 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraphCast: Learning skillful medium-range global weather forecasting
Dec 24, 2022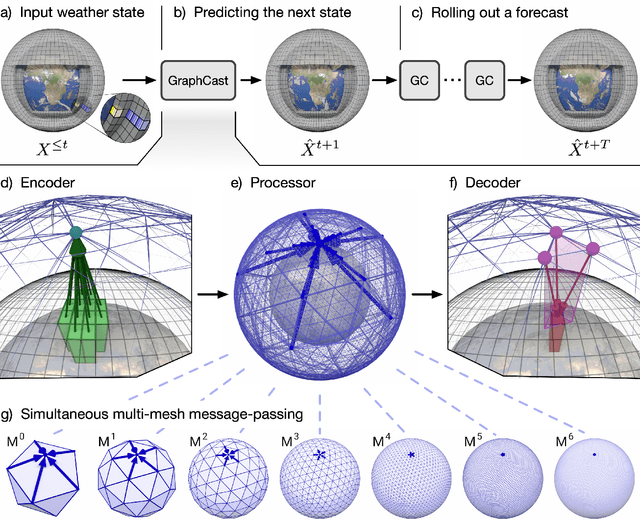
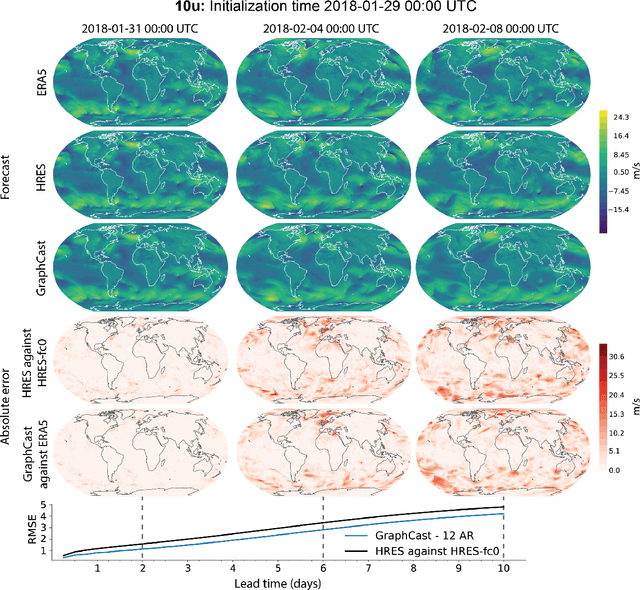
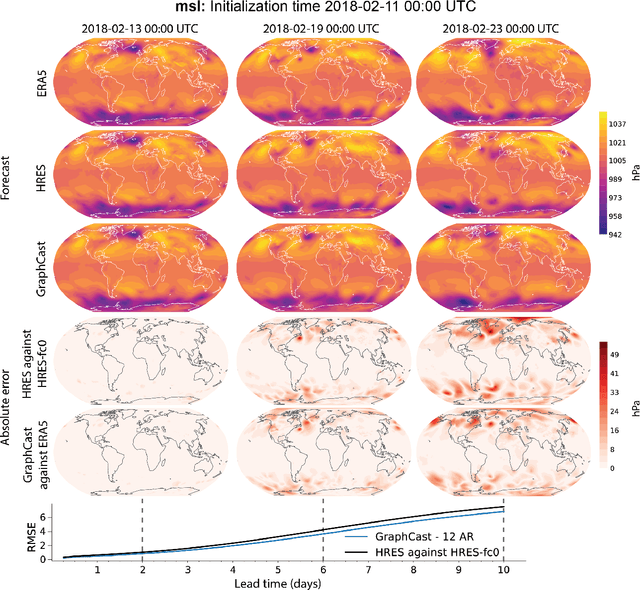
We introduce a machine-learning (ML)-based weather simulator--called "GraphCast"--which outperforms the most accurate deterministic operational medium-range weather forecasting system in the world, as well as all previous ML baselines. GraphCast is an autoregressive model, based on graph neural networks and a novel high-resolution multi-scale mesh representation, which we trained on historical weather data from the European Centre for Medium-Range Weather Forecasts (ECMWF)'s ERA5 reanalysis archive. It can make 10-day forecasts, at 6-hour time intervals, of five surface variables and six atmospheric variables, each at 37 vertical pressure levels, on a 0.25-degree latitude-longitude grid, which corresponds to roughly 25 x 25 kilometer resolution at the equator. Our results show GraphCast is more accurate than ECMWF's deterministic operational forecasting system, HRES, on 90.0% of the 2760 variable and lead time combinations we evaluated. GraphCast also outperforms the most accurate previous ML-based weather forecasting model on 99.2% of the 252 targets it reported. GraphCast can generate a 10-day forecast (35 gigabytes of data) in under 60 seconds on Cloud TPU v4 hardware. Unlike traditional forecasting methods, ML-based forecasting scales well with data: by training on bigger, higher quality, and more recent data, the skill of the forecasts can improve. Together these results represent a key step forward in complementing and improving weather modeling with ML, open new opportunities for fast, accurate forecasting, and help realize the promise of ML-based simulation in the physical sciences.
MultiScale MeshGraphNets
Oct 02, 2022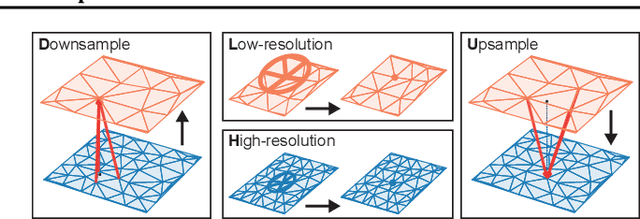
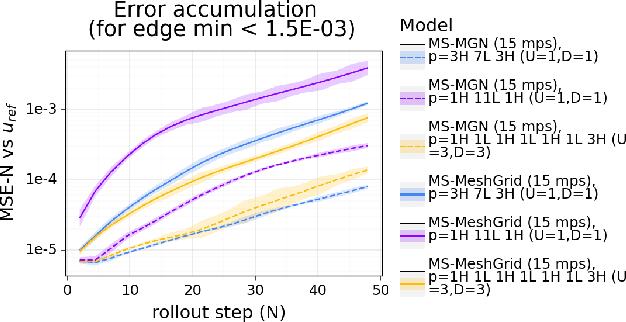
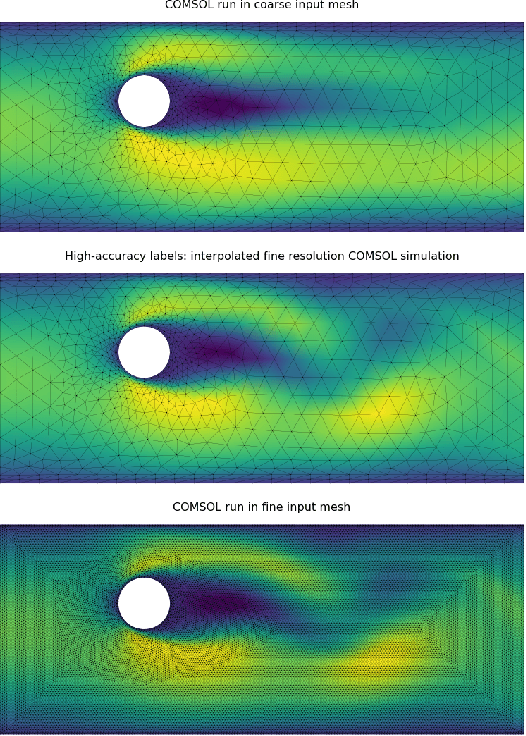
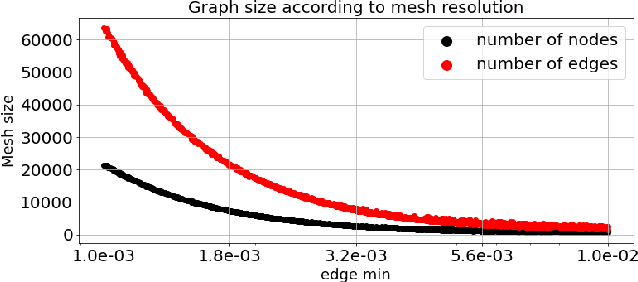
In recent years, there has been a growing interest in using machine learning to overcome the high cost of numerical simulation, with some learned models achieving impressive speed-ups over classical solvers whilst maintaining accuracy. However, these methods are usually tested at low-resolution settings, and it remains to be seen whether they can scale to the costly high-resolution simulations that we ultimately want to tackle. In this work, we propose two complementary approaches to improve the framework from MeshGraphNets, which demonstrated accurate predictions in a broad range of physical systems. MeshGraphNets relies on a message passing graph neural network to propagate information, and this structure becomes a limiting factor for high-resolution simulations, as equally distant points in space become further apart in graph space. First, we demonstrate that it is possible to learn accurate surrogate dynamics of a high-resolution system on a much coarser mesh, both removing the message passing bottleneck and improving performance; and second, we introduce a hierarchical approach (MultiScale MeshGraphNets) which passes messages on two different resolutions (fine and coarse), significantly improving the accuracy of MeshGraphNets while requiring less computational resources.
Learning Mesh-Based Simulation with Graph Networks
Oct 07, 2020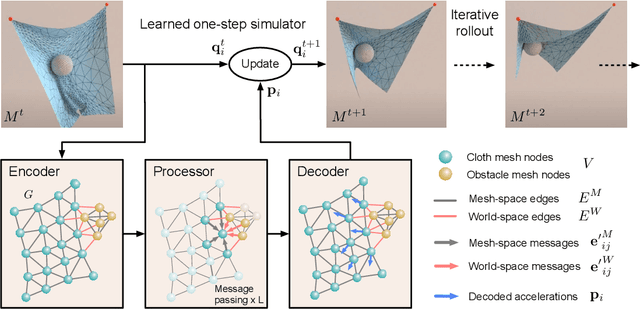


Mesh-based simulations are central to modeling complex physical systems in many disciplines across science and engineering. Mesh representations support powerful numerical integration methods and their resolution can be adapted to strike favorable trade-offs between accuracy and efficiency. However, high-dimensional scientific simulations are very expensive to run, and solvers and parameters must often be tuned individually to each system studied. Here we introduce MeshGraphNets, a framework for learning mesh-based simulations using graph neural networks. Our model can be trained to pass messages on a mesh graph and to adapt the mesh discretization during forward simulation. Our results show it can accurately predict the dynamics of a wide range of physical systems, including aerodynamics, structural mechanics, and cloth. The model's adaptivity supports learning resolution-independent dynamics and can scale to more complex state spaces at test time. Our method is also highly efficient, running 1-2 orders of magnitude faster than the simulation on which it is trained. Our approach broadens the range of problems on which neural network simulators can operate and promises to improve the efficiency of complex, scientific modeling tasks.
Generalization of Reinforcement Learners with Working and Episodic Memory
Oct 29, 2019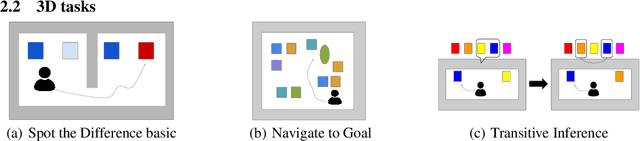
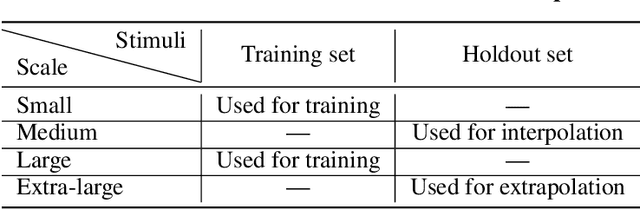
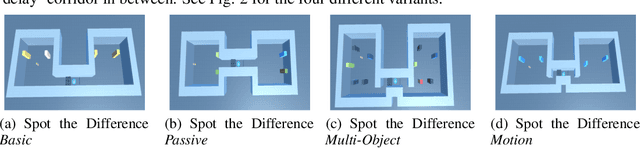
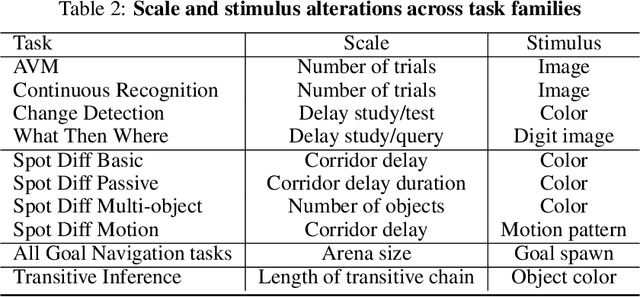
Memory is an important aspect of intelligence and plays a role in many deep reinforcement learning models. However, little progress has been made in understanding when specific memory systems help more than others and how well they generalize. The field also has yet to see a prevalent consistent and rigorous approach for evaluating agent performance on holdout data. In this paper, we aim to develop a comprehensive methodology to test different kinds of memory in an agent and assess how well the agent can apply what it learns in training to a holdout set that differs from the training set along dimensions that we suggest are relevant for evaluating memory-specific generalization. To that end, we first construct a diverse set of memory tasks that allow us to evaluate test-time generalization across multiple dimensions. Second, we develop and perform multiple ablations on an agent architecture that combines multiple memory systems, observe its baseline models, and investigate its performance against the task suite.
Interval timing in deep reinforcement learning agents
May 31, 2019
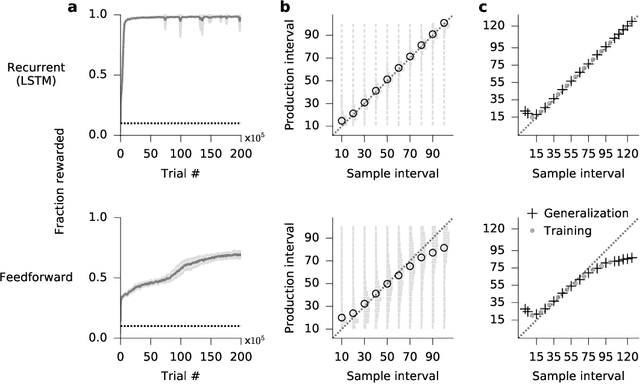
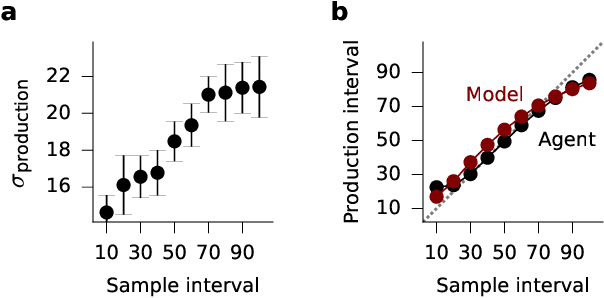
The measurement of time is central to intelligent behavior. We know that both animals and artificial agents can successfully use temporal dependencies to select actions. In artificial agents, little work has directly addressed (1) which architectural components are necessary for successful development of this ability, (2) how this timing ability comes to be represented in the units and actions of the agent, and (3) whether the resulting behavior of the system converges on solutions similar to those of biology. Here we studied interval timing abilities in deep reinforcement learning agents trained end-to-end on an interval reproduction paradigm inspired by experimental literature on mechanisms of timing. We characterize the strategies developed by recurrent and feedforward agents, which both succeed at temporal reproduction using distinct mechanisms, some of which bear specific and intriguing similarities to biological systems. These findings advance our understanding of how agents come to represent time, and they highlight the value of experimentally inspired approaches to characterizing agent abilities.
Bayesian Recurrent Neural Networks
Mar 21, 2018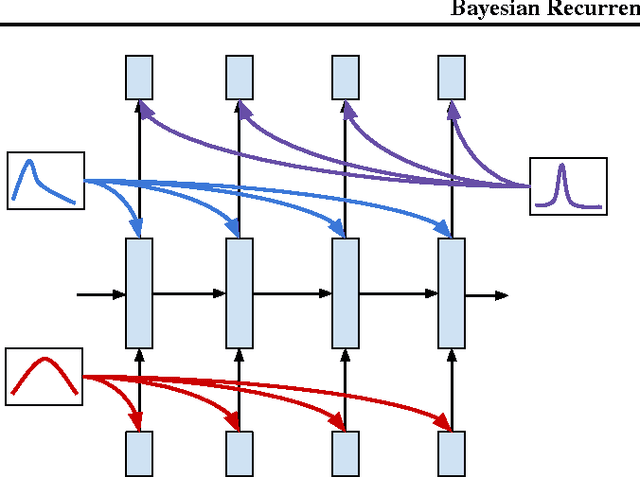
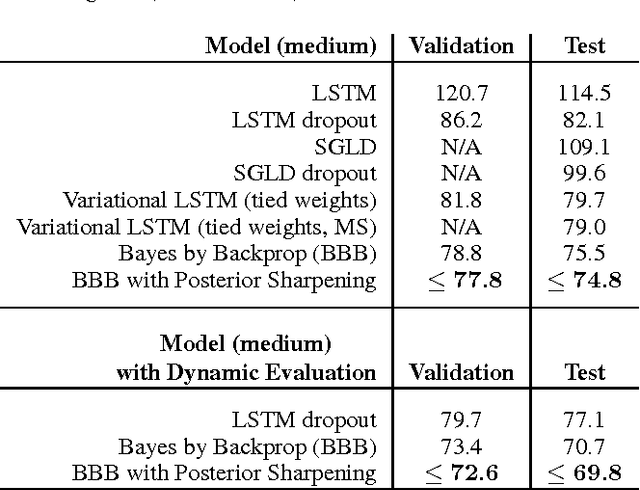


In this work we explore a straightforward variational Bayes scheme for Recurrent Neural Networks. Firstly, we show that a simple adaptation of truncated backpropagation through time can yield good quality uncertainty estimates and superior regularisation at only a small extra computational cost during training, also reducing the amount of parameters by 80\%. Secondly, we demonstrate how a novel kind of posterior approximation yields further improvements to the performance of Bayesian RNNs. We incorporate local gradient information into the approximate posterior to sharpen it around the current batch statistics. We show how this technique is not exclusive to recurrent neural networks and can be applied more widely to train Bayesian neural networks. We also empirically demonstrate how Bayesian RNNs are superior to traditional RNNs on a language modelling benchmark and an image captioning task, as well as showing how each of these methods improve our model over a variety of other schemes for training them. We also introduce a new benchmark for studying uncertainty for language models so future methods can be easily compared.
Noisy Networks for Exploration
Feb 15, 2018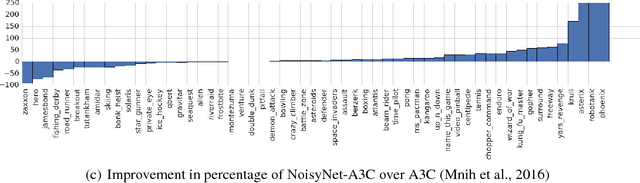
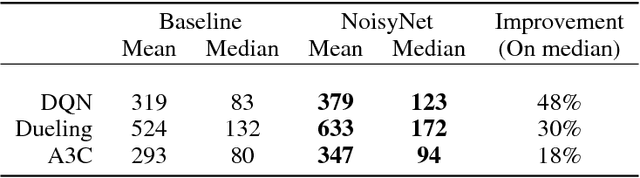
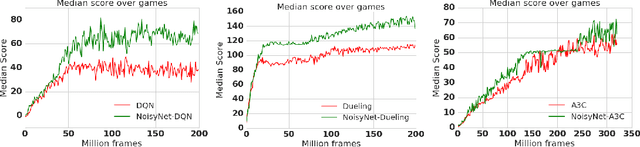
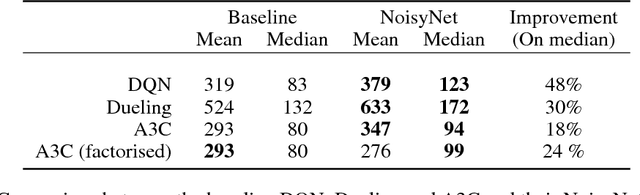
We introduce NoisyNet, a deep reinforcement learning agent with parametric noise added to its weights, and show that the induced stochasticity of the agent's policy can be used to aid efficient exploration. The parameters of the noise are learned with gradient descent along with the remaining network weights. NoisyNet is straightforward to implement and adds little computational overhead. We find that replacing the conventional exploration heuristics for A3C, DQN and dueling agents (entropy reward and $\epsilon$-greedy respectively) with NoisyNet yields substantially higher scores for a wide range of Atari games, in some cases advancing the agent from sub to super-human performance.
Pointer Networks
Jan 02, 2017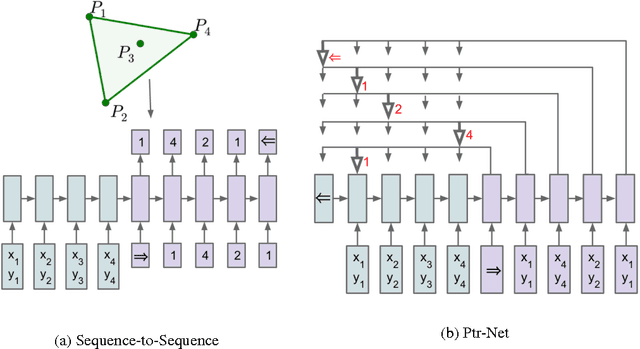


We introduce a new neural architecture to learn the conditional probability of an output sequence with elements that are discrete tokens corresponding to positions in an input sequence. Such problems cannot be trivially addressed by existent approaches such as sequence-to-sequence and Neural Turing Machines, because the number of target classes in each step of the output depends on the length of the input, which is variable. Problems such as sorting variable sized sequences, and various combinatorial optimization problems belong to this class. Our model solves the problem of variable size output dictionaries using a recently proposed mechanism of neural attention. It differs from the previous attention attempts in that, instead of using attention to blend hidden units of an encoder to a context vector at each decoder step, it uses attention as a pointer to select a member of the input sequence as the output. We call this architecture a Pointer Net (Ptr-Net). We show Ptr-Nets can be used to learn approximate solutions to three challenging geometric problems -- finding planar convex hulls, computing Delaunay triangulations, and the planar Travelling Salesman Problem -- using training examples alone. Ptr-Nets not only improve over sequence-to-sequence with input attention, but also allow us to generalize to variable size output dictionaries. We show that the learnt models generalize beyond the maximum lengths they were trained on. We hope our results on these tasks will encourage a broader exploration of neural learning for discrete problems.