 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Vision-Language Models as a Source of Rewards
Dec 14, 2023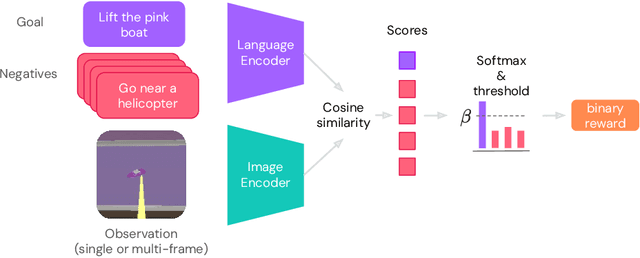
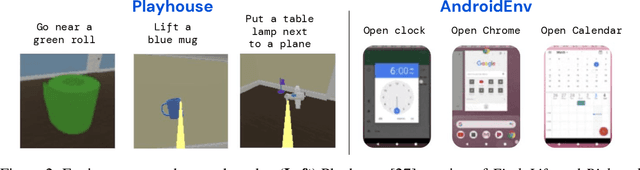
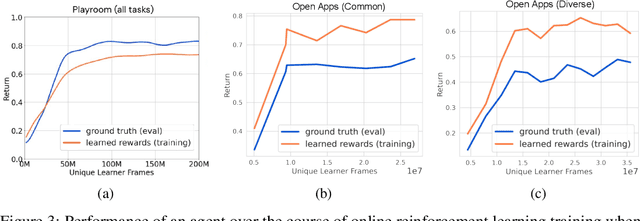
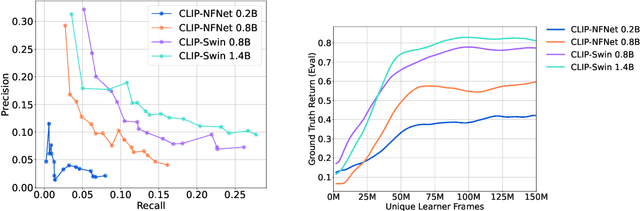
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
Predicting Ordinary Differential Equations with Transformers
Jul 24, 2023We develop a transformer-based sequence-to-sequence model that recovers scalar ordinary differential equations (ODEs) in symbolic form from irregularly sampled and noisy observations of a single solution trajectory. We demonstrate in extensive empirical evaluations that our model performs better or on par with existing methods in terms of accurate recovery across various settings. Moreover, our method is efficiently scalable: after one-time pretraining on a large set of ODEs, we can infer the governing law of a new observed solution in a few forward passes of the model.
Discovering ordinary differential equations that govern time-series
Nov 05, 2022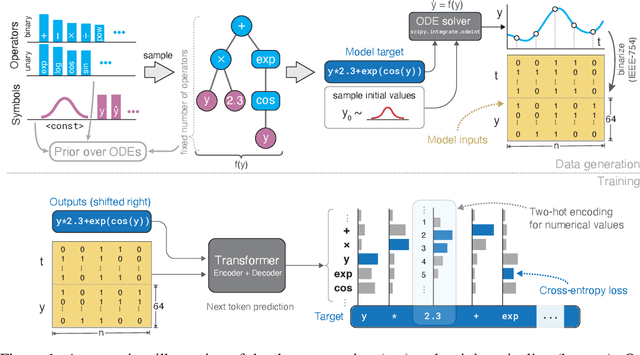
Natural laws are often described through differential equations yet finding a differential equation that describes the governing law underlying observed data is a challenging and still mostly manual task. In this paper we make a step towards the automation of this process: we propose a transformer-based sequence-to-sequence model that recovers scalar autonomous ordinary differential equations (ODEs) in symbolic form from time-series data of a single observed solution of the ODE. Our method is efficiently scalable: after one-time pretraining on a large set of ODEs, we can infer the governing laws of a new observed solution in a few forward passes of the model. Then we show that our model performs better or on par with existing methods in various test cases in terms of accurate symbolic recovery of the ODE, especially for more complex expressions.
Direct Advantage Estimation
Sep 13, 2021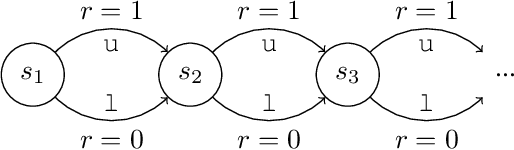
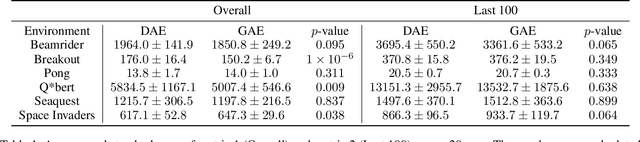
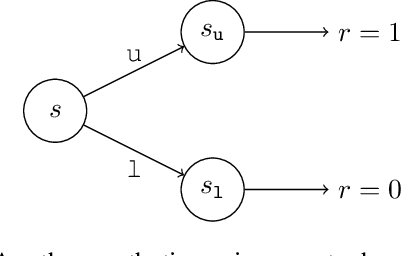
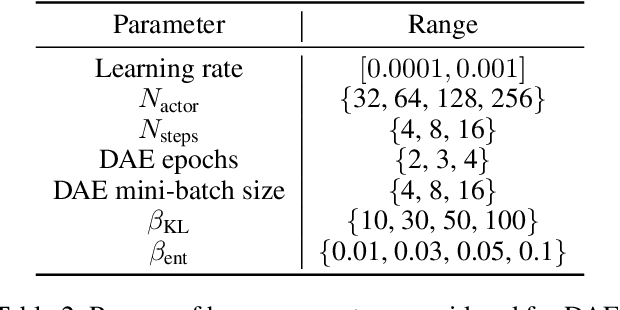
Credit assignment is one of the central problems in reinforcement learning. The predominant approach is to assign credit based on the expected return. However, we show that the expected return may depend on the policy in an undesirable way which could slow down learning. Instead, we borrow ideas from the causality literature and show that the advantage function can be interpreted as causal effects, which share similar properties with causal representations. Based on this insight, we propose the Direct Advantage Estimation (DAE), a novel method that can model the advantage function and estimate it directly from data without requiring the (action-)value function. If desired, value functions can also be seamlessly integrated into DAE and be updated in a similar way to Temporal Difference Learning. The proposed method is easy to implement and can be readily adopted by modern actor-critic methods. We test DAE empirically on the Atari domain and show that it can achieve competitive results with the state-of-the-art method for advantage estimation.
Neural Symbolic Regression that Scales
Jun 11, 2021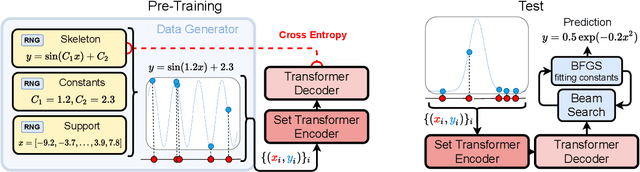
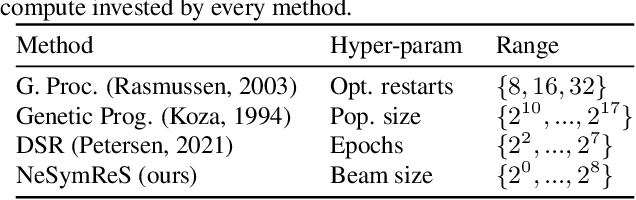
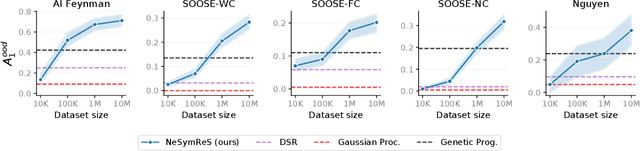
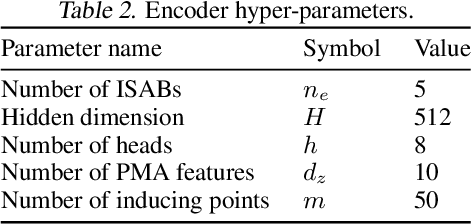
Symbolic equations are at the core of scientific discovery. The task of discovering the underlying equation from a set of input-output pairs is called symbolic regression. Traditionally, symbolic regression methods use hand-designed strategies that do not improve with experience. In this paper, we introduce the first symbolic regression method that leverages large scale pre-training. We procedurally generate an unbounded set of equations, and simultaneously pre-train a Transformer to predict the symbolic equation from a corresponding set of input-output-pairs. At test time, we query the model on a new set of points and use its output to guide the search for the equation. We show empirically that this approach can re-discover a set of well-known physical equations, and that it improves over time with more data and compute.
CausalWorld: A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
Oct 08, 2020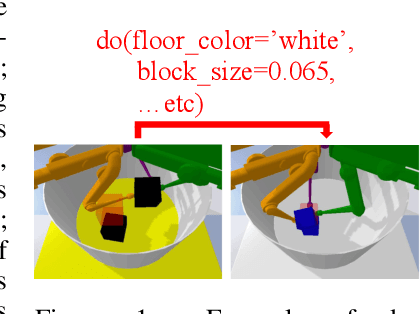
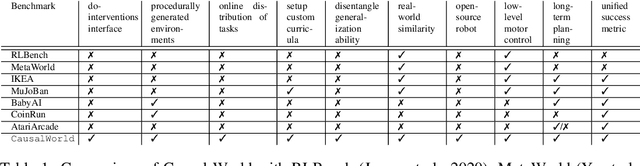
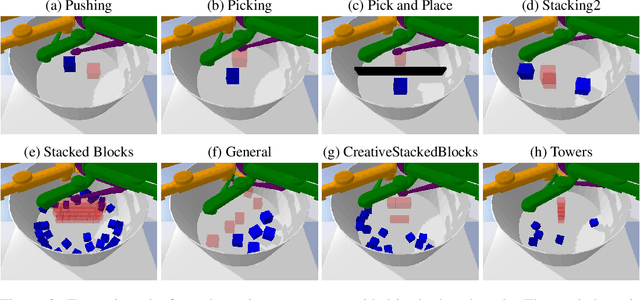
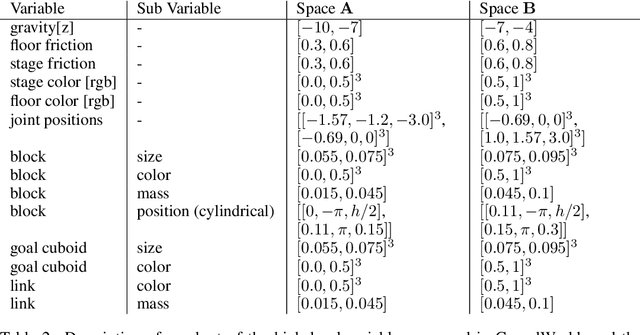
Despite recent successes of reinforcement learning (RL), it remains a challenge for agents to transfer learned skills to related environments. To facilitate research addressing this problem, we propose CausalWorld, a benchmark for causal structure and transfer learning in a robotic manipulation environment. The environment is a simulation of an open-source robotic platform, hence offering the possibility of sim-to-real transfer. Tasks consist of constructing 3D shapes from a given set of blocks - inspired by how children learn to build complex structures. The key strength of CausalWorld is that it provides a combinatorial family of such tasks with common causal structure and underlying factors (including, e.g., robot and object masses, colors, sizes). The user (or the agent) may intervene on all causal variables, which allows for fine-grained control over how similar different tasks (or task distributions) are. One can thus easily define training and evaluation distributions of a desired difficulty level, targeting a specific form of generalization (e.g., only changes in appearance or object mass). Further, this common parametrization facilitates defining curricula by interpolating between an initial and a target task. While users may define their own task distributions, we present eight meaningful distributions as concrete benchmarks, ranging from simple to very challenging, all of which require long-horizon planning as well as precise low-level motor control. Finally, we provide baseline results for a subset of these tasks on distinct training curricula and corresponding evaluation protocols, verifying the feasibility of the tasks in this benchmark.
Learning explanations that are hard to vary
Sep 05, 2020

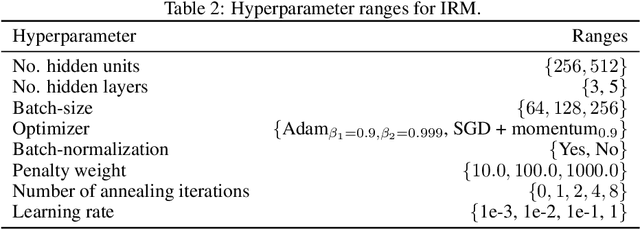
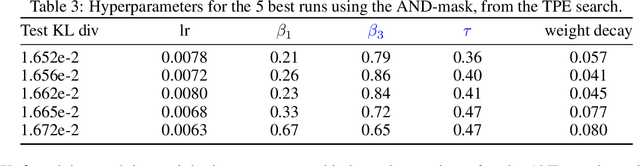
In this paper, we investigate the principle that `good explanations are hard to vary' in the context of deep learning. We show that averaging gradients across examples -- akin to a logical OR of patterns -- can favor memorization and `patchwork' solutions that sew together different strategies, instead of identifying invariances. To inspect this, we first formalize a notion of consistency for minima of the loss surface, which measures to what extent a minimum appears only when examples are pooled. We then propose and experimentally validate a simple alternative algorithm based on a logical AND, that focuses on invariances and prevents memorization in a set of real-world tasks. Finally, using a synthetic dataset with a clear distinction between invariant and spurious mechanisms, we dissect learning signals and compare this approach to well-established regularizers.