 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Co-Mathematician: Accelerating Mathematicians with Agentic AI
May 07, 2026We introduce the AI co-mathematician, a workbench for mathematicians to interactively leverage AI agents to pursue open-ended research. The AI co-mathematician is optimized to provide holistic support for the exploratory and iterative reality of mathematical workflows, including ideation, literature search, computational exploration, theorem proving and theory building. By providing an asynchronous, stateful workspace that manages uncertainty, refines user intent, tracks failed hypotheses, and outputs native mathematical artifacts, the system mirrors human collaborative workflows. In early tests, the AI co-mathematician helped researchers solve open problems, identify new research directions, and uncover overlooked literature references. Besides demonstrating a highly interactive paradigm for AI-assisted mathematical discovery, the AI co-mathematician also achieves state of the art results on hard problem-solving benchmarks, including scoring 48% on FrontierMath Tier 4, a new high score among all AI systems evaluated.
Amplifying human performance in combinatorial competitive programming
Nov 29, 2024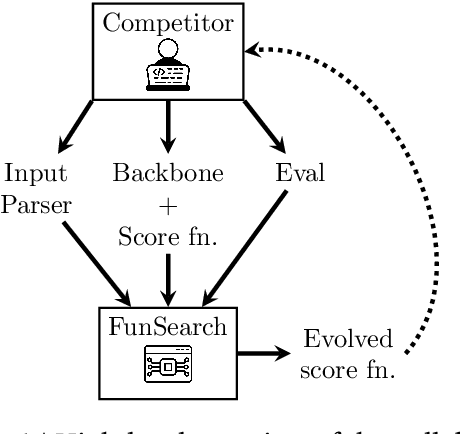
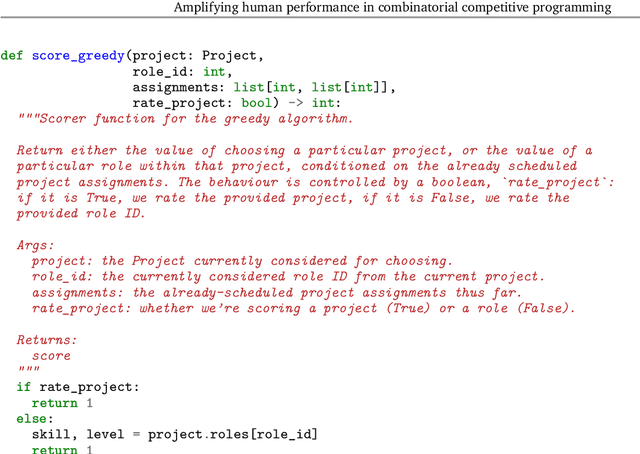
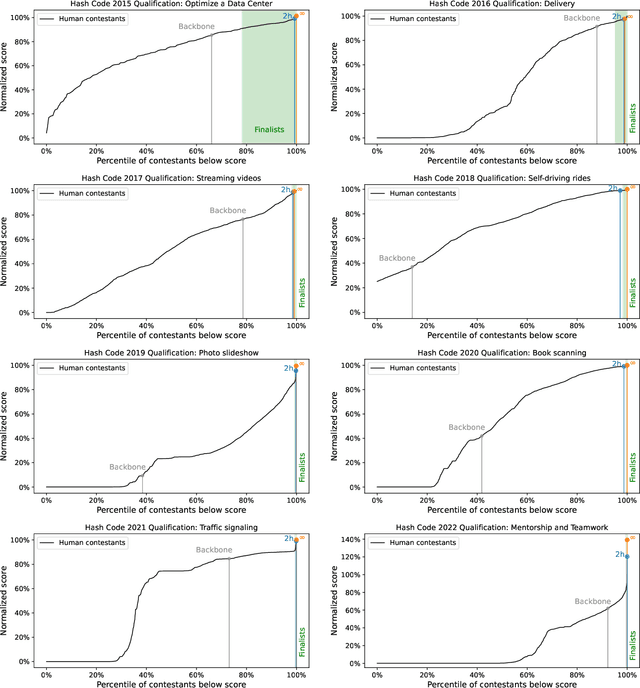
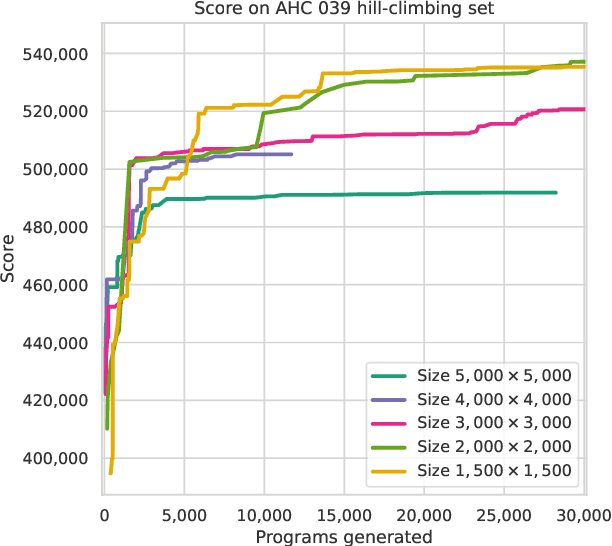
Recent years have seen a significant surge in complex AI systems for competitive programming, capable of performing at admirable levels against human competitors. While steady progress has been made, the highest percentiles still remain out of reach for these methods on standard competition platforms such as Codeforces. Here we instead focus on combinatorial competitive programming, where the target is to find as-good-as-possible solutions to otherwise computationally intractable problems, over specific given inputs. We hypothesise that this scenario offers a unique testbed for human-AI synergy, as human programmers can write a backbone of a heuristic solution, after which AI can be used to optimise the scoring function used by the heuristic. We deploy our approach on previous iterations of Hash Code, a global team programming competition inspired by NP-hard software engineering problems at Google, and we leverage FunSearch to evolve our scoring functions. Our evolved solutions significantly improve the attained scores from their baseline, successfully breaking into the top percentile on all previous Hash Code online qualification rounds, and outperforming the top human teams on several. Our method is also performant on an optimisation problem that featured in a recent held-out AtCoder contest.
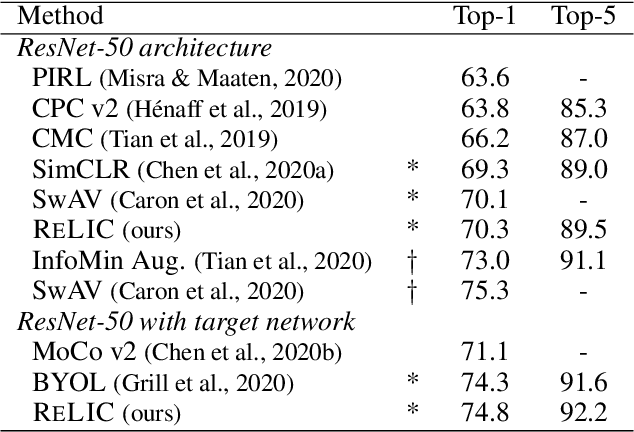
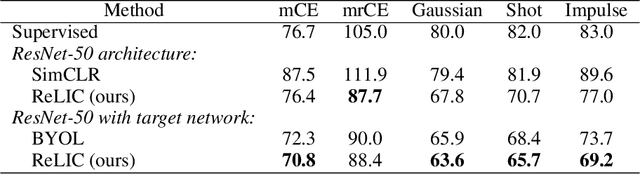
Pushing the limits of self-supervised ResNets: Can we outperform supervised learning without labels on ImageNet?
Jan 13, 2022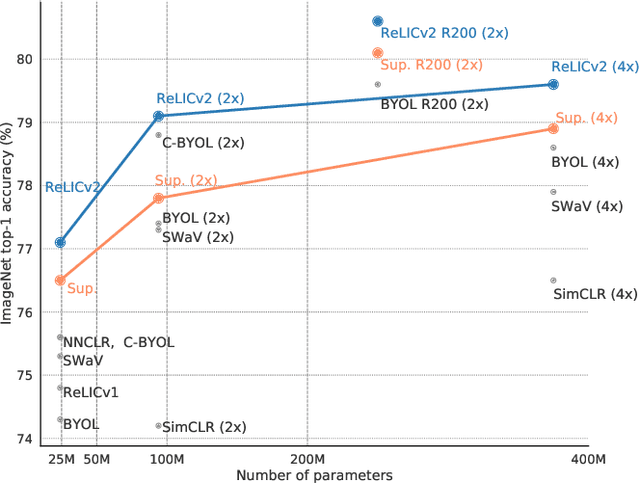
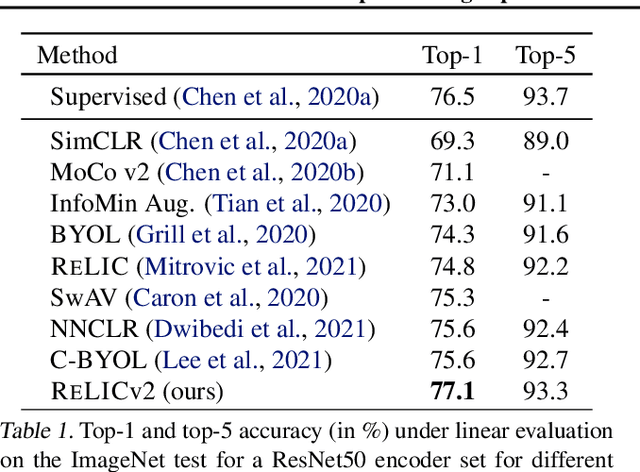
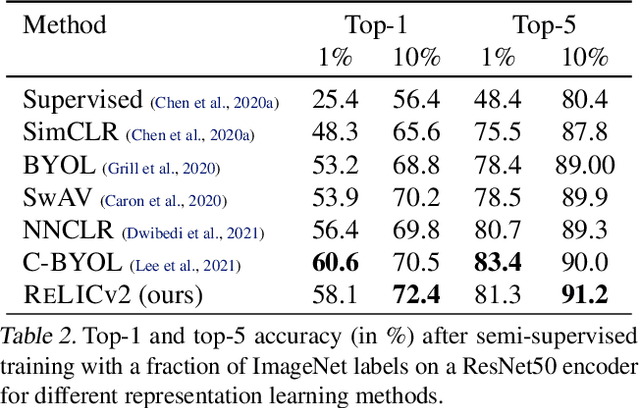
Despite recent progress made by self-supervised methods in representation learning with residual networks, they still underperform supervised learning on the ImageNet classification benchmark, limiting their applicability in performance-critical settings. Building on prior theoretical insights from Mitrovic et al., 2021, we propose ReLICv2 which combines an explicit invariance loss with a contrastive objective over a varied set of appropriately constructed data views. ReLICv2 achieves 77.1% top-1 classification accuracy on ImageNet using linear evaluation with a ResNet50 architecture and 80.6% with larger ResNet models, outperforming previous state-of-the-art self-supervised approaches by a wide margin. Most notably, ReLICv2 is the first representation learning method to consistently outperform the supervised baseline in a like-for-like comparison using a range of standard ResNet architectures. Finally we show that despite using ResNet encoders, ReLICv2 is comparable to state-of-the-art self-supervised vision transformers.
Counterfactual Credit Assignment in Model-Free Reinforcement Learning
Nov 18, 2020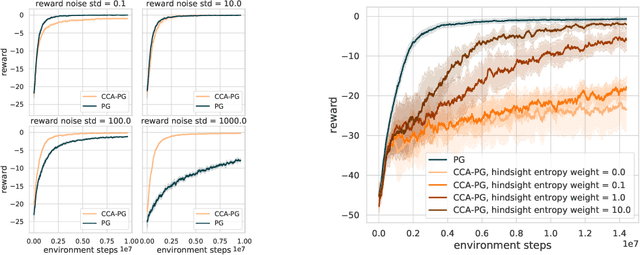
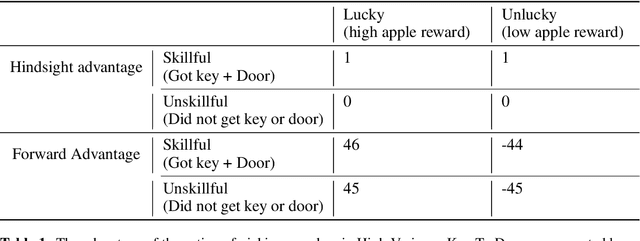
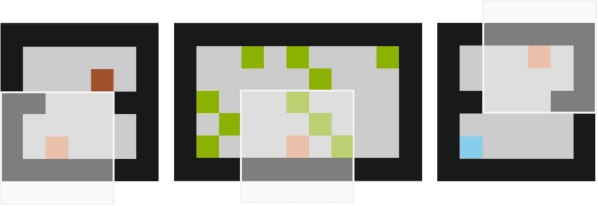
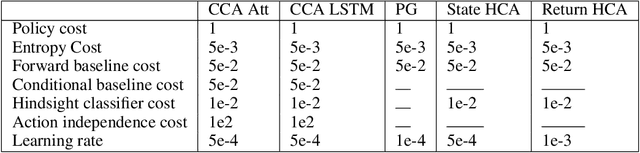
Credit assignment in reinforcement learning is the problem of measuring an action influence on future rewards. In particular, this requires separating skill from luck, ie. disentangling the effect of an action on rewards from that of external factors and subsequent actions. To achieve this, we adapt the notion of counterfactuals from causality theory to a model-free RL setup. The key idea is to condition value functions on future events, by learning to extract relevant information from a trajectory. We then propose to use these as future-conditional baselines and critics in policy gradient algorithms and we develop a valid, practical variant with provably lower variance, while achieving unbiasedness by constraining the hindsight information not to contain information about the agent actions. We demonstrate the efficacy and validity of our algorithm on a number of illustrative problems.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020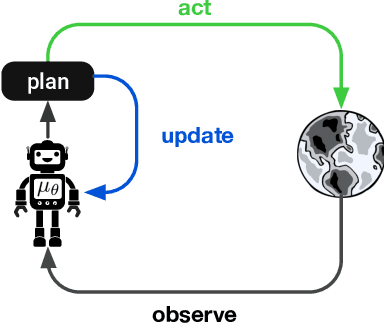
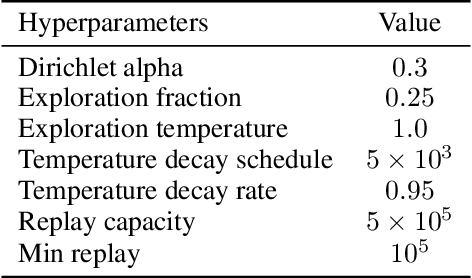
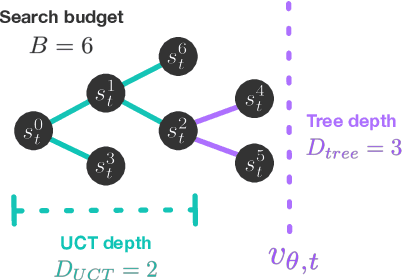
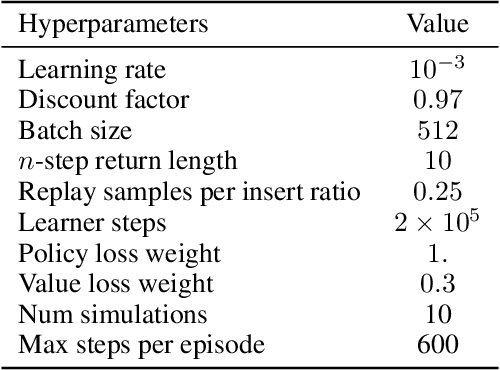
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.
Representation Learning via Invariant Causal Mechanisms
Oct 15, 2020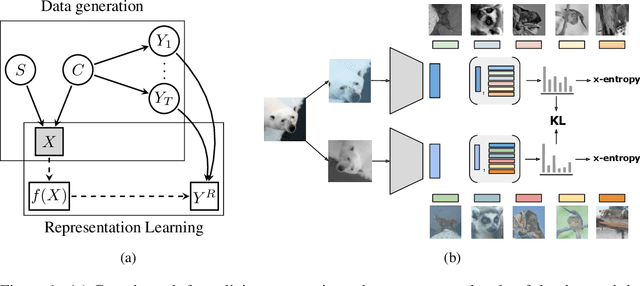
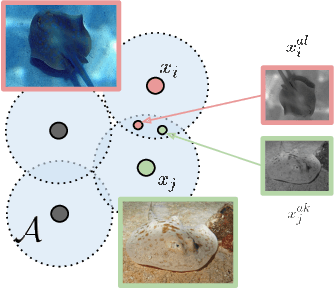
Self-supervised learning has emerged as a strategy to reduce the reliance on costly supervised signal by pretraining representations only using unlabeled data. These methods combine heuristic proxy classification tasks with data augmentations and have achieved significant success, but our theoretical understanding of this success remains limited. In this paper we analyze self-supervised representation learning using a causal framework. We show how data augmentations can be more effectively utilized through explicit invariance constraints on the proxy classifiers employed during pretraining. Based on this, we propose a novel self-supervised objective, Representation Learning via Invariant Causal Mechanisms (ReLIC), that enforces invariant prediction of proxy targets across augmentations through an invariance regularizer which yields improved generalization guarantees. Further, using causality we generalize contrastive learning, a particular kind of self-supervised method, and provide an alternative theoretical explanation for the success of these methods. Empirically, ReLIC significantly outperforms competing methods in terms of robustness and out-of-distribution generalization on ImageNet, while also significantly outperforming these methods on Atari achieving above human-level performance on $51$ out of $57$ games.
Beyond Tabula-Rasa: a Modular Reinforcement Learning Approach for Physically Embedded 3D Sokoban
Oct 03, 2020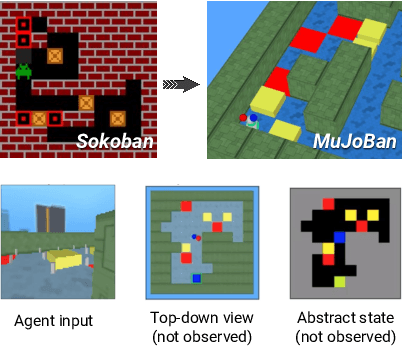
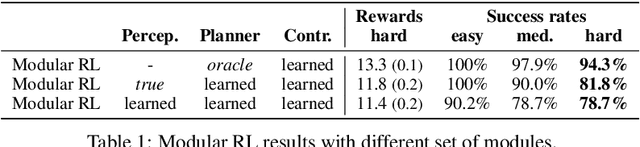

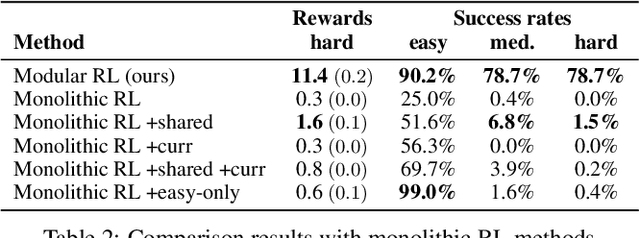
Intelligent robots need to achieve abstract objectives using concrete, spatiotemporally complex sensory information and motor control. Tabula rasa deep reinforcement learning (RL) has tackled demanding tasks in terms of either visual, abstract, or physical reasoning, but solving these jointly remains a formidable challenge. One recent, unsolved benchmark task that integrates these challenges is Mujoban, where a robot needs to arrange 3D warehouses generated from 2D Sokoban puzzles. We explore whether integrated tasks like Mujoban can be solved by composing RL modules together in a sense-plan-act hierarchy, where modules have well-defined roles similarly to classic robot architectures. Unlike classic architectures that are typically model-based, we use only model-free modules trained with RL or supervised learning. We find that our modular RL approach dramatically outperforms the state-of-the-art monolithic RL agent on Mujoban. Further, learned modules can be reused when, e.g., using a different robot platform to solve the same task. Together our results give strong evidence for the importance of research into modular RL designs. Project website: https://sites.google.com/view/modular-rl/
Physically Embedded Planning Problems: New Challenges for Reinforcement Learning
Sep 11, 2020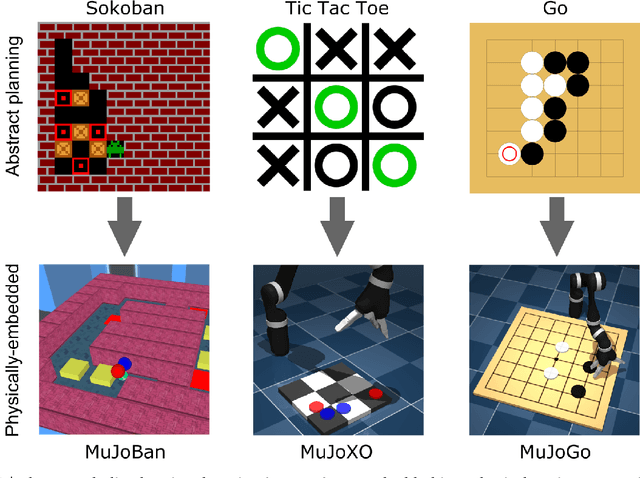

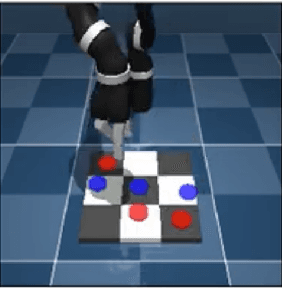
Recent work in deep reinforcement learning (RL) has produced algorithms capable of mastering challenging games such as Go, chess, or shogi. In these works the RL agent directly observes the natural state of the game and controls that state directly with its actions. However, when humans play such games, they do not just reason about the moves but also interact with their physical environment. They understand the state of the game by looking at the physical board in front of them and modify it by manipulating pieces using touch and fine-grained motor control. Mastering complicated physical systems with abstract goals is a central challenge for artificial intelligence, but it remains out of reach for existing RL algorithms. To encourage progress towards this goal we introduce a set of physically embedded planning problems and make them publicly available. We embed challenging symbolic tasks (Sokoban, tic-tac-toe, and Go) in a physics engine to produce a set of tasks that require perception, reasoning, and motor control over long time horizons. Although existing RL algorithms can tackle the symbolic versions of these tasks, we find that they struggle to master even the simplest of their physically embedded counterparts. As a first step towards characterizing the space of solution to these tasks, we introduce a strong baseline that uses a pre-trained expert game player to provide hints in the abstract space to an RL agent's policy while training it on the full sensorimotor control task. The resulting agent solves many of the tasks, underlining the need for methods that bridge the gap between abstract planning and embodied control.
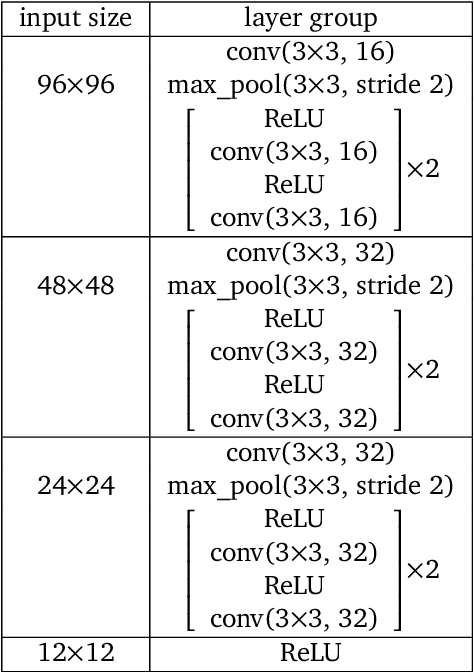
Pointer Graph Networks
Jun 11, 2020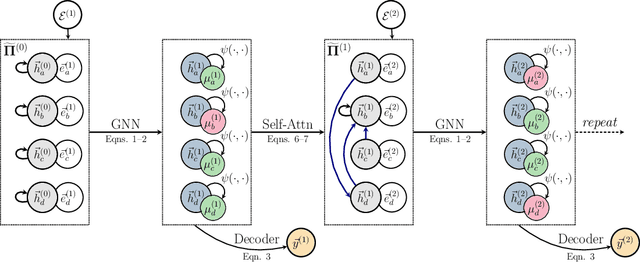
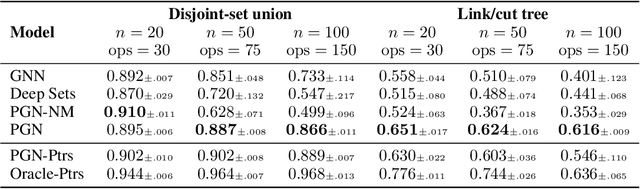
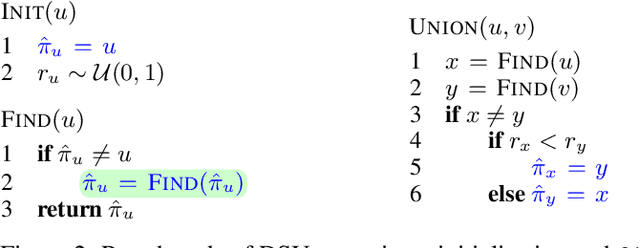
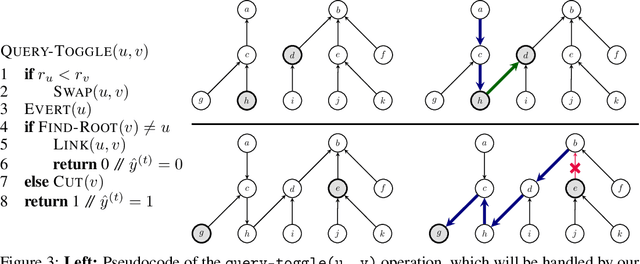
Graph neural networks (GNNs) are typically applied to static graphs that are assumed to be known upfront. This static input structure is often informed purely by insight of the machine learning practitioner, and might not be optimal for the actual task the GNN is solving. In absence of reliable domain expertise, one might resort to inferring the latent graph structure, which is often difficult due to the vast search space of possible graphs. Here we introduce Pointer Graph Networks (PGNs) which augment sets or graphs with additional inferred edges for improved model expressivity. PGNs allow each node to dynamically point to another node, followed by message passing over these pointers. The sparsity of this adaptable graph structure makes learning tractable while still being sufficiently expressive to simulate complex algorithms. Critically, the pointing mechanism is directly supervised to model long-term sequences of operations on classical data structures, incorporating useful structural inductive biases from theoretical computer science. Qualitatively, we demonstrate that PGNs can learn parallelisable variants of pointer-based data structures, namely disjoint set unions and link/cut trees. PGNs generalise out-of-distribution to 5x larger test inputs on dynamic graph connectivity tasks, outperforming unrestricted GNNs and Deep Sets.
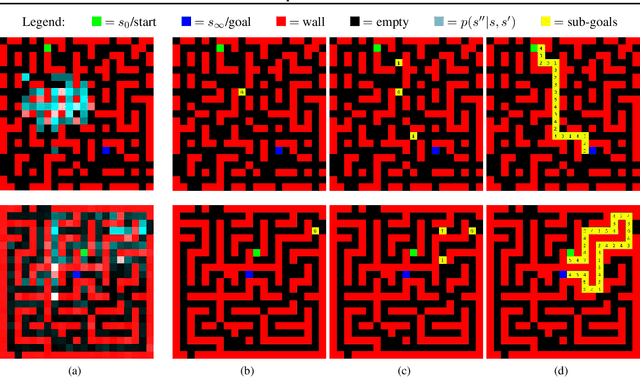
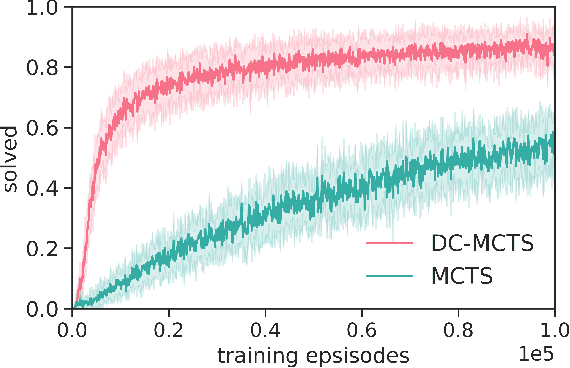
Divide-and-Conquer Monte Carlo Tree Search For Goal-Directed Planning
Apr 23, 2020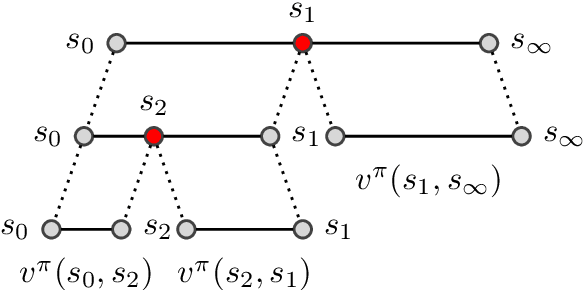
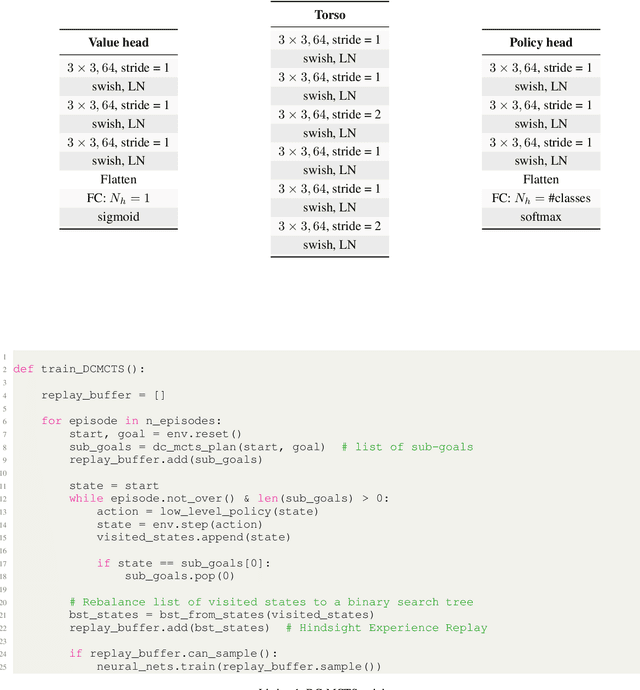
Standard planners for sequential decision making (including Monte Carlo planning, tree search, dynamic programming, etc.) are constrained by an implicit sequential planning assumption: The order in which a plan is constructed is the same in which it is executed. We consider alternatives to this assumption for the class of goal-directed Reinforcement Learning (RL) problems. Instead of an environment transition model, we assume an imperfect, goal-directed policy. This low-level policy can be improved by a plan, consisting of an appropriate sequence of sub-goals that guide it from the start to the goal state. We propose a planning algorithm, Divide-and-Conquer Monte Carlo Tree Search (DC-MCTS), for approximating the optimal plan by means of proposing intermediate sub-goals which hierarchically partition the initial tasks into simpler ones that are then solved independently and recursively. The algorithm critically makes use of a learned sub-goal proposal for finding appropriate partitions trees of new tasks based on prior experience. Different strategies for learning sub-goal proposals give rise to different planning strategies that strictly generalize sequential planning. We show that this algorithmic flexibility over planning order leads to improved results in navigation tasks in grid-worlds as well as in challenging continuous control environments.