 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning human behaviors from motion capture by adversarial imitation
Paper and Code
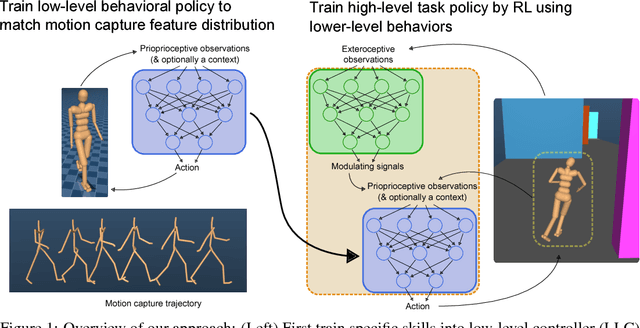
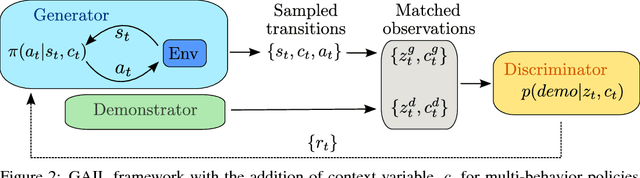
Rapid progress in deep reinforcement learning has made it increasingly feasible to train controllers for high-dimensional humanoid bodies. However, methods that use pure reinforcement learning with simple reward functions tend to produce non-humanlike and overly stereotyped movement behaviors. In this work, we extend generative adversarial imitation learning to enable training of generic neural network policies to produce humanlike movement patterns from limited demonstrations consisting only of partially observed state features, without access to actions, even when the demonstrations come from a body with different and unknown physical parameters. We leverage this approach to build sub-skill policies from motion capture data and show that they can be reused to solve tasks when controlled by a higher level controller.