 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Embedded Planning Problems: New Challenges for Reinforcement Learning
Paper and Code
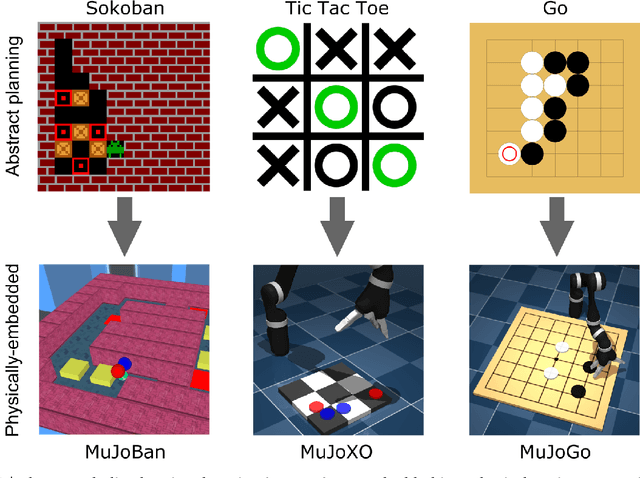

Recent work in deep reinforcement learning (RL) has produced algorithms capable of mastering challenging games such as Go, chess, or shogi. In these works the RL agent directly observes the natural state of the game and controls that state directly with its actions. However, when humans play such games, they do not just reason about the moves but also interact with their physical environment. They understand the state of the game by looking at the physical board in front of them and modify it by manipulating pieces using touch and fine-grained motor control. Mastering complicated physical systems with abstract goals is a central challenge for artificial intelligence, but it remains out of reach for existing RL algorithms. To encourage progress towards this goal we introduce a set of physically embedded planning problems and make them publicly available. We embed challenging symbolic tasks (Sokoban, tic-tac-toe, and Go) in a physics engine to produce a set of tasks that require perception, reasoning, and motor control over long time horizons. Although existing RL algorithms can tackle the symbolic versions of these tasks, we find that they struggle to master even the simplest of their physically embedded counterparts. As a first step towards characterizing the space of solution to these tasks, we introduce a strong baseline that uses a pre-trained expert game player to provide hints in the abstract space to an RL agent's policy while training it on the full sensorimotor control task. The resulting agent solves many of the tasks, underlining the need for methods that bridge the gap between abstract planning and embodied control.