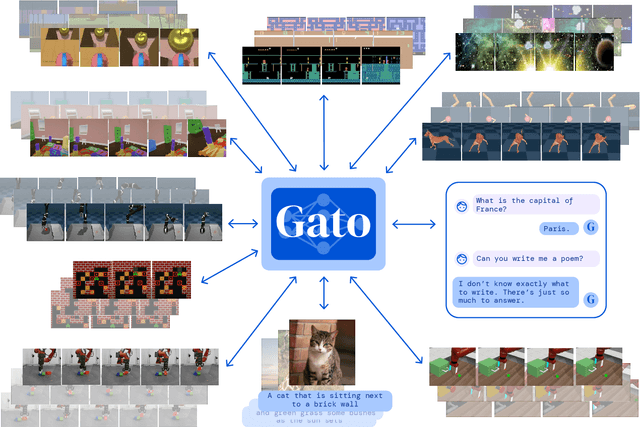
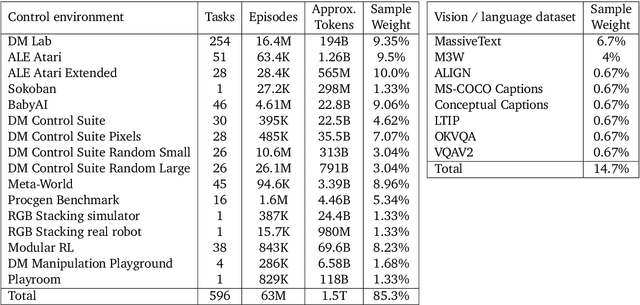
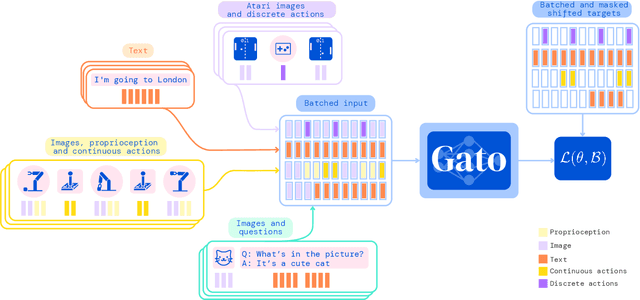

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
RL Unplugged: Benchmarks for Offline Reinforcement Learning
Jul 02, 2020
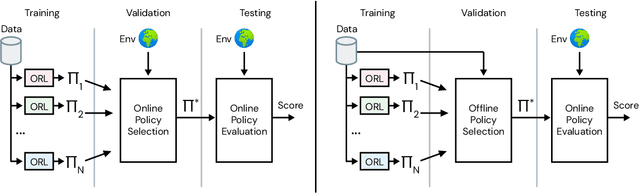
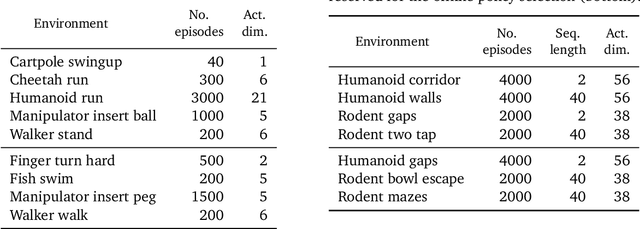
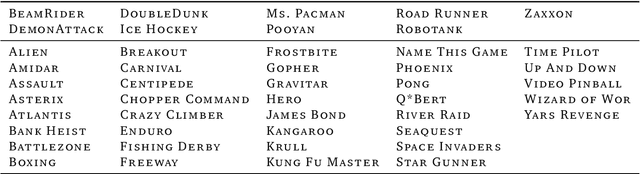
Offline methods for reinforcement learning have a potential to help bridge the gap between reinforcement learning research and real-world applications. They make it possible to learn policies from offline datasets, thus overcoming concerns associated with online data collection in the real-world, including cost, safety, or ethical concerns. In this paper, we propose a benchmark called RL Unplugged to evaluate and compare offline RL methods. RL Unplugged includes data from a diverse range of domains including games ({\em e.g.,} Atari benchmark) and simulated motor control problems ({\em e.g.,} DM Control Suite). The datasets include domains that are partially or fully observable, use continuous or discrete actions, and have stochastic vs. deterministic dynamics. We propose detailed evaluation protocols for each domain in RL Unplugged and provide an extensive analysis of supervised learning and offline RL methods using these protocols. We will release data for all our tasks and open-source all algorithms presented in this paper. We hope that our suite of benchmarks will increase the reproducibility of experiments and make it possible to study challenging tasks with a limited computational budget, thus making RL research both more systematic and more accessible across the community. Moving forward, we view RL Unplugged as a living benchmark suite that will evolve and grow with datasets contributed by the research community and ourselves. Our project page is available on github (https://git.io/JJUhd).
Learned Optimizers that Scale and Generalize
Sep 07, 2017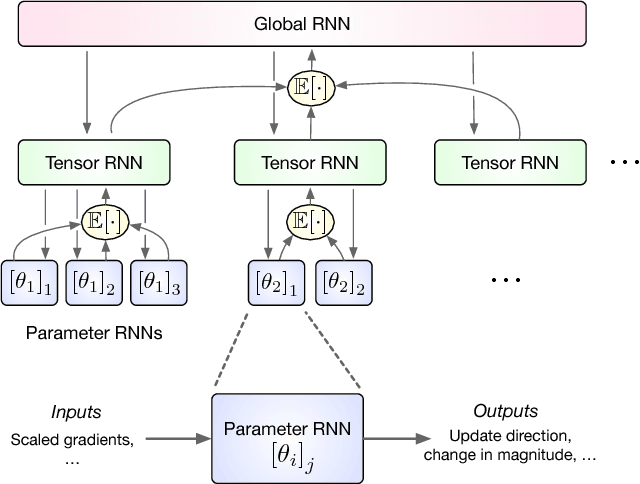
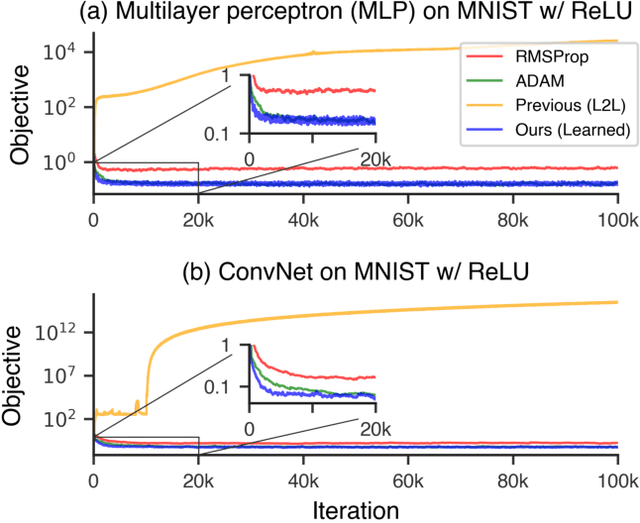
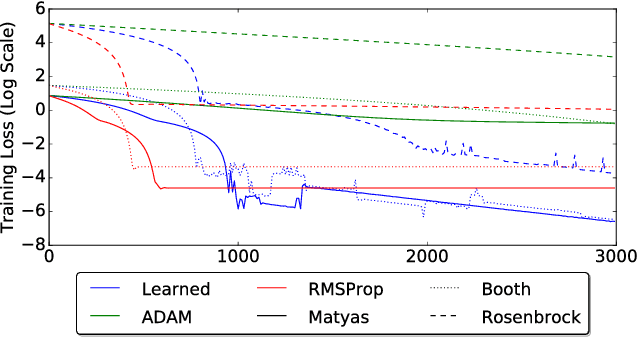
Learning to learn has emerged as an important direction for achieving artificial intelligence. Two of the primary barriers to its adoption are an inability to scale to larger problems and a limited ability to generalize to new tasks. We introduce a learned gradient descent optimizer that generalizes well to new tasks, and which has significantly reduced memory and computation overhead. We achieve this by introducing a novel hierarchical RNN architecture, with minimal per-parameter overhead, augmented with additional architectural features that mirror the known structure of optimization tasks. We also develop a meta-training ensemble of small, diverse optimization tasks capturing common properties of loss landscapes. The optimizer learns to outperform RMSProp/ADAM on problems in this corpus. More importantly, it performs comparably or better when applied to small convolutional neural networks, despite seeing no neural networks in its meta-training set. Finally, it generalizes to train Inception V3 and ResNet V2 architectures on the ImageNet dataset for thousands of steps, optimization problems that are of a vastly different scale than those it was trained on. We release an open source implementation of the meta-training algorithm.
Learning to Learn without Gradient Descent by Gradient Descent
Jun 12, 2017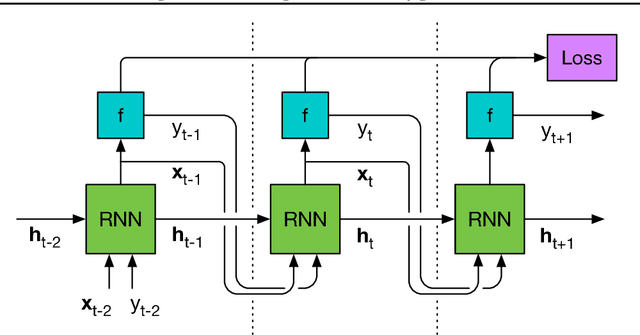
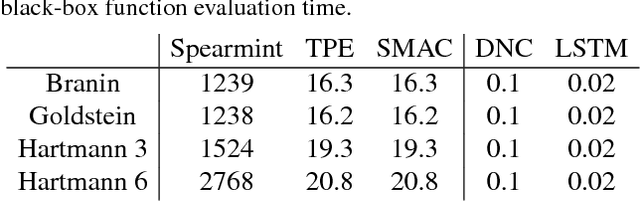
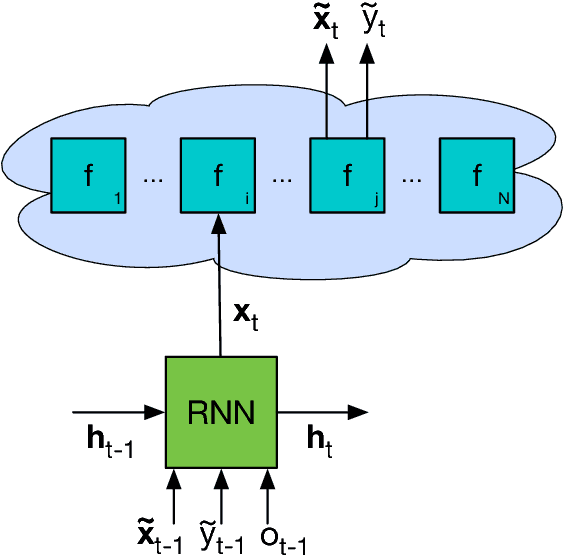
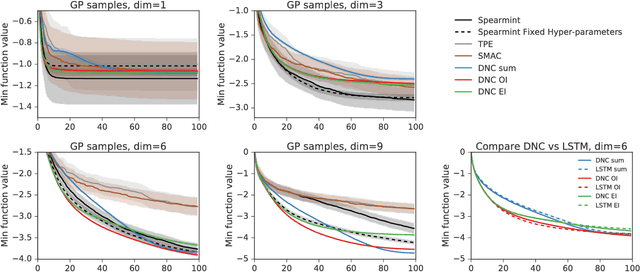
We learn recurrent neural network optimizers trained on simple synthetic functions by gradient descent. We show that these learned optimizers exhibit a remarkable degree of transfer in that they can be used to efficiently optimize a broad range of derivative-free black-box functions, including Gaussian process bandits, simple control objectives, global optimization benchmarks and hyper-parameter tuning tasks. Up to the training horizon, the learned optimizers learn to trade-off exploration and exploitation, and compare favourably with heavily engineered Bayesian optimization packages for hyper-parameter tuning.
Policy Distillation
Jan 07, 2016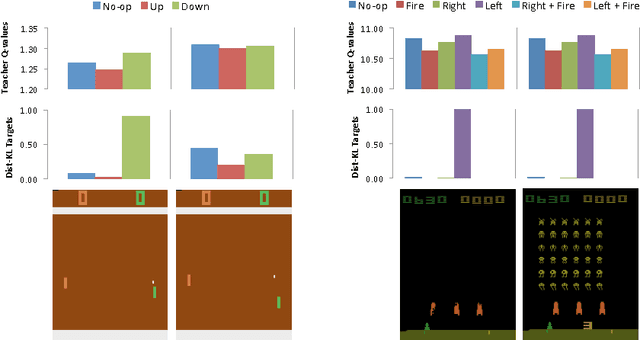
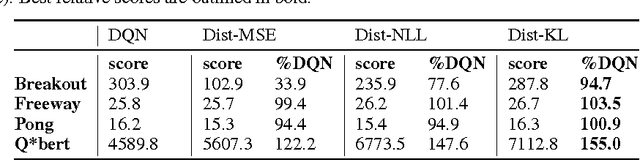
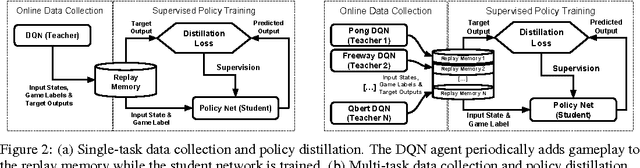
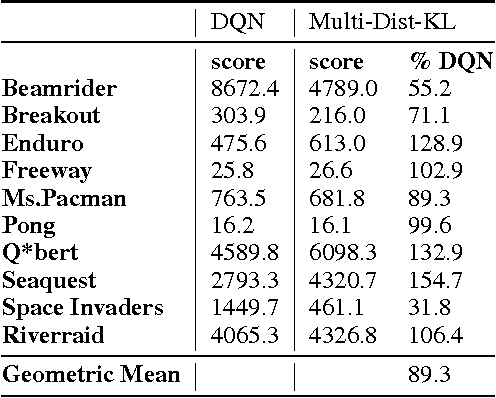
Policies for complex visual tasks have been successfully learned with deep reinforcement learning, using an approach called deep Q-networks (DQN), but relatively large (task-specific) networks and extensive training are needed to achieve good performance. In this work, we present a novel method called policy distillation that can be used to extract the policy of a reinforcement learning agent and train a new network that performs at the expert level while being dramatically smaller and more efficient. Furthermore, the same method can be used to consolidate multiple task-specific policies into a single policy. We demonstrate these claims using the Atari domain and show that the multi-task distilled agent outperforms the single-task teachers as well as a jointly-trained DQN agent.