 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbstract Reward Processes: Leveraging State Abstraction for Consistent Off-Policy Evaluation
Oct 03, 2024Evaluating policies using off-policy data is crucial for applying reinforcement learning to real-world problems such as healthcare and autonomous driving. Previous methods for off-policy evaluation (OPE) generally suffer from high variance or irreducible bias, leading to unacceptably high prediction errors. In this work, we introduce STAR, a framework for OPE that encompasses a broad range of estimators -- which include existing OPE methods as special cases -- that achieve lower mean squared prediction errors. STAR leverages state abstraction to distill complex, potentially continuous problems into compact, discrete models which we call abstract reward processes (ARPs). Predictions from ARPs estimated from off-policy data are provably consistent (asymptotically correct). Rather than proposing a specific estimator, we present a new framework for OPE and empirically demonstrate that estimators within STAR outperform existing methods. The best STAR estimator outperforms baselines in all twelve cases studied, and even the median STAR estimator surpasses the baselines in seven out of the twelve cases.
Position: Benchmarking is Limited in Reinforcement Learning Research
Jun 23, 2024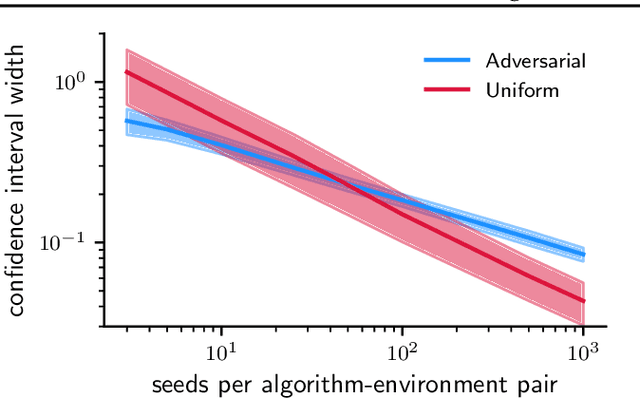

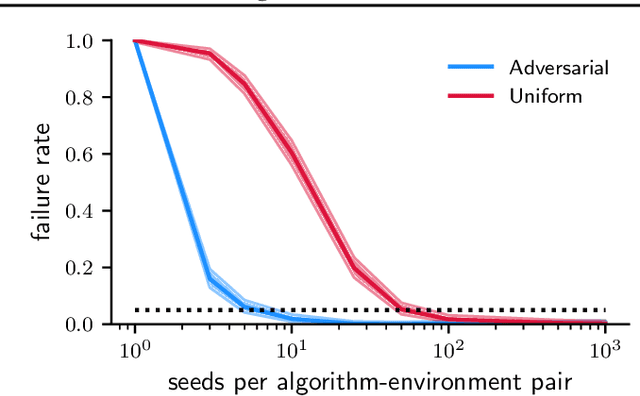
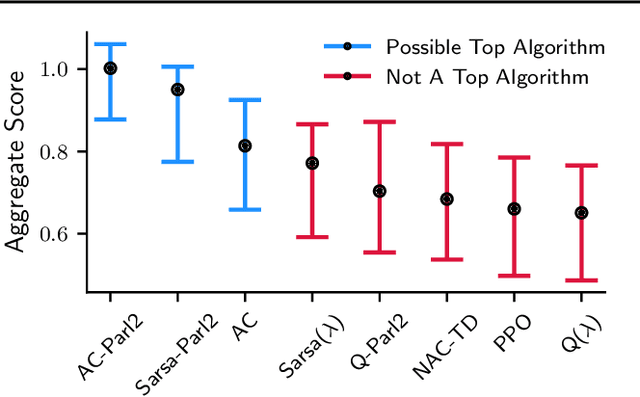
Novel reinforcement learning algorithms, or improvements on existing ones, are commonly justified by evaluating their performance on benchmark environments and are compared to an ever-changing set of standard algorithms. However, despite numerous calls for improvements, experimental practices continue to produce misleading or unsupported claims. One reason for the ongoing substandard practices is that conducting rigorous benchmarking experiments requires substantial computational time. This work investigates the sources of increased computation costs in rigorous experiment designs. We show that conducting rigorous performance benchmarks will likely have computational costs that are often prohibitive. As a result, we argue for using an additional experimentation paradigm to overcome the limitations of benchmarking.
RLHF Deciphered: A Critical Analysis of Reinforcement Learning from Human Feedback for LLMs
Apr 12, 2024



State-of-the-art large language models (LLMs) have become indispensable tools for various tasks. However, training LLMs to serve as effective assistants for humans requires careful consideration. A promising approach is reinforcement learning from human feedback (RLHF), which leverages human feedback to update the model in accordance with human preferences and mitigate issues like toxicity and hallucinations. Yet, an understanding of RLHF for LLMs is largely entangled with initial design choices that popularized the method and current research focuses on augmenting those choices rather than fundamentally improving the framework. In this paper, we analyze RLHF through the lens of reinforcement learning principles to develop an understanding of its fundamentals, dedicating substantial focus to the core component of RLHF -- the reward model. Our study investigates modeling choices, caveats of function approximation, and their implications on RLHF training algorithms, highlighting the underlying assumptions made about the expressivity of reward. Our analysis improves the understanding of the role of reward models and methods for their training, concurrently revealing limitations of the current methodology. We characterize these limitations, including incorrect generalization, model misspecification, and the sparsity of feedback, along with their impact on the performance of a language model. The discussion and analysis are substantiated by a categorical review of current literature, serving as a reference for researchers and practitioners to understand the challenges of RLHF and build upon existing efforts.
From Past to Future: Rethinking Eligibility Traces
Dec 20, 2023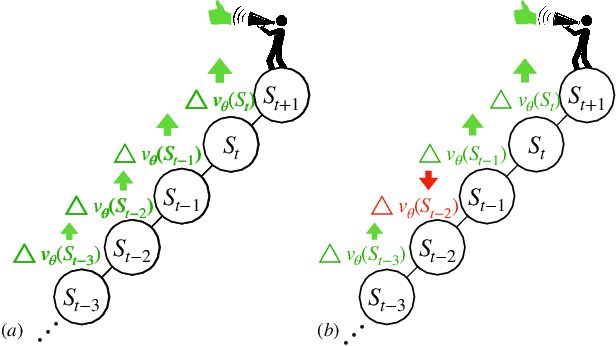
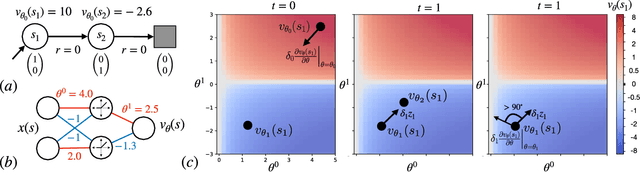
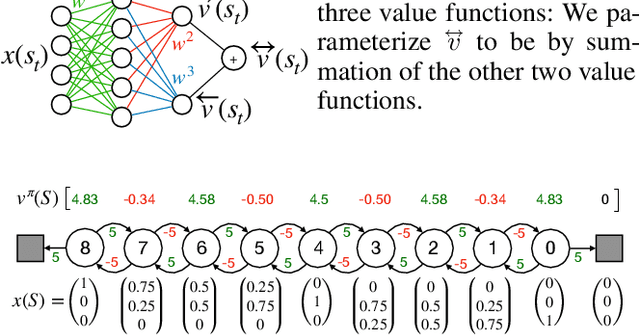
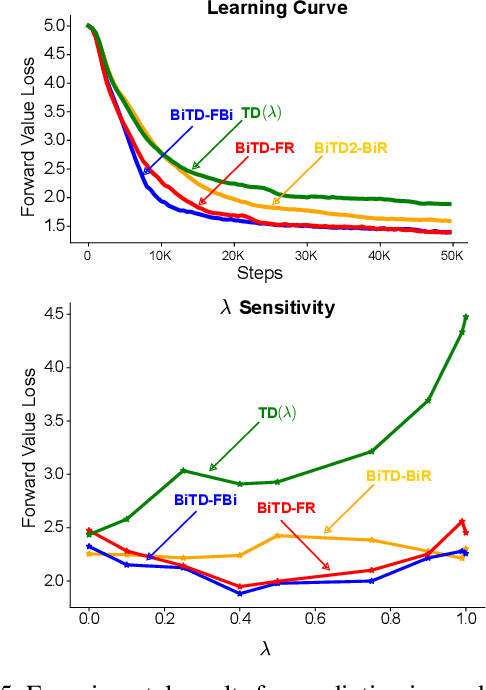
In this paper, we introduce a fresh perspective on the challenges of credit assignment and policy evaluation. First, we delve into the nuances of eligibility traces and explore instances where their updates may result in unexpected credit assignment to preceding states. From this investigation emerges the concept of a novel value function, which we refer to as the \emph{bidirectional value function}. Unlike traditional state value functions, bidirectional value functions account for both future expected returns (rewards anticipated from the current state onward) and past expected returns (cumulative rewards from the episode's start to the present). We derive principled update equations to learn this value function and, through experimentation, demonstrate its efficacy in enhancing the process of policy evaluation. In particular, our results indicate that the proposed learning approach can, in certain challenging contexts, perform policy evaluation more rapidly than TD($\lambda$) -- a method that learns forward value functions, $v^\pi$, \emph{directly}. Overall, our findings present a new perspective on eligibility traces and potential advantages associated with the novel value function it inspires, especially for policy evaluation.
Behavior Alignment via Reward Function Optimization
Oct 31, 2023



Designing reward functions for efficiently guiding reinforcement learning (RL) agents toward specific behaviors is a complex task. This is challenging since it requires the identification of reward structures that are not sparse and that avoid inadvertently inducing undesirable behaviors. Naively modifying the reward structure to offer denser and more frequent feedback can lead to unintended outcomes and promote behaviors that are not aligned with the designer's intended goal. Although potential-based reward shaping is often suggested as a remedy, we systematically investigate settings where deploying it often significantly impairs performance. To address these issues, we introduce a new framework that uses a bi-level objective to learn \emph{behavior alignment reward functions}. These functions integrate auxiliary rewards reflecting a designer's heuristics and domain knowledge with the environment's primary rewards. Our approach automatically determines the most effective way to blend these types of feedback, thereby enhancing robustness against heuristic reward misspecification. Remarkably, it can also adapt an agent's policy optimization process to mitigate suboptimalities resulting from limitations and biases inherent in the underlying RL algorithms. We evaluate our method's efficacy on a diverse set of tasks, from small-scale experiments to high-dimensional control challenges. We investigate heuristic auxiliary rewards of varying quality -- some of which are beneficial and others detrimental to the learning process. Our results show that our framework offers a robust and principled way to integrate designer-specified heuristics. It not only addresses key shortcomings of existing approaches but also consistently leads to high-performing solutions, even when given misaligned or poorly-specified auxiliary reward functions.
Coagent Networks: Generalized and Scaled
May 16, 2023

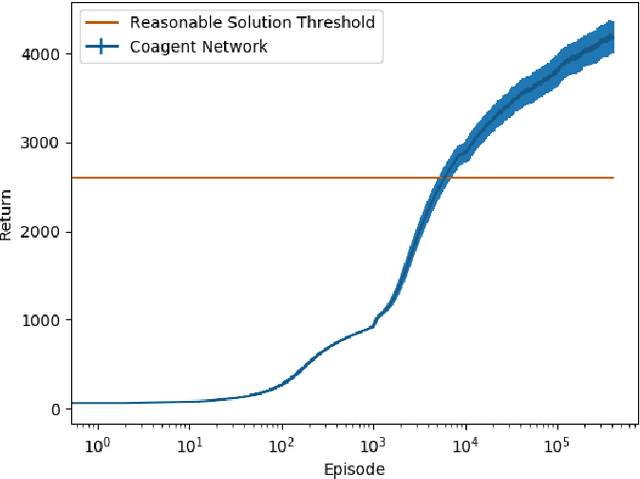
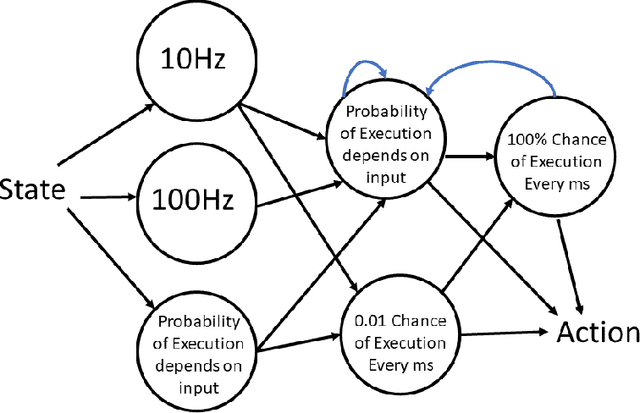
Coagent networks for reinforcement learning (RL) [Thomas and Barto, 2011] provide a powerful and flexible framework for deriving principled learning rules for arbitrary stochastic neural networks. The coagent framework offers an alternative to backpropagation-based deep learning (BDL) that overcomes some of backpropagation's main limitations. For example, coagent networks can compute different parts of the network \emph{asynchronously} (at different rates or at different times), can incorporate non-differentiable components that cannot be used with backpropagation, and can explore at levels higher than their action spaces (that is, they can be designed as hierarchical networks for exploration and/or temporal abstraction). However, the coagent framework is not just an alternative to BDL; the two approaches can be blended: BDL can be combined with coagent learning rules to create architectures with the advantages of both approaches. This work generalizes the coagent theory and learning rules provided by previous works; this generalization provides more flexibility for network architecture design within the coagent framework. This work also studies one of the chief disadvantages of coagent networks: high variance updates for networks that have many coagents and do not use backpropagation. We show that a coagent algorithm with a policy network that does not use backpropagation can scale to a challenging RL domain with a high-dimensional state and action space (the MuJoCo Ant environment), learning reasonable (although not state-of-the-art) policies. These contributions motivate and provide a more general theoretical foundation for future work that studies coagent networks.
Off-Policy Evaluation for Action-Dependent Non-Stationary Environments
Jan 24, 2023Methods for sequential decision-making are often built upon a foundational assumption that the underlying decision process is stationary. This limits the application of such methods because real-world problems are often subject to changes due to external factors (passive non-stationarity), changes induced by interactions with the system itself (active non-stationarity), or both (hybrid non-stationarity). In this work, we take the first steps towards the fundamental challenge of on-policy and off-policy evaluation amidst structured changes due to active, passive, or hybrid non-stationarity. Towards this goal, we make a higher-order stationarity assumption such that non-stationarity results in changes over time, but the way changes happen is fixed. We propose, OPEN, an algorithm that uses a double application of counterfactual reasoning and a novel importance-weighted instrument-variable regression to obtain both a lower bias and a lower variance estimate of the structure in the changes of a policy's past performances. Finally, we show promising results on how OPEN can be used to predict future performances for several domains inspired by real-world applications that exhibit non-stationarity.
Model-Based Reinforcement Learning with SINDy
Aug 30, 2022

We draw on the latest advancements in the physics community to propose a novel method for discovering the governing non-linear dynamics of physical systems in reinforcement learning (RL). We establish that this method is capable of discovering the underlying dynamics using significantly fewer trajectories (as little as one rollout with $\leq 30$ time steps) than state of the art model learning algorithms. Further, the technique learns a model that is accurate enough to induce near-optimal policies given significantly fewer trajectories than those required by model-free algorithms. It brings the benefits of model-based RL without requiring a model to be developed in advance, for systems that have physics-based dynamics. To establish the validity and applicability of this algorithm, we conduct experiments on four classic control tasks. We found that an optimal policy trained on the discovered dynamics of the underlying system can generalize well. Further, the learned policy performs well when deployed on the actual physical system, thus bridging the model to real system gap. We further compare our method to state-of-the-art model-based and model-free approaches, and show that our method requires fewer trajectories sampled on the true physical system compared other methods. Additionally, we explored approximate dynamics models and found that they also can perform well.
Enforcing Delayed-Impact Fairness Guarantees
Aug 24, 2022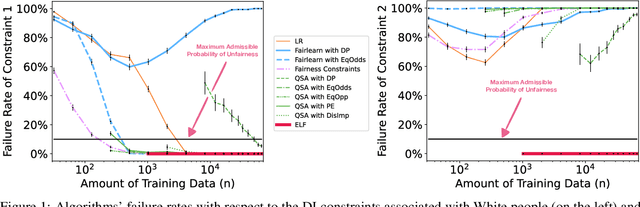
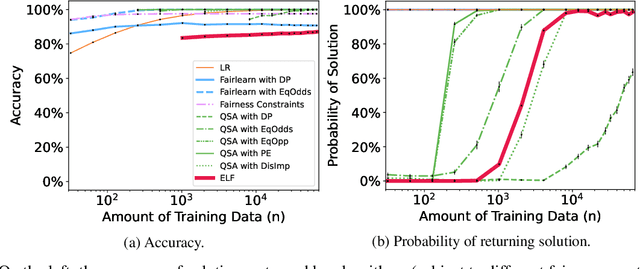
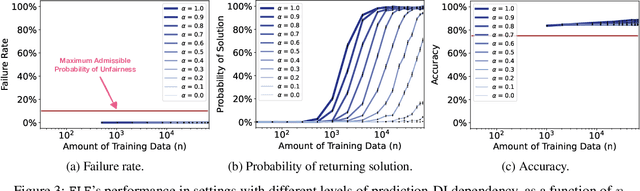
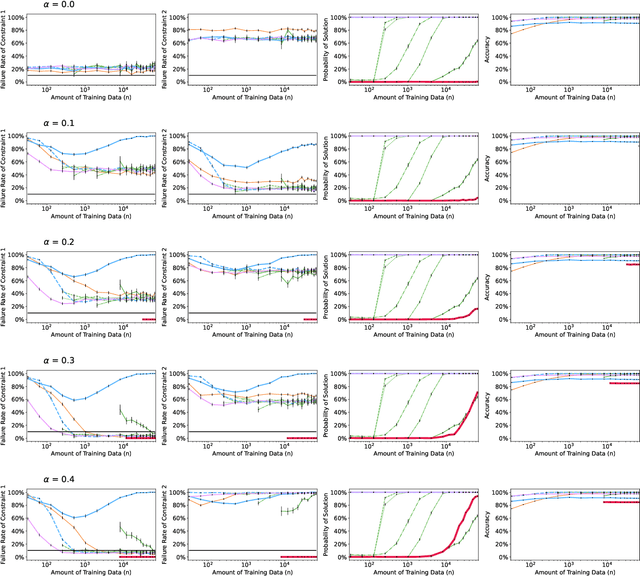
Recent research has shown that seemingly fair machine learning models, when used to inform decisions that have an impact on peoples' lives or well-being (e.g., applications involving education, employment, and lending), can inadvertently increase social inequality in the long term. This is because prior fairness-aware algorithms only consider static fairness constraints, such as equal opportunity or demographic parity. However, enforcing constraints of this type may result in models that have negative long-term impact on disadvantaged individuals and communities. We introduce ELF (Enforcing Long-term Fairness), the first classification algorithm that provides high-confidence fairness guarantees in terms of long-term, or delayed, impact. We prove that the probability that ELF returns an unfair solution is less than a user-specified tolerance and that (under mild assumptions), given sufficient training data, ELF is able to find and return a fair solution if one exists. We show experimentally that our algorithm can successfully mitigate long-term unfairness.
Universal Off-Policy Evaluation
Apr 26, 2021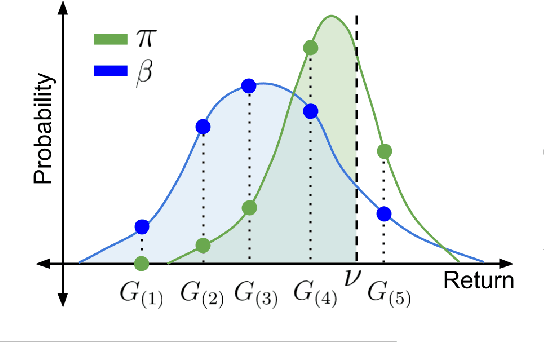

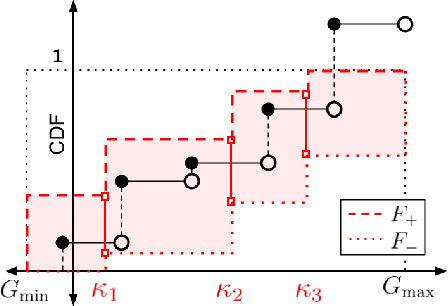

When faced with sequential decision-making problems, it is often useful to be able to predict what would happen if decisions were made using a new policy. Those predictions must often be based on data collected under some previously used decision-making rule. Many previous methods enable such off-policy (or counterfactual) estimation of the expected value of a performance measure called the return. In this paper, we take the first steps towards a universal off-policy estimator (UnO) -- one that provides off-policy estimates and high-confidence bounds for any parameter of the return distribution. We use UnO for estimating and simultaneously bounding the mean, variance, quantiles/median, inter-quantile range, CVaR, and the entire cumulative distribution of returns. Finally, we also discuss Uno's applicability in various settings, including fully observable, partially observable (i.e., with unobserved confounders), Markovian, non-Markovian, stationary, smoothly non-stationary, and discrete distribution shifts.