 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommand A: An Enterprise-Ready Large Language Model
Apr 01, 2025



In this report we describe the development of Command A, a powerful large language model purpose-built to excel at real-world enterprise use cases. Command A is an agent-optimised and multilingual-capable model, with support for 23 languages of global business, and a novel hybrid architecture balancing efficiency with top of the range performance. It offers best-in-class Retrieval Augmented Generation (RAG) capabilities with grounding and tool use to automate sophisticated business processes. These abilities are achieved through a decentralised training approach, including self-refinement algorithms and model merging techniques. We also include results for Command R7B which shares capability and architectural similarities to Command A. Weights for both models have been released for research purposes. This technical report details our original training pipeline and presents an extensive evaluation of our models across a suite of enterprise-relevant tasks and public benchmarks, demonstrating excellent performance and efficiency.
Short-Long Policy Evaluation with Novel Actions
Jul 04, 2024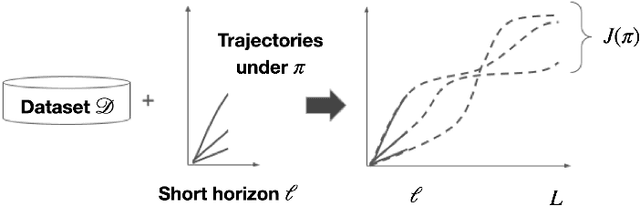
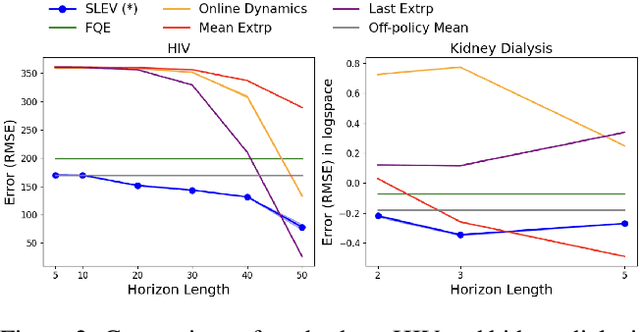
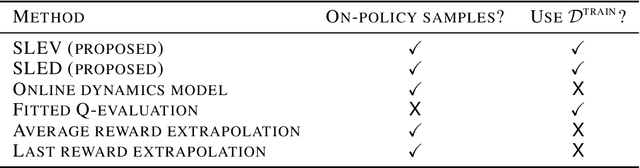
From incorporating LLMs in education, to identifying new drugs and improving ways to charge batteries, innovators constantly try new strategies in search of better long-term outcomes for students, patients and consumers. One major bottleneck in this innovation cycle is the amount of time it takes to observe the downstream effects of a decision policy that incorporates new interventions. The key question is whether we can quickly evaluate long-term outcomes of a new decision policy without making long-term observations. Organizations often have access to prior data about past decision policies and their outcomes, evaluated over the full horizon of interest. Motivated by this, we introduce a new setting for short-long policy evaluation for sequential decision making tasks. Our proposed methods significantly outperform prior results on simulators of HIV treatment, kidney dialysis and battery charging. We also demonstrate that our methods can be useful for applications in AI safety by quickly identifying when a new decision policy is likely to have substantially lower performance than past policies.
Contrastive Policy Gradient: Aligning LLMs on sequence-level scores in a supervised-friendly fashion
Jun 27, 2024Reinforcement Learning (RL) has been used to finetune Large Language Models (LLMs) using a reward model trained from preference data, to better align with human judgment. The recently introduced direct alignment methods, which are often simpler, more stable, and computationally lighter, can more directly achieve this. However, these approaches cannot optimize arbitrary rewards, and the preference-based ones are not the only rewards of interest for LLMs (eg., unit tests for code generation or textual entailment for summarization, among others). RL-finetuning is usually done with a variation of policy gradient, which calls for on-policy or near-on-policy samples, requiring costly generations. We introduce Contrastive Policy Gradient, or CoPG, a simple and mathematically principled new RL algorithm that can estimate the optimal policy even from off-policy data. It can be seen as an off-policy policy gradient approach that does not rely on important sampling techniques and highlights the importance of using (the right) state baseline. We show this approach to generalize the direct alignment method IPO (identity preference optimization) and classic policy gradient. We experiment with the proposed CoPG on a toy bandit problem to illustrate its properties, as well as for finetuning LLMs on a summarization task, using a learned reward function considered as ground truth for the purpose of the experiments.
Averaging log-likelihoods in direct alignment
Jun 27, 2024



To better align Large Language Models (LLMs) with human judgment, Reinforcement Learning from Human Feedback (RLHF) learns a reward model and then optimizes it using regularized RL. Recently, direct alignment methods were introduced to learn such a fine-tuned model directly from a preference dataset without computing a proxy reward function. These methods are built upon contrastive losses involving the log-likelihood of (dis)preferred completions according to the trained model. However, completions have various lengths, and the log-likelihood is not length-invariant. On the other side, the cross-entropy loss used in supervised training is length-invariant, as batches are typically averaged token-wise. To reconcile these approaches, we introduce a principled approach for making direct alignment length-invariant. Formally, we introduce a new averaging operator, to be composed with the optimality operator giving the best policy for the underlying RL problem. It translates into averaging the log-likelihood within the loss. We empirically study the effect of such averaging, observing a trade-off between the length of generations and their scores.
OPERA: Automatic Offline Policy Evaluation with Re-weighted Aggregates of Multiple Estimators
May 27, 2024



Offline policy evaluation (OPE) allows us to evaluate and estimate a new sequential decision-making policy's performance by leveraging historical interaction data collected from other policies. Evaluating a new policy online without a confident estimate of its performance can lead to costly, unsafe, or hazardous outcomes, especially in education and healthcare. Several OPE estimators have been proposed in the last decade, many of which have hyperparameters and require training. Unfortunately, choosing the best OPE algorithm for each task and domain is still unclear. In this paper, we propose a new algorithm that adaptively blends a set of OPE estimators given a dataset without relying on an explicit selection using a statistical procedure. We prove that our estimator is consistent and satisfies several desirable properties for policy evaluation. Additionally, we demonstrate that when compared to alternative approaches, our estimator can be used to select higher-performing policies in healthcare and robotics. Our work contributes to improving ease of use for a general-purpose, estimator-agnostic, off-policy evaluation framework for offline RL.
A/B testing under Interference with Partial Network Information
Apr 16, 2024



A/B tests are often required to be conducted on subjects that might have social connections. For e.g., experiments on social media, or medical and social interventions to control the spread of an epidemic. In such settings, the SUTVA assumption for randomized-controlled trials is violated due to network interference, or spill-over effects, as treatments to group A can potentially also affect the control group B. When the underlying social network is known exactly, prior works have demonstrated how to conduct A/B tests adequately to estimate the global average treatment effect (GATE). However, in practice, it is often impossible to obtain knowledge about the exact underlying network. In this paper, we present UNITE: a novel estimator that relax this assumption and can identify GATE while only relying on knowledge of the superset of neighbors for any subject in the graph. Through theoretical analysis and extensive experiments, we show that the proposed approach performs better in comparison to standard estimators.
Adaptive Instrument Design for Indirect Experiments
Dec 05, 2023



Indirect experiments provide a valuable framework for estimating treatment effects in situations where conducting randomized control trials (RCTs) is impractical or unethical. Unlike RCTs, indirect experiments estimate treatment effects by leveraging (conditional) instrumental variables, enabling estimation through encouragement and recommendation rather than strict treatment assignment. However, the sample efficiency of such estimators depends not only on the inherent variability in outcomes but also on the varying compliance levels of users with the instrumental variables and the choice of estimator being used, especially when dealing with numerous instrumental variables. While adaptive experiment design has a rich literature for direct experiments, in this paper we take the initial steps towards enhancing sample efficiency for indirect experiments by adaptively designing a data collection policy over instrumental variables. Our main contribution is a practical computational procedure that utilizes influence functions to search for an optimal data collection policy, minimizing the mean-squared error of the desired (non-linear) estimator. Through experiments conducted in various domains inspired by real-world applications, we showcase how our method can significantly improve the sample efficiency of indirect experiments.
Behavior Alignment via Reward Function Optimization
Oct 31, 2023



Designing reward functions for efficiently guiding reinforcement learning (RL) agents toward specific behaviors is a complex task. This is challenging since it requires the identification of reward structures that are not sparse and that avoid inadvertently inducing undesirable behaviors. Naively modifying the reward structure to offer denser and more frequent feedback can lead to unintended outcomes and promote behaviors that are not aligned with the designer's intended goal. Although potential-based reward shaping is often suggested as a remedy, we systematically investigate settings where deploying it often significantly impairs performance. To address these issues, we introduce a new framework that uses a bi-level objective to learn \emph{behavior alignment reward functions}. These functions integrate auxiliary rewards reflecting a designer's heuristics and domain knowledge with the environment's primary rewards. Our approach automatically determines the most effective way to blend these types of feedback, thereby enhancing robustness against heuristic reward misspecification. Remarkably, it can also adapt an agent's policy optimization process to mitigate suboptimalities resulting from limitations and biases inherent in the underlying RL algorithms. We evaluate our method's efficacy on a diverse set of tasks, from small-scale experiments to high-dimensional control challenges. We investigate heuristic auxiliary rewards of varying quality -- some of which are beneficial and others detrimental to the learning process. Our results show that our framework offers a robust and principled way to integrate designer-specified heuristics. It not only addresses key shortcomings of existing approaches but also consistently leads to high-performing solutions, even when given misaligned or poorly-specified auxiliary reward functions.
Supervised Pretraining Can Learn In-Context Reinforcement Learning
Jun 26, 2023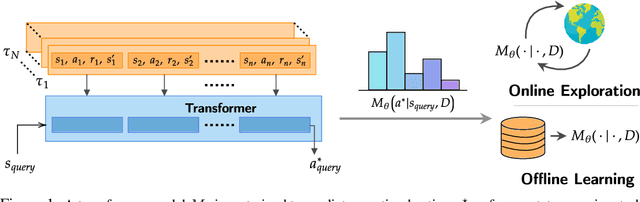
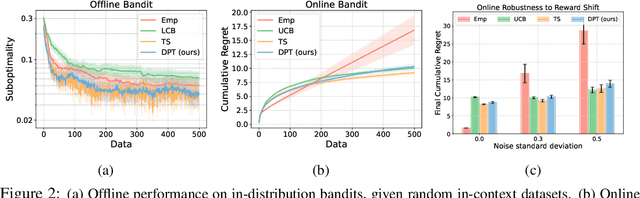
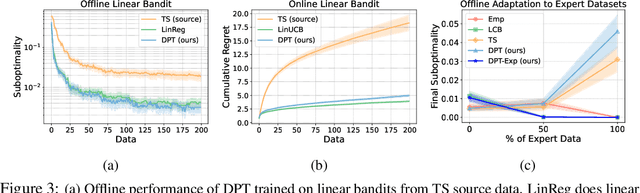
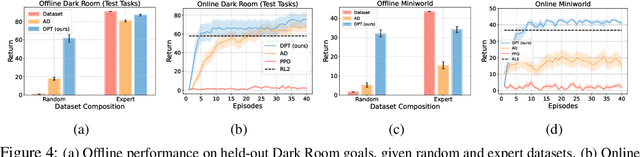
Large transformer models trained on diverse datasets have shown a remarkable ability to learn in-context, achieving high few-shot performance on tasks they were not explicitly trained to solve. In this paper, we study the in-context learning capabilities of transformers in decision-making problems, i.e., reinforcement learning (RL) for bandits and Markov decision processes. To do so, we introduce and study Decision-Pretrained Transformer (DPT), a supervised pretraining method where the transformer predicts an optimal action given a query state and an in-context dataset of interactions, across a diverse set of tasks. This procedure, while simple, produces a model with several surprising capabilities. We find that the pretrained transformer can be used to solve a range of RL problems in-context, exhibiting both exploration online and conservatism offline, despite not being explicitly trained to do so. The model also generalizes beyond the pretraining distribution to new tasks and automatically adapts its decision-making strategies to unknown structure. Theoretically, we show DPT can be viewed as an efficient implementation of Bayesian posterior sampling, a provably sample-efficient RL algorithm. We further leverage this connection to provide guarantees on the regret of the in-context algorithm yielded by DPT, and prove that it can learn faster than algorithms used to generate the pretraining data. These results suggest a promising yet simple path towards instilling strong in-context decision-making abilities in transformers.
Coagent Networks: Generalized and Scaled
May 16, 2023

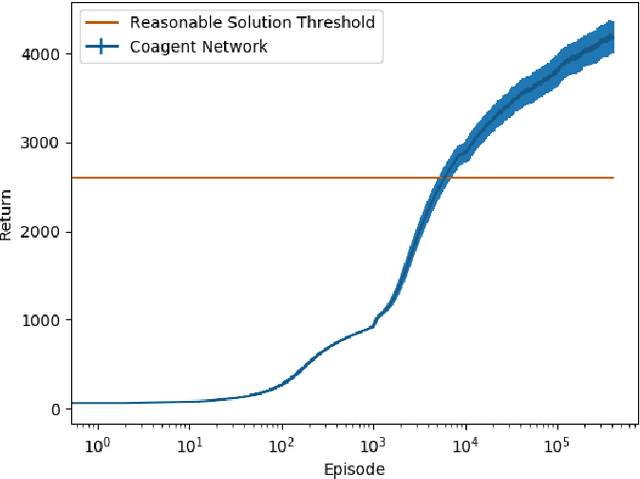
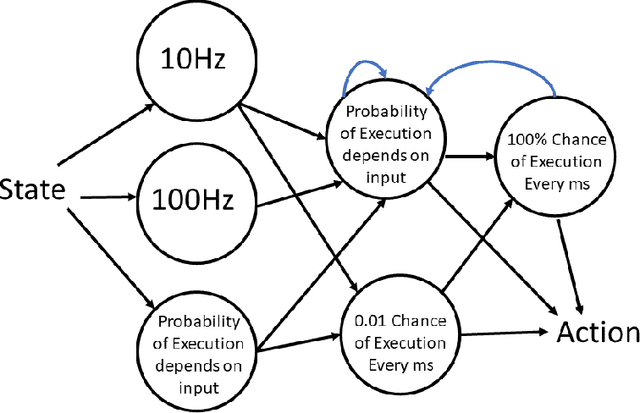
Coagent networks for reinforcement learning (RL) [Thomas and Barto, 2011] provide a powerful and flexible framework for deriving principled learning rules for arbitrary stochastic neural networks. The coagent framework offers an alternative to backpropagation-based deep learning (BDL) that overcomes some of backpropagation's main limitations. For example, coagent networks can compute different parts of the network \emph{asynchronously} (at different rates or at different times), can incorporate non-differentiable components that cannot be used with backpropagation, and can explore at levels higher than their action spaces (that is, they can be designed as hierarchical networks for exploration and/or temporal abstraction). However, the coagent framework is not just an alternative to BDL; the two approaches can be blended: BDL can be combined with coagent learning rules to create architectures with the advantages of both approaches. This work generalizes the coagent theory and learning rules provided by previous works; this generalization provides more flexibility for network architecture design within the coagent framework. This work also studies one of the chief disadvantages of coagent networks: high variance updates for networks that have many coagents and do not use backpropagation. We show that a coagent algorithm with a policy network that does not use backpropagation can scale to a challenging RL domain with a high-dimensional state and action space (the MuJoCo Ant environment), learning reasonable (although not state-of-the-art) policies. These contributions motivate and provide a more general theoretical foundation for future work that studies coagent networks.