 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally Abstract Partial Models
Paper and Code
Aug 06, 2021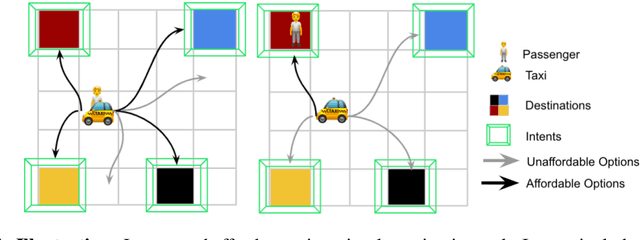

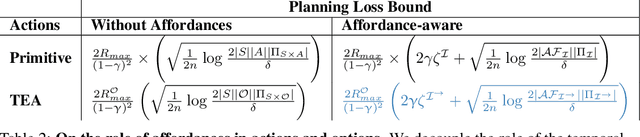
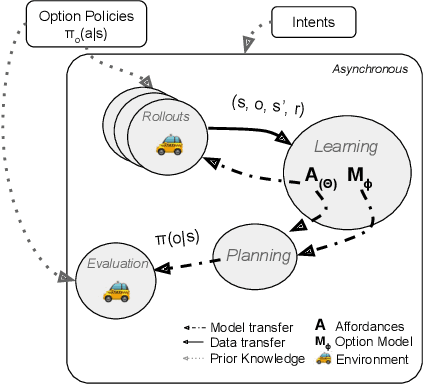
Humans and animals have the ability to reason and make predictions about different courses of action at many time scales. In reinforcement learning, option models (Sutton, Precup \& Singh, 1999; Precup, 2000) provide the framework for this kind of temporally abstract prediction and reasoning. Natural intelligent agents are also able to focus their attention on courses of action that are relevant or feasible in a given situation, sometimes termed affordable actions. In this paper, we define a notion of affordances for options, and develop temporally abstract partial option models, that take into account the fact that an option might be affordable only in certain situations. We analyze the trade-offs between estimation and approximation error in planning and learning when using such models, and identify some interesting special cases. Additionally, we demonstrate empirically the potential impact of partial option models on the efficiency of planning.