 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the role of planning in model-based deep reinforcement learning
Paper and Code
Nov 08, 2020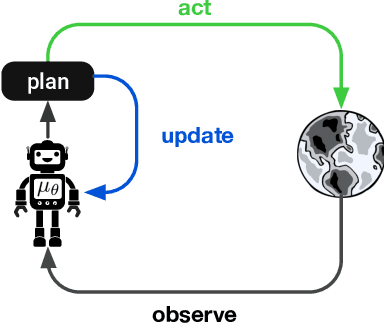
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.