 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Agents using Social Choice Theory
Dec 07, 2023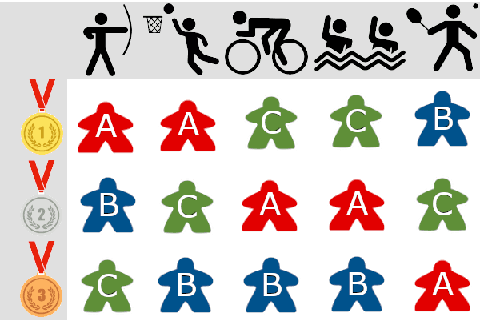

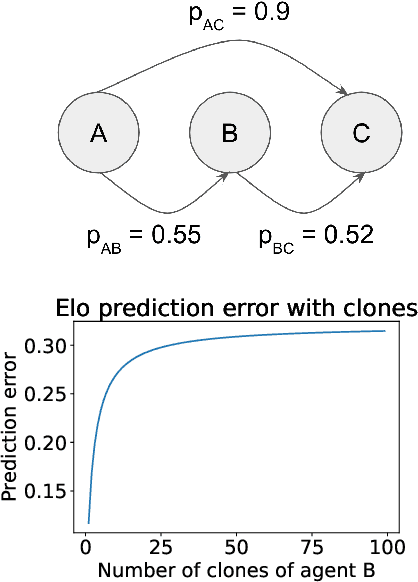

We argue that many general evaluation problems can be viewed through the lens of voting theory. Each task is interpreted as a separate voter, which requires only ordinal rankings or pairwise comparisons of agents to produce an overall evaluation. By viewing the aggregator as a social welfare function, we are able to leverage centuries of research in social choice theory to derive principled evaluation frameworks with axiomatic foundations. These evaluations are interpretable and flexible, while avoiding many of the problems currently facing cross-task evaluation. We apply this Voting-as-Evaluation (VasE) framework across multiple settings, including reinforcement learning, large language models, and humans. In practice, we observe that VasE can be more robust than popular evaluation frameworks (Elo and Nash averaging), discovers properties in the evaluation data not evident from scores alone, and can predict outcomes better than Elo in a complex seven-player game. We identify one particular approach, maximal lotteries, that satisfies important consistency properties relevant to evaluation, is computationally efficient (polynomial in the size of the evaluation data), and identifies game-theoretic cycles.
Heterogeneous Social Value Orientation Leads to Meaningful Diversity in Sequential Social Dilemmas
May 01, 2023



In social psychology, Social Value Orientation (SVO) describes an individual's propensity to allocate resources between themself and others. In reinforcement learning, SVO has been instantiated as an intrinsic motivation that remaps an agent's rewards based on particular target distributions of group reward. Prior studies show that groups of agents endowed with heterogeneous SVO learn diverse policies in settings that resemble the incentive structure of Prisoner's dilemma. Our work extends this body of results and demonstrates that (1) heterogeneous SVO leads to meaningfully diverse policies across a range of incentive structures in sequential social dilemmas, as measured by task-specific diversity metrics; and (2) learning a best response to such policy diversity leads to better zero-shot generalization in some situations. We show that these best-response agents learn policies that are conditioned on their co-players, which we posit is the reason for improved zero-shot generalization results.
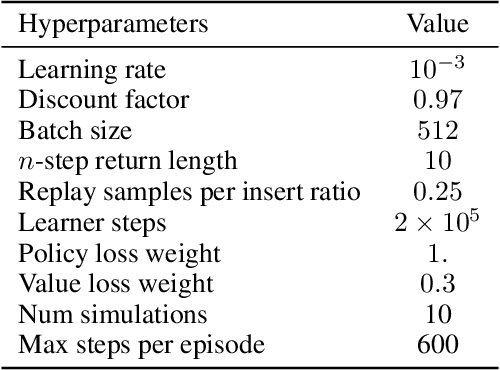
Population-based Evaluation in Repeated Rock-Paper-Scissors as a Benchmark for Multiagent Reinforcement Learning
Mar 02, 2023



Progress in fields of machine learning and adversarial planning has benefited significantly from benchmark domains, from checkers and the classic UCI data sets to Go and Diplomacy. In sequential decision-making, agent evaluation has largely been restricted to few interactions against experts, with the aim to reach some desired level of performance (e.g. beating a human professional player). We propose a benchmark for multiagent learning based on repeated play of the simple game Rock, Paper, Scissors along with a population of forty-three tournament entries, some of which are intentionally sub-optimal. We describe metrics to measure the quality of agents based both on average returns and exploitability. We then show that several RL, online learning, and language model approaches can learn good counter-strategies and generalize well, but ultimately lose to the top-performing bots, creating an opportunity for research in multiagent learning.
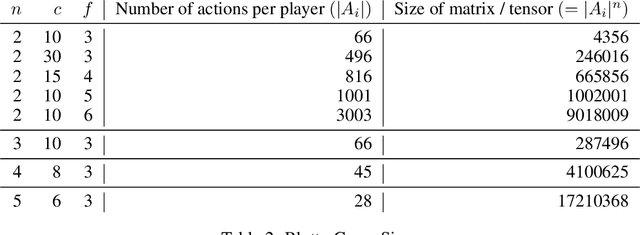
Turbocharging Solution Concepts: Solving NEs, CEs and CCEs with Neural Equilibrium Solvers
Oct 17, 2022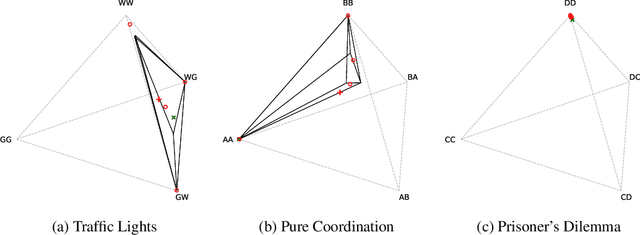
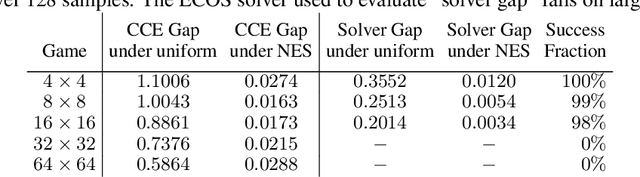

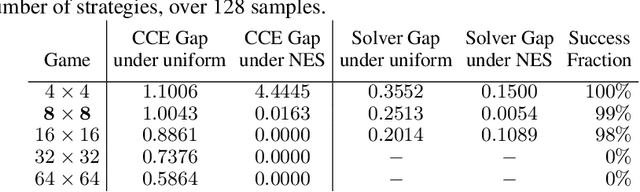
Solution concepts such as Nash Equilibria, Correlated Equilibria, and Coarse Correlated Equilibria are useful components for many multiagent machine learning algorithms. Unfortunately, solving a normal-form game could take prohibitive or non-deterministic time to converge, and could fail. We introduce the Neural Equilibrium Solver which utilizes a special equivariant neural network architecture to approximately solve the space of all games of fixed shape, buying speed and determinism. We define a flexible equilibrium selection framework, that is capable of uniquely selecting an equilibrium that minimizes relative entropy, or maximizes welfare. The network is trained without needing to generate any supervised training data. We show remarkable zero-shot generalization to larger games. We argue that such a network is a powerful component for many possible multiagent algorithms.
Developing, Evaluating and Scaling Learning Agents in Multi-Agent Environments
Sep 22, 2022The Game Theory & Multi-Agent team at DeepMind studies several aspects of multi-agent learning ranging from computing approximations to fundamental concepts in game theory to simulating social dilemmas in rich spatial environments and training 3-d humanoids in difficult team coordination tasks. A signature aim of our group is to use the resources and expertise made available to us at DeepMind in deep reinforcement learning to explore multi-agent systems in complex environments and use these benchmarks to advance our understanding. Here, we summarise the recent work of our team and present a taxonomy that we feel highlights many important open challenges in multi-agent research.
Mastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
Jun 30, 2022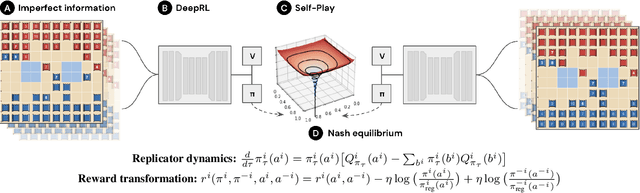
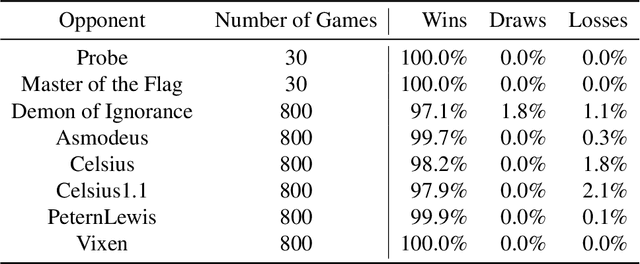
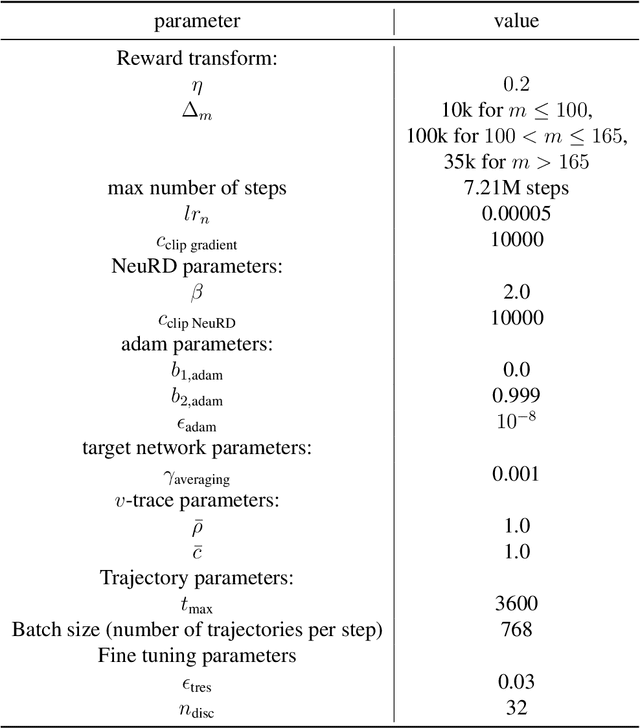
We introduce DeepNash, an autonomous agent capable of learning to play the imperfect information game Stratego from scratch, up to a human expert level. Stratego is one of the few iconic board games that Artificial Intelligence (AI) has not yet mastered. This popular game has an enormous game tree on the order of $10^{535}$ nodes, i.e., $10^{175}$ times larger than that of Go. It has the additional complexity of requiring decision-making under imperfect information, similar to Texas hold'em poker, which has a significantly smaller game tree (on the order of $10^{164}$ nodes). Decisions in Stratego are made over a large number of discrete actions with no obvious link between action and outcome. Episodes are long, with often hundreds of moves before a player wins, and situations in Stratego can not easily be broken down into manageably-sized sub-problems as in poker. For these reasons, Stratego has been a grand challenge for the field of AI for decades, and existing AI methods barely reach an amateur level of play. DeepNash uses a game-theoretic, model-free deep reinforcement learning method, without search, that learns to master Stratego via self-play. The Regularised Nash Dynamics (R-NaD) algorithm, a key component of DeepNash, converges to an approximate Nash equilibrium, instead of 'cycling' around it, by directly modifying the underlying multi-agent learning dynamics. DeepNash beats existing state-of-the-art AI methods in Stratego and achieved a yearly (2022) and all-time top-3 rank on the Gravon games platform, competing with human expert players.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020
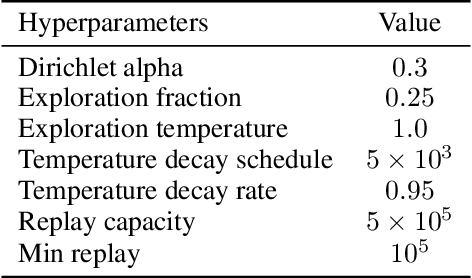
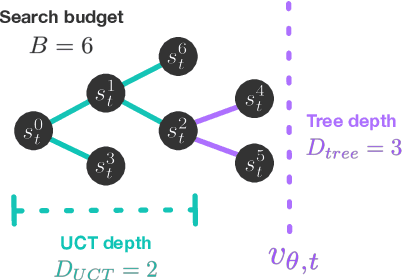
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.
Learning to Play No-Press Diplomacy with Best Response Policy Iteration
Jun 17, 2020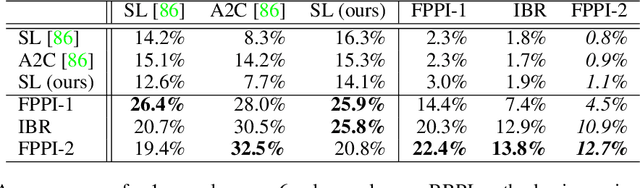
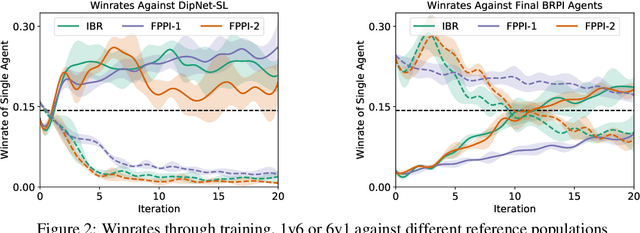
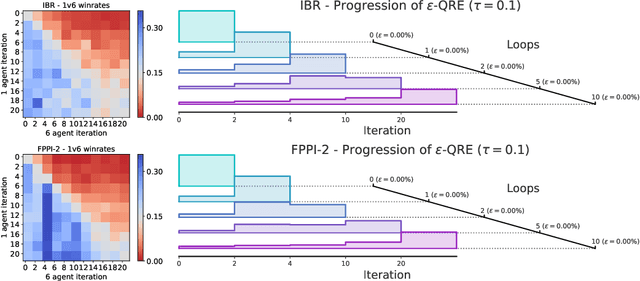
Recent advances in deep reinforcement learning (RL) have led to considerable progress in many 2-player zero-sum games, such as Go, Poker and Starcraft. The purely adversarial nature of such games allows for conceptually simple and principled application of RL methods. However real-world settings are many-agent, and agent interactions are complex mixtures of common-interest and competitive aspects. We consider Diplomacy, a 7-player board game designed to accentuate dilemmas resulting from many-agent interactions. It also features a large combinatorial action space and simultaneous moves, which are challenging for RL algorithms. We propose a simple yet effective approximate best response operator, designed to handle large combinatorial action spaces and simultaneous moves. We also introduce a family of policy iteration methods that approximate fictitious play. With these methods, we successfully apply RL to Diplomacy: we show that our agents convincingly outperform the previous state-of-the-art, and game theoretic equilibrium analysis shows that the new process yields consistent improvements.
From Poincaré Recurrence to Convergence in Imperfect Information Games: Finding Equilibrium via Regularization
Feb 19, 2020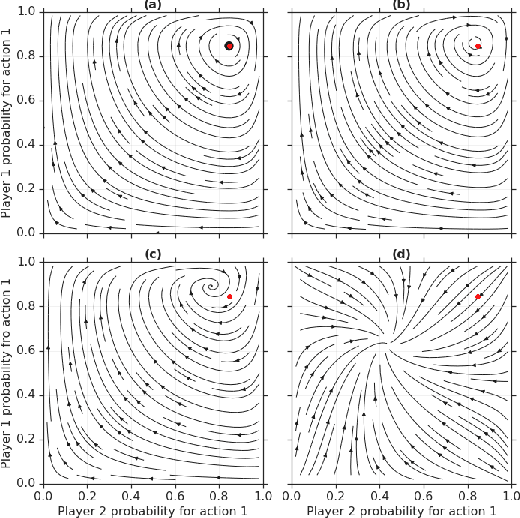
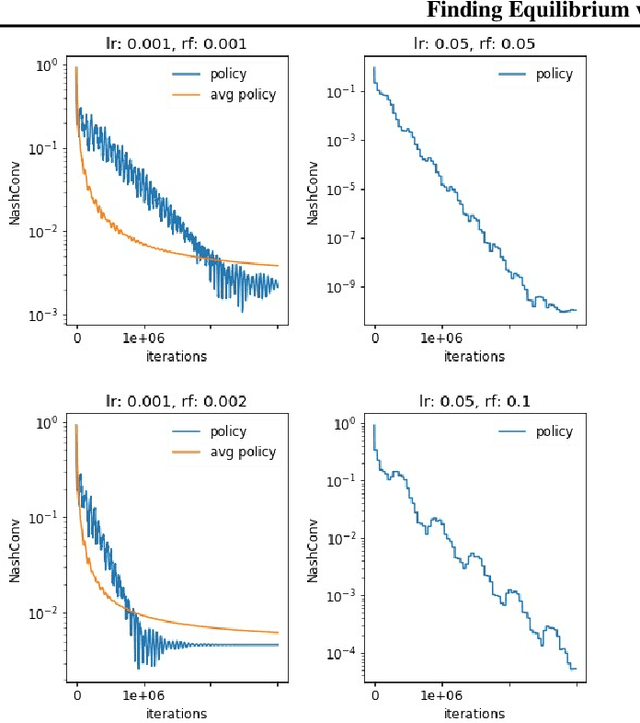
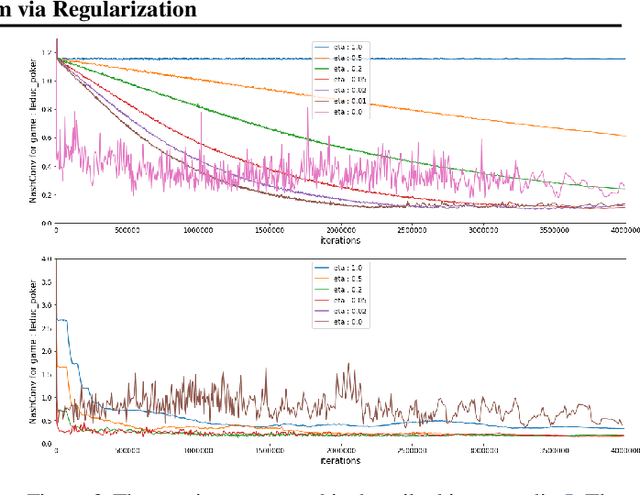
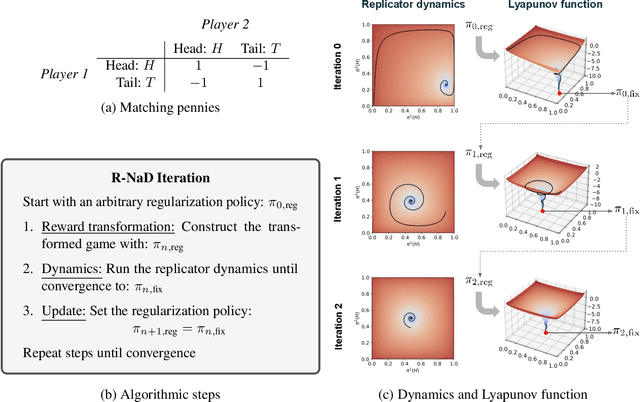
In this paper we investigate the Follow the Regularized Leader dynamics in sequential imperfect information games (IIG). We generalize existing results of Poincar\'e recurrence from normal-form games to zero-sum two-player imperfect information games and other sequential game settings. We then investigate how adapting the reward (by adding a regularization term) of the game can give strong convergence guarantees in monotone games. We continue by showing how this reward adaptation technique can be leveraged to build algorithms that converge exactly to the Nash equilibrium. Finally, we show how these insights can be directly used to build state-of-the-art model-free algorithms for zero-sum two-player Imperfect Information Games (IIG).
OpenSpiel: A Framework for Reinforcement Learning in Games
Oct 10, 2019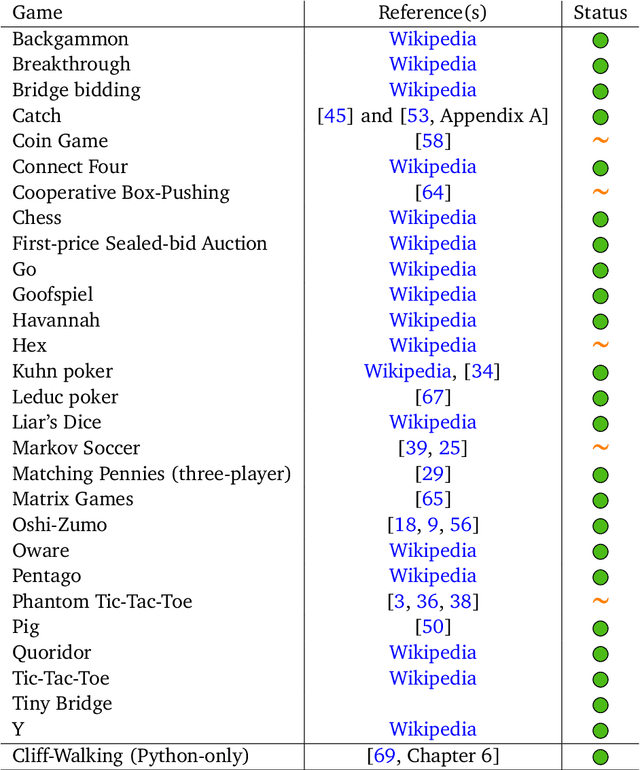
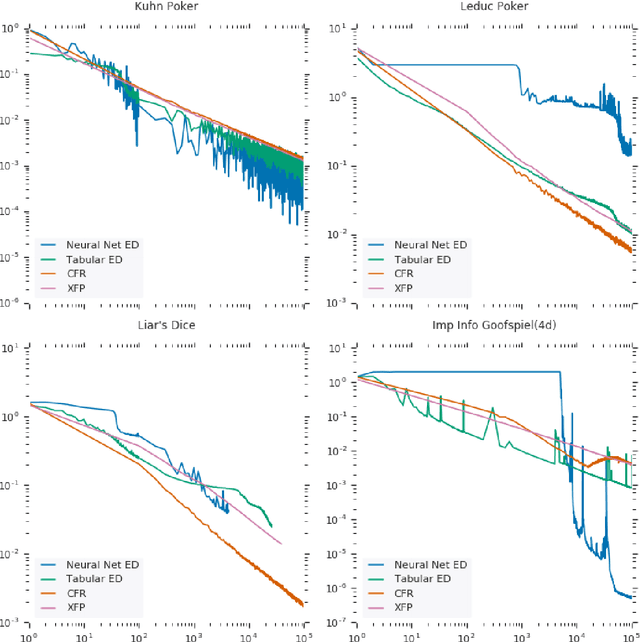
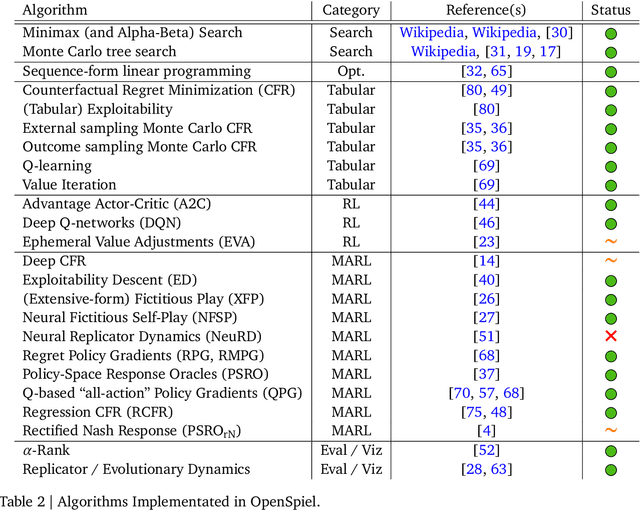
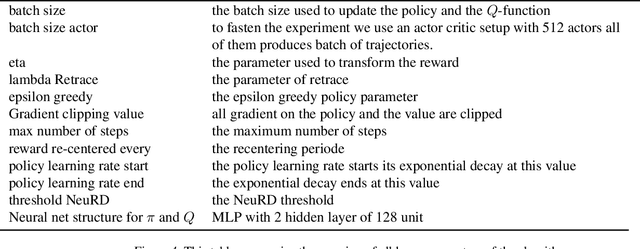
OpenSpiel is a collection of environments and algorithms for research in general reinforcement learning and search/planning in games. OpenSpiel supports n-player (single- and multi- agent) zero-sum, cooperative and general-sum, one-shot and sequential, strictly turn-taking and simultaneous-move, perfect and imperfect information games, as well as traditional multiagent environments such as (partially- and fully- observable) grid worlds and social dilemmas. OpenSpiel also includes tools to analyze learning dynamics and other common evaluation metrics. This document serves both as an overview of the code base and an introduction to the terminology, core concepts, and algorithms across the fields of reinforcement learning, computational game theory, and search.