 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Value Inconsistency as a Signal for Epistemic Uncertainty
Dec 08, 2021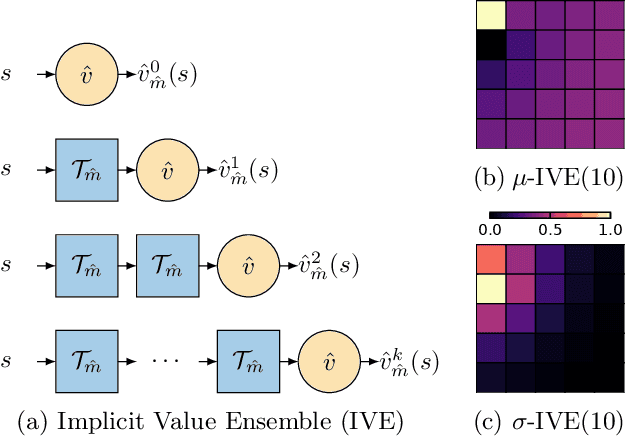
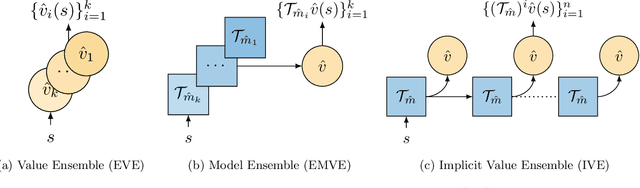
Using a model of the environment and a value function, an agent can construct many estimates of a state's value, by unrolling the model for different lengths and bootstrapping with its value function. Our key insight is that one can treat this set of value estimates as a type of ensemble, which we call an \emph{implicit value ensemble} (IVE). Consequently, the discrepancy between these estimates can be used as a proxy for the agent's epistemic uncertainty; we term this signal \emph{model-value inconsistency} or \emph{self-inconsistency} for short. Unlike prior work which estimates uncertainty by training an ensemble of many models and/or value functions, this approach requires only the single model and value function which are already being learned in most model-based reinforcement learning algorithms. We provide empirical evidence in both tabular and function approximation settings from pixels that self-inconsistency is useful (i) as a signal for exploration, (ii) for acting safely under distribution shifts, and (iii) for robustifying value-based planning with a model.
Introducing Symmetries to Black Box Meta Reinforcement Learning
Sep 22, 2021



Meta reinforcement learning (RL) attempts to discover new RL algorithms automatically from environment interaction. In so-called black-box approaches, the policy and the learning algorithm are jointly represented by a single neural network. These methods are very flexible, but they tend to underperform in terms of generalisation to new, unseen environments. In this paper, we explore the role of symmetries in meta-generalisation. We show that a recent successful meta RL approach that meta-learns an objective for backpropagation-based learning exhibits certain symmetries (specifically the reuse of the learning rule, and invariance to input and output permutations) that are not present in typical black-box meta RL systems. We hypothesise that these symmetries can play an important role in meta-generalisation. Building off recent work in black-box supervised meta learning, we develop a black-box meta RL system that exhibits these same symmetries. We show through careful experimentation that incorporating these symmetries can lead to algorithms with a greater ability to generalise to unseen action & observation spaces, tasks, and environments.