 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Bootstrap Latent-Predictive Representations for Multitask Reinforcement Learning
Apr 30, 2020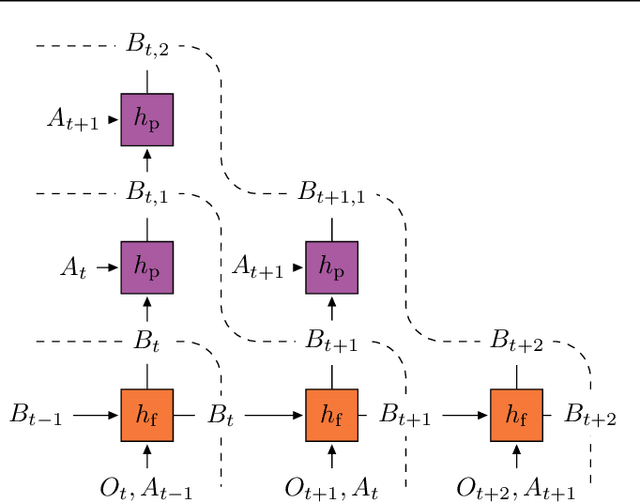
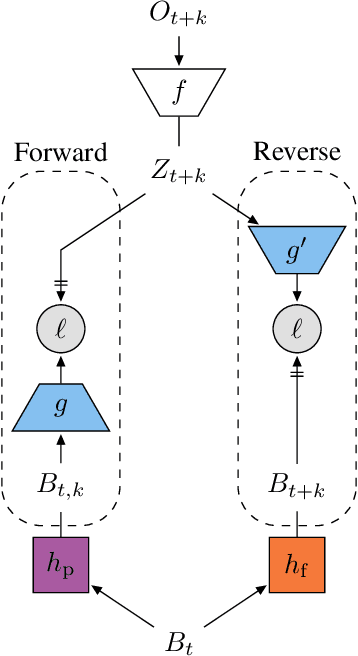
Learning a good representation is an essential component for deep reinforcement learning (RL). Representation learning is especially important in multitask and partially observable settings where building a representation of the unknown environment is crucial to solve the tasks. Here we introduce Prediction of Bootstrap Latents (PBL), a simple and flexible self-supervised representation learning algorithm for multitask deep RL. PBL builds on multistep predictive representations of future observations, and focuses on capturing structured information about environment dynamics. Specifically, PBL trains its representation by predicting latent embeddings of future observations. These latent embeddings are themselves trained to be predictive of the aforementioned representations. These predictions form a bootstrapping effect, allowing the agent to learn more about the key aspects of the environment dynamics. In addition, by defining prediction tasks completely in latent space, PBL provides the flexibility of using multimodal observations involving pixel images, language instructions, rewards and more. We show in our experiments that PBL delivers across-the-board improved performance over state of the art deep RL agents in the DMLab-30 and Atari-57 multitask setting.