 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Rethinking Evaluation Practices in Visual Question Answering: A Case Study on Out-of-Distribution Generalization
May 24, 2022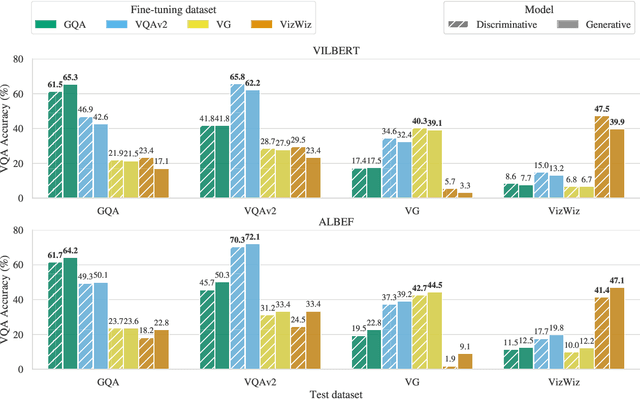
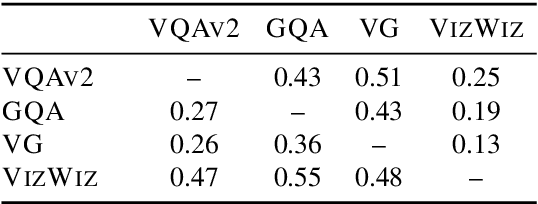
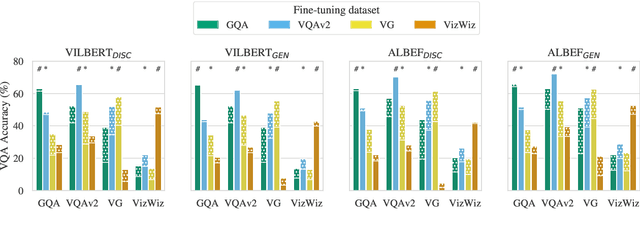
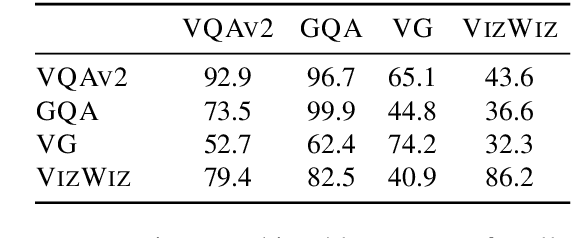
Vision-and-language (V&L) models pretrained on large-scale multimodal data have demonstrated strong performance on various tasks such as image captioning and visual question answering (VQA). The quality of such models is commonly assessed by measuring their performance on unseen data that typically comes from the same distribution as the training data. However, we observe that these models exhibit poor out-of-distribution (OOD) generalization on the task of VQA. To better understand the underlying causes of poor generalization, we comprehensively investigate performance of two pretrained V&L models under different settings (i.e. classification and open-ended text generation) by conducting cross-dataset evaluations. We find that these models tend to learn to solve the benchmark, rather than learning the high-level skills required by the VQA task. We also argue that in most cases generative models are less susceptible to shifts in data distribution, while frequently performing better on our tested benchmarks. Moreover, we find that multimodal pretraining improves OOD performance in most settings. Finally, we revisit assumptions underlying the use of automatic VQA evaluation metrics, and empirically show that their stringent nature repeatedly penalizes models for correct responses.
Learning how to Interact with a Complex Interface using Hierarchical Reinforcement Learning
Apr 21, 2022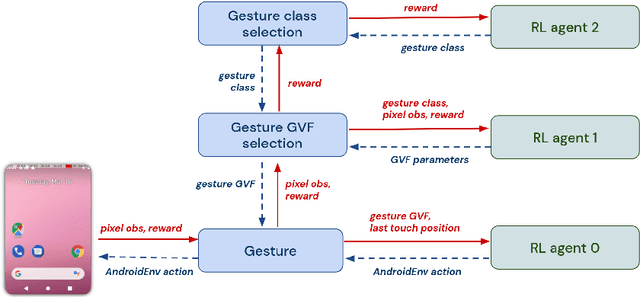
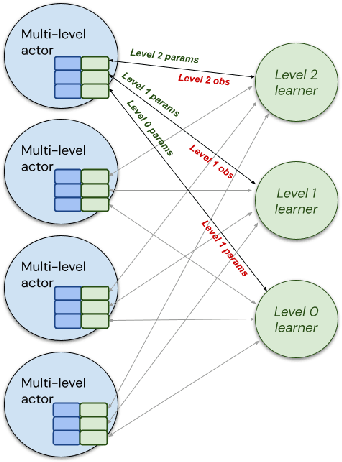
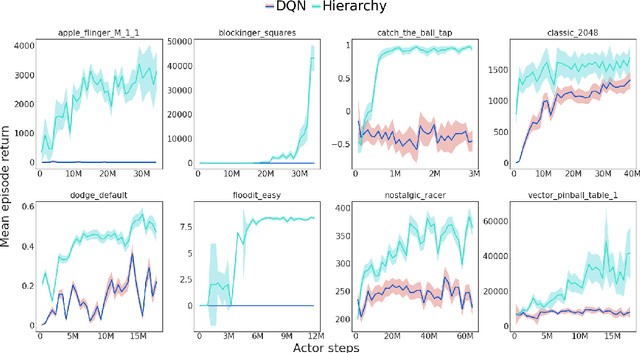
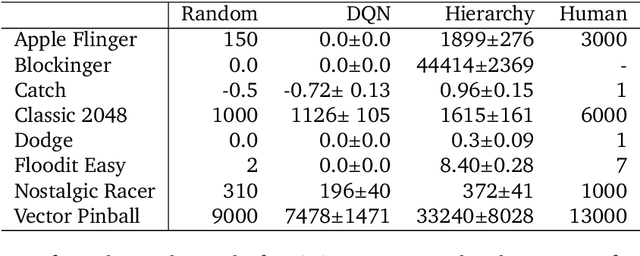
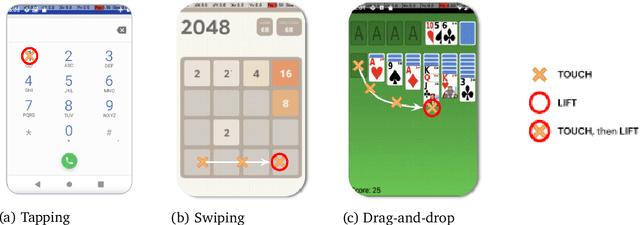
Hierarchical Reinforcement Learning (HRL) allows interactive agents to decompose complex problems into a hierarchy of sub-tasks. Higher-level tasks can invoke the solutions of lower-level tasks as if they were primitive actions. In this work, we study the utility of hierarchical decompositions for learning an appropriate way to interact with a complex interface. Specifically, we train HRL agents that can interface with applications in a simulated Android device. We introduce a Hierarchical Distributed Deep Reinforcement Learning architecture that learns (1) subtasks corresponding to simple finger gestures, and (2) how to combine these gestures to solve several Android tasks. Our approach relies on goal conditioning and can be used more generally to convert any base RL agent into an HRL agent. We use the AndroidEnv environment to evaluate our approach. For the experiments, the HRL agent uses a distributed version of the popular DQN algorithm to train different components of the hierarchy. While the native action space is completely intractable for simple DQN agents, our architecture can be used to establish an effective way to interact with different tasks, significantly improving the performance of the same DQN agent over different levels of abstraction.
RLDS: an Ecosystem to Generate, Share and Use Datasets in Reinforcement Learning
Nov 04, 2021



We introduce RLDS (Reinforcement Learning Datasets), an ecosystem for recording, replaying, manipulating, annotating and sharing data in the context of Sequential Decision Making (SDM) including Reinforcement Learning (RL), Learning from Demonstrations, Offline RL or Imitation Learning. RLDS enables not only reproducibility of existing research and easy generation of new datasets, but also accelerates novel research. By providing a standard and lossless format of datasets it enables to quickly test new algorithms on a wider range of tasks. The RLDS ecosystem makes it easy to share datasets without any loss of information and to be agnostic to the underlying original format when applying various data processing pipelines to large collections of datasets. Besides, RLDS provides tools for collecting data generated by either synthetic agents or humans, as well as for inspecting and manipulating the collected data. Ultimately, integration with TFDS facilitates the sharing of RL datasets with the research community.
AndroidEnv: A Reinforcement Learning Platform for Android
May 27, 2021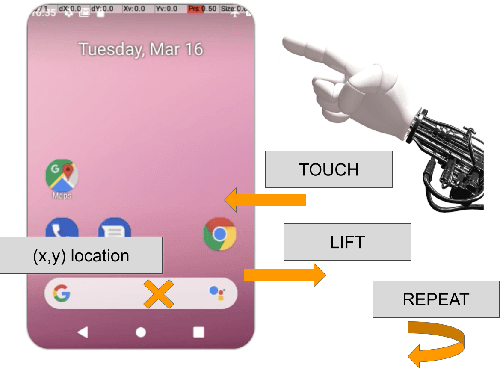
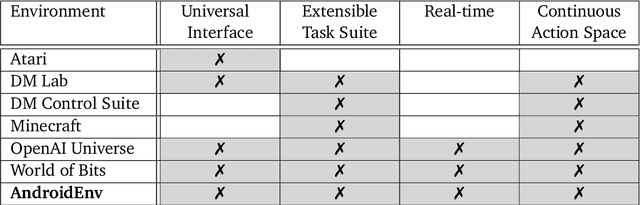
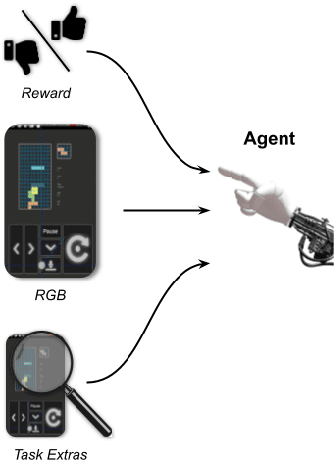
We introduce AndroidEnv, an open-source platform for Reinforcement Learning (RL) research built on top of the Android ecosystem. AndroidEnv allows RL agents to interact with a wide variety of apps and services commonly used by humans through a universal touchscreen interface. Since agents train on a realistic simulation of an Android device, they have the potential to be deployed on real devices. In this report, we give an overview of the environment, highlighting the significant features it provides for research, and we present an empirical evaluation of some popular reinforcement learning agents on a set of tasks built on this platform.