 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCode World Models for General Game Playing
Oct 06, 2025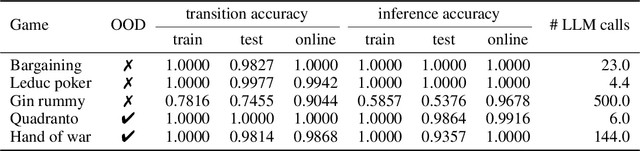

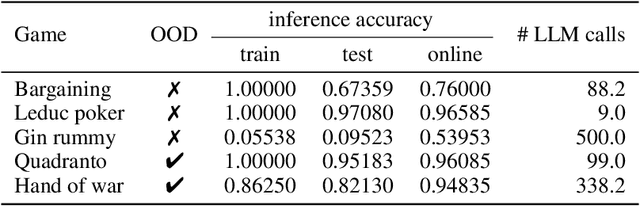
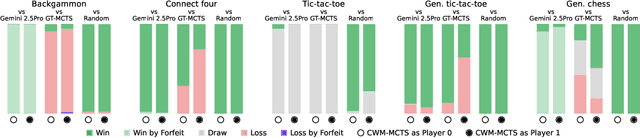
Large Language Models (LLMs) reasoning abilities are increasingly being applied to classical board and card games, but the dominant approach -- involving prompting for direct move generation -- has significant drawbacks. It relies on the model's implicit fragile pattern-matching capabilities, leading to frequent illegal moves and strategically shallow play. Here we introduce an alternative approach: We use the LLM to translate natural language rules and game trajectories into a formal, executable world model represented as Python code. This generated model -- comprising functions for state transition, legal move enumeration, and termination checks -- serves as a verifiable simulation engine for high-performance planning algorithms like Monte Carlo tree search (MCTS). In addition, we prompt the LLM to generate heuristic value functions (to make MCTS more efficient), and inference functions (to estimate hidden states in imperfect information games). Our method offers three distinct advantages compared to directly using the LLM as a policy: (1) Verifiability: The generated CWM serves as a formal specification of the game's rules, allowing planners to algorithmically enumerate valid actions and avoid illegal moves, contingent on the correctness of the synthesized model; (2) Strategic Depth: We combine LLM semantic understanding with the deep search power of classical planners; and (3) Generalization: We direct the LLM to focus on the meta-task of data-to-code translation, enabling it to adapt to new games more easily. We evaluate our agent on 10 different games, of which 4 are novel and created for this paper. 5 of the games are fully observed (perfect information), and 5 are partially observed (imperfect information). We find that our method outperforms or matches Gemini 2.5 Pro in 9 out of the 10 considered games.
TacticAI: an AI assistant for football tactics
Oct 17, 2023Identifying key patterns of tactics implemented by rival teams, and developing effective responses, lies at the heart of modern football. However, doing so algorithmically remains an open research challenge. To address this unmet need, we propose TacticAI, an AI football tactics assistant developed and evaluated in close collaboration with domain experts from Liverpool FC. We focus on analysing corner kicks, as they offer coaches the most direct opportunities for interventions and improvements. TacticAI incorporates both a predictive and a generative component, allowing the coaches to effectively sample and explore alternative player setups for each corner kick routine and to select those with the highest predicted likelihood of success. We validate TacticAI on a number of relevant benchmark tasks: predicting receivers and shot attempts and recommending player position adjustments. The utility of TacticAI is validated by a qualitative study conducted with football domain experts at Liverpool FC. We show that TacticAI's model suggestions are not only indistinguishable from real tactics, but also favoured over existing tactics 90% of the time, and that TacticAI offers an effective corner kick retrieval system. TacticAI achieves these results despite the limited availability of gold-standard data, achieving data efficiency through geometric deep learning.
Population-based Evaluation in Repeated Rock-Paper-Scissors as a Benchmark for Multiagent Reinforcement Learning
Mar 02, 2023



Progress in fields of machine learning and adversarial planning has benefited significantly from benchmark domains, from checkers and the classic UCI data sets to Go and Diplomacy. In sequential decision-making, agent evaluation has largely been restricted to few interactions against experts, with the aim to reach some desired level of performance (e.g. beating a human professional player). We propose a benchmark for multiagent learning based on repeated play of the simple game Rock, Paper, Scissors along with a population of forty-three tournament entries, some of which are intentionally sub-optimal. We describe metrics to measure the quality of agents based both on average returns and exploitability. We then show that several RL, online learning, and language model approaches can learn good counter-strategies and generalize well, but ultimately lose to the top-performing bots, creating an opportunity for research in multiagent learning.
Combining Tree-Search, Generative Models, and Nash Bargaining Concepts in Game-Theoretic Reinforcement Learning
Feb 01, 2023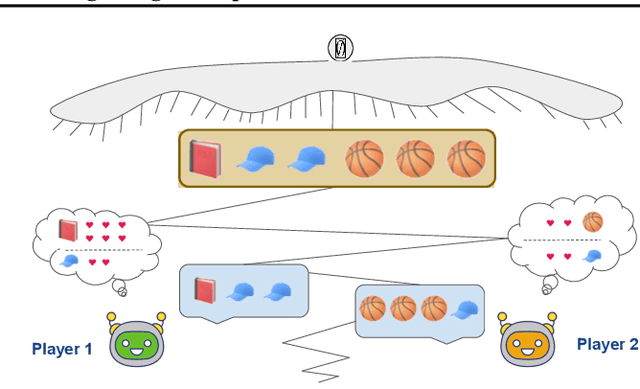
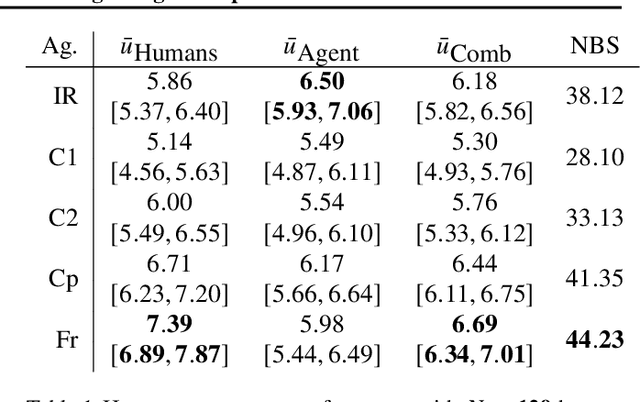
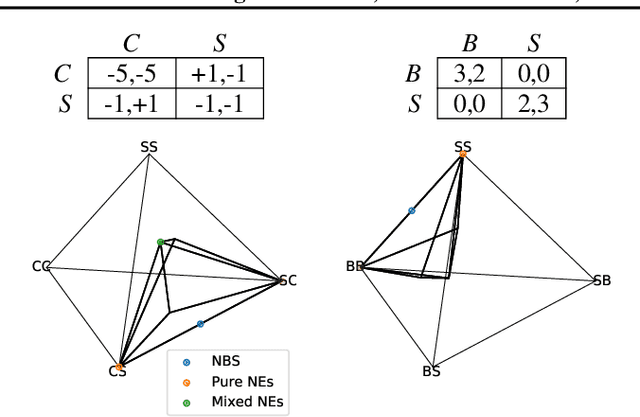
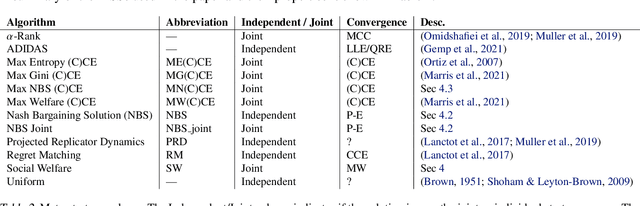
Multiagent reinforcement learning (MARL) has benefited significantly from population-based and game-theoretic training regimes. One approach, Policy-Space Response Oracles (PSRO), employs standard reinforcement learning to compute response policies via approximate best responses and combines them via meta-strategy selection. We augment PSRO by adding a novel search procedure with generative sampling of world states, and introduce two new meta-strategy solvers based on the Nash bargaining solution. We evaluate PSRO's ability to compute approximate Nash equilibrium, and its performance in two negotiation games: Colored Trails, and Deal or No Deal. We conduct behavioral studies where human participants negotiate with our agents ($N = 346$). We find that search with generative modeling finds stronger policies during both training time and test time, enables online Bayesian co-player prediction, and can produce agents that achieve comparable social welfare negotiating with humans as humans trading among themselves.
Developing, Evaluating and Scaling Learning Agents in Multi-Agent Environments
Sep 22, 2022The Game Theory & Multi-Agent team at DeepMind studies several aspects of multi-agent learning ranging from computing approximations to fundamental concepts in game theory to simulating social dilemmas in rich spatial environments and training 3-d humanoids in difficult team coordination tasks. A signature aim of our group is to use the resources and expertise made available to us at DeepMind in deep reinforcement learning to explore multi-agent systems in complex environments and use these benchmarks to advance our understanding. Here, we summarise the recent work of our team and present a taxonomy that we feel highlights many important open challenges in multi-agent research.
Mastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
Jun 30, 2022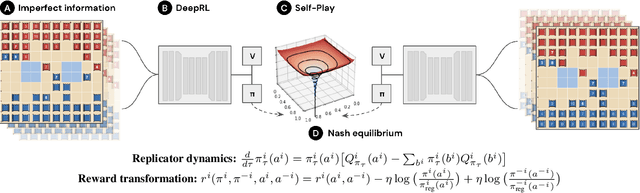
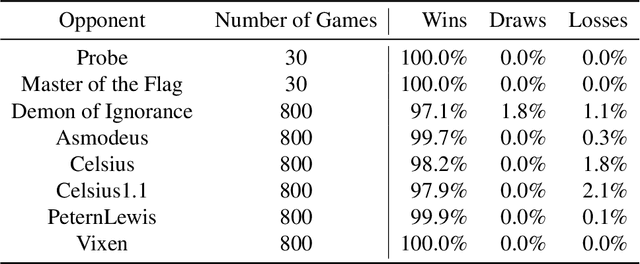
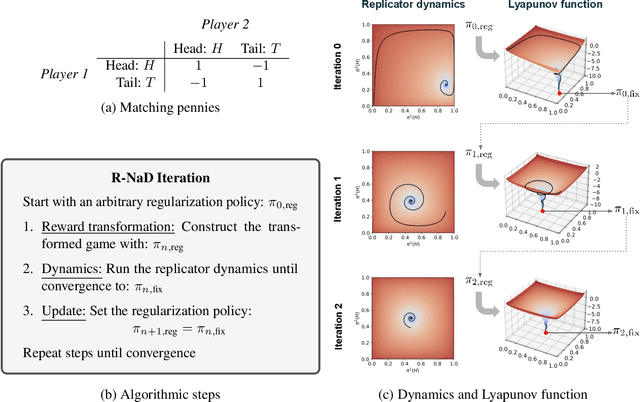
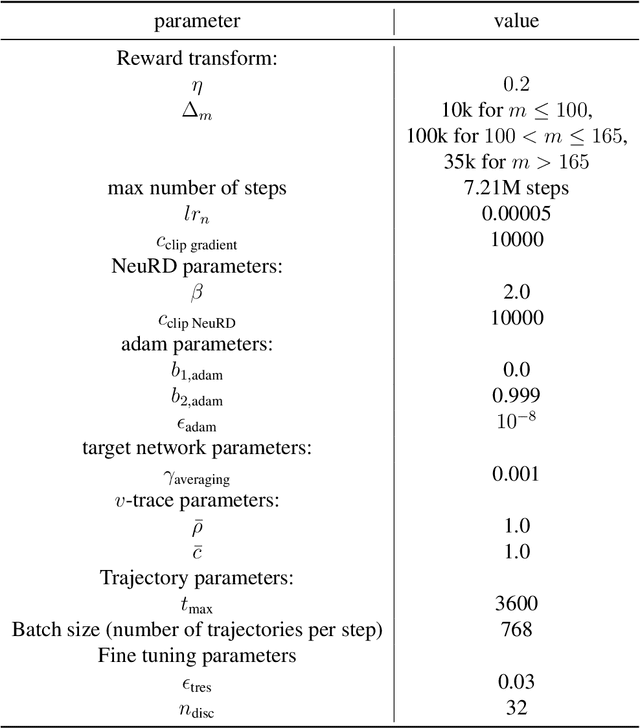
We introduce DeepNash, an autonomous agent capable of learning to play the imperfect information game Stratego from scratch, up to a human expert level. Stratego is one of the few iconic board games that Artificial Intelligence (AI) has not yet mastered. This popular game has an enormous game tree on the order of $10^{535}$ nodes, i.e., $10^{175}$ times larger than that of Go. It has the additional complexity of requiring decision-making under imperfect information, similar to Texas hold'em poker, which has a significantly smaller game tree (on the order of $10^{164}$ nodes). Decisions in Stratego are made over a large number of discrete actions with no obvious link between action and outcome. Episodes are long, with often hundreds of moves before a player wins, and situations in Stratego can not easily be broken down into manageably-sized sub-problems as in poker. For these reasons, Stratego has been a grand challenge for the field of AI for decades, and existing AI methods barely reach an amateur level of play. DeepNash uses a game-theoretic, model-free deep reinforcement learning method, without search, that learns to master Stratego via self-play. The Regularised Nash Dynamics (R-NaD) algorithm, a key component of DeepNash, converges to an approximate Nash equilibrium, instead of 'cycling' around it, by directly modifying the underlying multi-agent learning dynamics. DeepNash beats existing state-of-the-art AI methods in Stratego and achieved a yearly (2022) and all-time top-3 rank on the Gravon games platform, competing with human expert players.
NeuPL: Neural Population Learning
Feb 15, 2022



Learning in strategy games (e.g. StarCraft, poker) requires the discovery of diverse policies. This is often achieved by iteratively training new policies against existing ones, growing a policy population that is robust to exploit. This iterative approach suffers from two issues in real-world games: a) under finite budget, approximate best-response operators at each iteration needs truncating, resulting in under-trained good-responses populating the population; b) repeated learning of basic skills at each iteration is wasteful and becomes intractable in the presence of increasingly strong opponents. In this work, we propose Neural Population Learning (NeuPL) as a solution to both issues. NeuPL offers convergence guarantees to a population of best-responses under mild assumptions. By representing a population of policies within a single conditional model, NeuPL enables transfer learning across policies. Empirically, we show the generality, improved performance and efficiency of NeuPL across several test domains. Most interestingly, we show that novel strategies become more accessible, not less, as the neural population expands.
Which priors matter? Benchmarking models for learning latent dynamics
Nov 09, 2021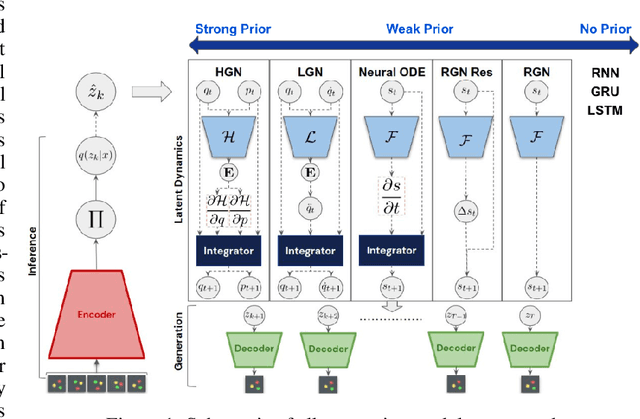
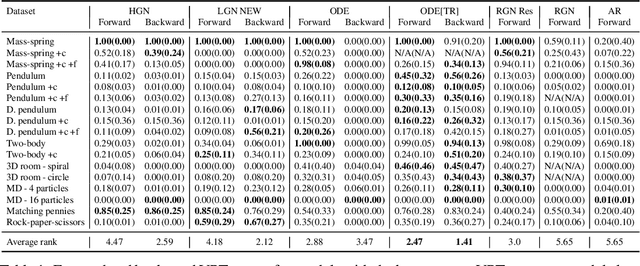

Learning dynamics is at the heart of many important applications of machine learning (ML), such as robotics and autonomous driving. In these settings, ML algorithms typically need to reason about a physical system using high dimensional observations, such as images, without access to the underlying state. Recently, several methods have proposed to integrate priors from classical mechanics into ML models to address the challenge of physical reasoning from images. In this work, we take a sober look at the current capabilities of these models. To this end, we introduce a suite consisting of 17 datasets with visual observations based on physical systems exhibiting a wide range of dynamics. We conduct a thorough and detailed comparison of the major classes of physically inspired methods alongside several strong baselines. While models that incorporate physical priors can often learn latent spaces with desirable properties, our results demonstrate that these methods fail to significantly improve upon standard techniques. Nonetheless, we find that the use of continuous and time-reversible dynamics benefits models of all classes.
Evolutionary Dynamics and $Φ$-Regret Minimization in Games
Jun 28, 2021



Regret has been established as a foundational concept in online learning, and likewise has important applications in the analysis of learning dynamics in games. Regret quantifies the difference between a learner's performance against a baseline in hindsight. It is well-known that regret-minimizing algorithms converge to certain classes of equilibria in games; however, traditional forms of regret used in game theory predominantly consider baselines that permit deviations to deterministic actions or strategies. In this paper, we revisit our understanding of regret from the perspective of deviations over partitions of the full \emph{mixed} strategy space (i.e., probability distributions over pure strategies), under the lens of the previously-established $\Phi$-regret framework, which provides a continuum of stronger regret measures. Importantly, $\Phi$-regret enables learning agents to consider deviations from and to mixed strategies, generalizing several existing notions of regret such as external, internal, and swap regret, and thus broadening the insights gained from regret-based analysis of learning algorithms. We prove here that the well-studied evolutionary learning algorithm of replicator dynamics (RD) seamlessly minimizes the strongest possible form of $\Phi$-regret in generic $2 \times 2$ games, without any modification of the underlying algorithm itself. We subsequently conduct experiments validating our theoretical results in a suite of 144 $2 \times 2$ games wherein RD exhibits a diverse set of behaviors. We conclude by providing empirical evidence of $\Phi$-regret minimization by RD in some larger games, hinting at further opportunity for $\Phi$-regret based study of such algorithms from both a theoretical and empirical perspective.
Time-series Imputation of Temporally-occluded Multiagent Trajectories
Jun 08, 2021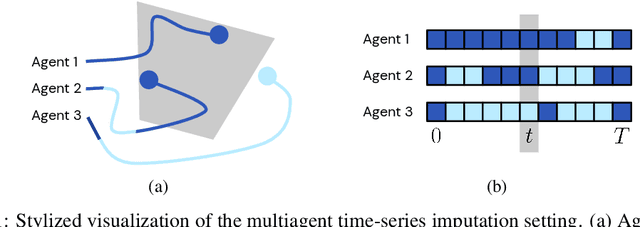
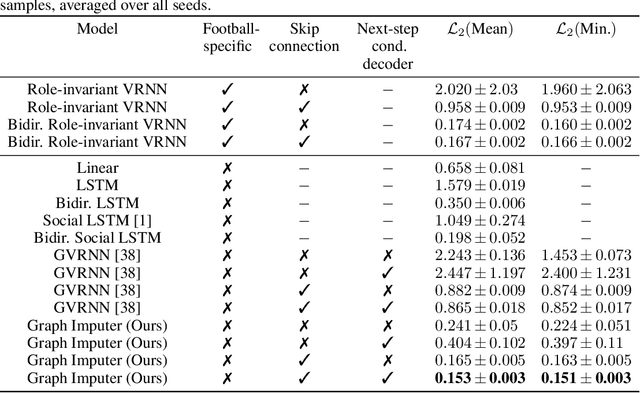


In multiagent environments, several decision-making individuals interact while adhering to the dynamics constraints imposed by the environment. These interactions, combined with the potential stochasticity of the agents' decision-making processes, make such systems complex and interesting to study from a dynamical perspective. Significant research has been conducted on learning models for forward-direction estimation of agent behaviors, for example, pedestrian predictions used for collision-avoidance in self-driving cars. However, in many settings, only sporadic observations of agents may be available in a given trajectory sequence. For instance, in football, subsets of players may come in and out of view of broadcast video footage, while unobserved players continue to interact off-screen. In this paper, we study the problem of multiagent time-series imputation, where available past and future observations of subsets of agents are used to estimate missing observations for other agents. Our approach, called the Graph Imputer, uses forward- and backward-information in combination with graph networks and variational autoencoders to enable learning of a distribution of imputed trajectories. We evaluate our approach on a dataset of football matches, using a projective camera module to train and evaluate our model for the off-screen player state estimation setting. We illustrate that our method outperforms several state-of-the-art approaches, including those hand-crafted for football.