 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Apr 26, 2023We investigate whether Deep Reinforcement Learning (Deep RL) is able to synthesize sophisticated and safe movement skills for a low-cost, miniature humanoid robot that can be composed into complex behavioral strategies in dynamic environments. We used Deep RL to train a humanoid robot with 20 actuated joints to play a simplified one-versus-one (1v1) soccer game. We first trained individual skills in isolation and then composed those skills end-to-end in a self-play setting. The resulting policy exhibits robust and dynamic movement skills such as rapid fall recovery, walking, turning, kicking and more; and transitions between them in a smooth, stable, and efficient manner - well beyond what is intuitively expected from the robot. The agents also developed a basic strategic understanding of the game, and learned, for instance, to anticipate ball movements and to block opponent shots. The full range of behaviors emerged from a small set of simple rewards. Our agents were trained in simulation and transferred to real robots zero-shot. We found that a combination of sufficiently high-frequency control, targeted dynamics randomization, and perturbations during training in simulation enabled good-quality transfer, despite significant unmodeled effects and variations across robot instances. Although the robots are inherently fragile, minor hardware modifications together with basic regularization of the behavior during training led the robots to learn safe and effective movements while still performing in a dynamic and agile way. Indeed, even though the agents were optimized for scoring, in experiments they walked 156% faster, took 63% less time to get up, and kicked 24% faster than a scripted baseline, while efficiently combining the skills to achieve the longer term objectives. Examples of the emergent behaviors and full 1v1 matches are available on the supplementary website.
SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
Dec 03, 2022


The ability to effectively reuse prior knowledge is a key requirement when building general and flexible Reinforcement Learning (RL) agents. Skill reuse is one of the most common approaches, but current methods have considerable limitations.For example, fine-tuning an existing policy frequently fails, as the policy can degrade rapidly early in training. In a similar vein, distillation of expert behavior can lead to poor results when given sub-optimal experts. We compare several common approaches for skill transfer on multiple domains including changes in task and system dynamics. We identify how existing methods can fail and introduce an alternative approach to mitigate these problems. Our approach learns to sequence existing temporally-extended skills for exploration but learns the final policy directly from the raw experience. This conceptual split enables rapid adaptation and thus efficient data collection but without constraining the final solution.It significantly outperforms many classical methods across a suite of evaluation tasks and we use a broad set of ablations to highlight the importance of differentc omponents of our method.
NeRF2Real: Sim2real Transfer of Vision-guided Bipedal Motion Skills using Neural Radiance Fields
Oct 10, 2022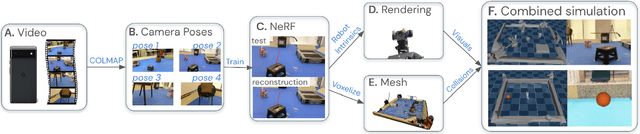
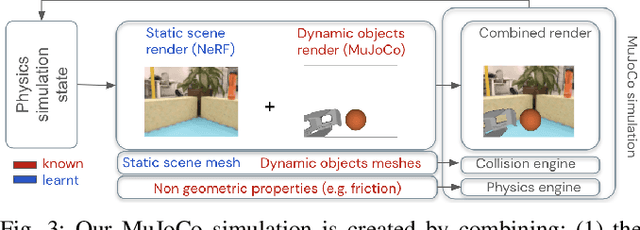
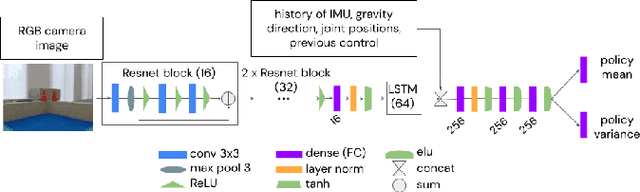
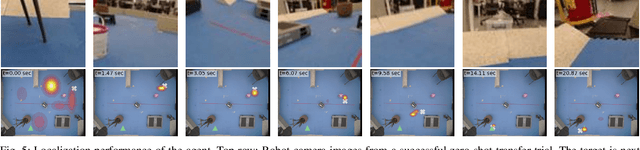
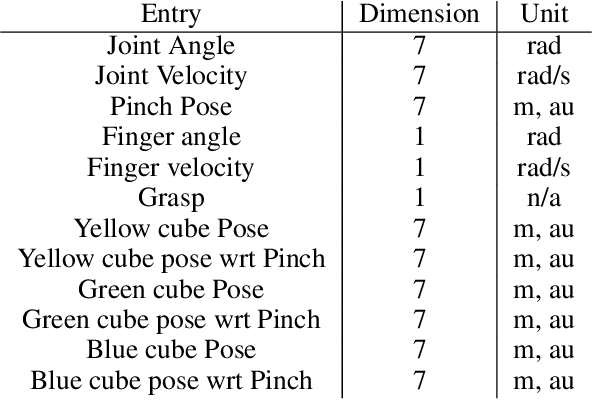
We present a system for applying sim2real approaches to "in the wild" scenes with realistic visuals, and to policies which rely on active perception using RGB cameras. Given a short video of a static scene collected using a generic phone, we learn the scene's contact geometry and a function for novel view synthesis using a Neural Radiance Field (NeRF). We augment the NeRF rendering of the static scene by overlaying the rendering of other dynamic objects (e.g. the robot's own body, a ball). A simulation is then created using the rendering engine in a physics simulator which computes contact dynamics from the static scene geometry (estimated from the NeRF volume density) and the dynamic objects' geometry and physical properties (assumed known). We demonstrate that we can use this simulation to learn vision-based whole body navigation and ball pushing policies for a 20 degrees of freedom humanoid robot with an actuated head-mounted RGB camera, and we successfully transfer these policies to a real robot. Project video is available at https://sites.google.com/view/nerf2real/home
Imitate and Repurpose: Learning Reusable Robot Movement Skills From Human and Animal Behaviors
Mar 31, 2022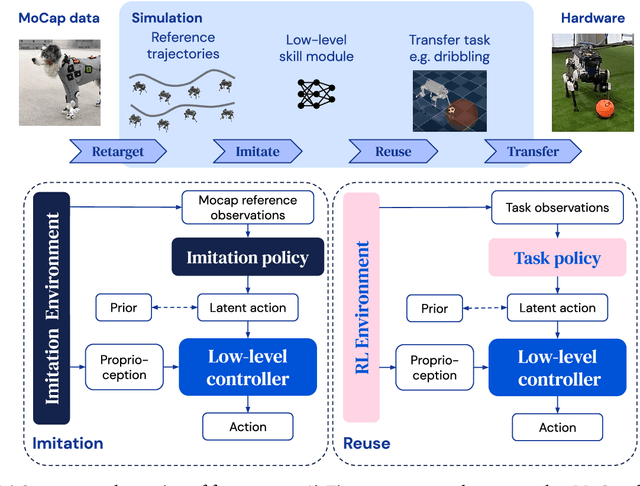
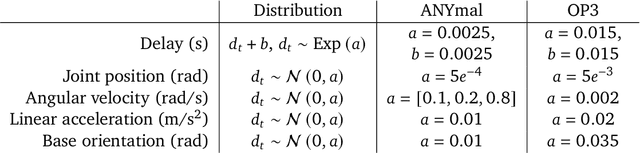
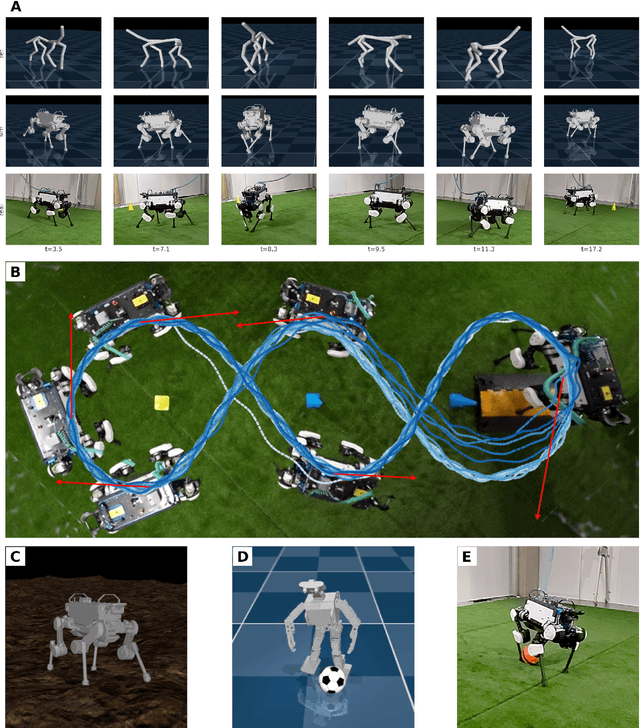
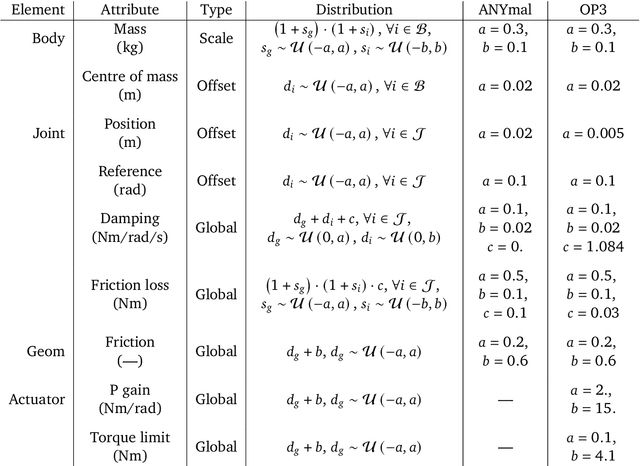
We investigate the use of prior knowledge of human and animal movement to learn reusable locomotion skills for real legged robots. Our approach builds upon previous work on imitating human or dog Motion Capture (MoCap) data to learn a movement skill module. Once learned, this skill module can be reused for complex downstream tasks. Importantly, due to the prior imposed by the MoCap data, our approach does not require extensive reward engineering to produce sensible and natural looking behavior at the time of reuse. This makes it easy to create well-regularized, task-oriented controllers that are suitable for deployment on real robots. We demonstrate how our skill module can be used for imitation, and train controllable walking and ball dribbling policies for both the ANYmal quadruped and OP3 humanoid. These policies are then deployed on hardware via zero-shot simulation-to-reality transfer. Accompanying videos are available at https://bit.ly/robot-npmp.
Learning Transferable Motor Skills with Hierarchical Latent Mixture Policies
Dec 09, 2021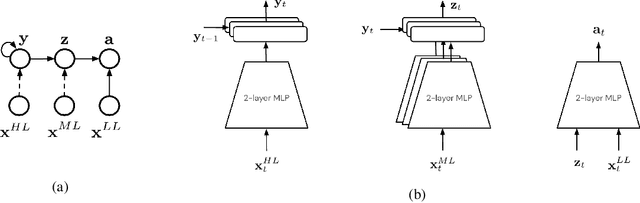
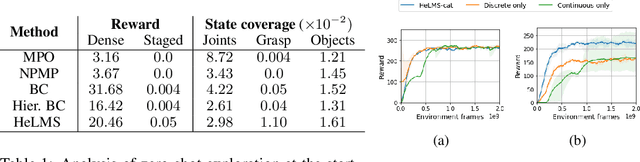

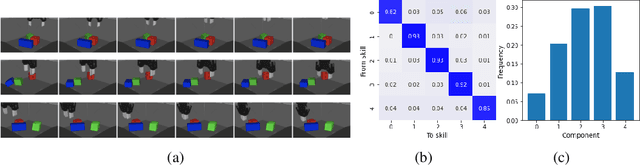
For robots operating in the real world, it is desirable to learn reusable behaviours that can effectively be transferred and adapted to numerous tasks and scenarios. We propose an approach to learn abstract motor skills from data using a hierarchical mixture latent variable model. In contrast to existing work, our method exploits a three-level hierarchy of both discrete and continuous latent variables, to capture a set of high-level behaviours while allowing for variance in how they are executed. We demonstrate in manipulation domains that the method can effectively cluster offline data into distinct, executable behaviours, while retaining the flexibility of a continuous latent variable model. The resulting skills can be transferred and fine-tuned on new tasks, unseen objects, and from state to vision-based policies, yielding better sample efficiency and asymptotic performance compared to existing skill- and imitation-based methods. We further analyse how and when the skills are most beneficial: they encourage directed exploration to cover large regions of the state space relevant to the task, making them most effective in challenging sparse-reward settings.
MuSHR: A Low-Cost, Open-Source Robotic Racecar for Education and Research
Aug 22, 2019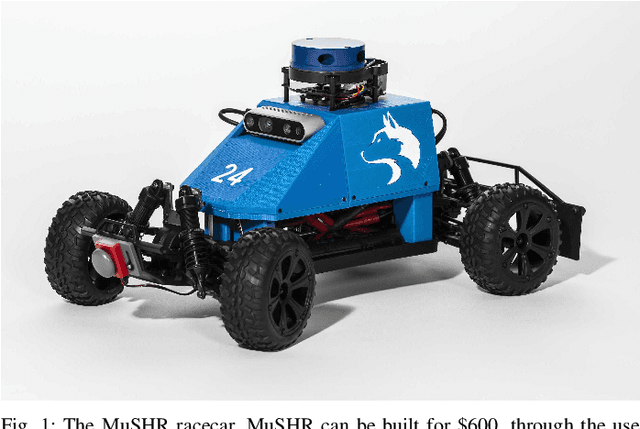

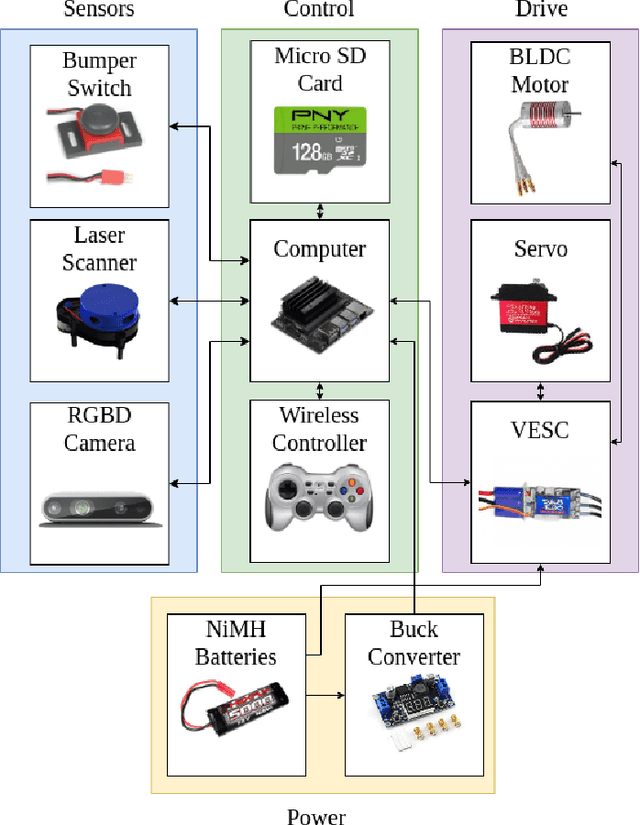
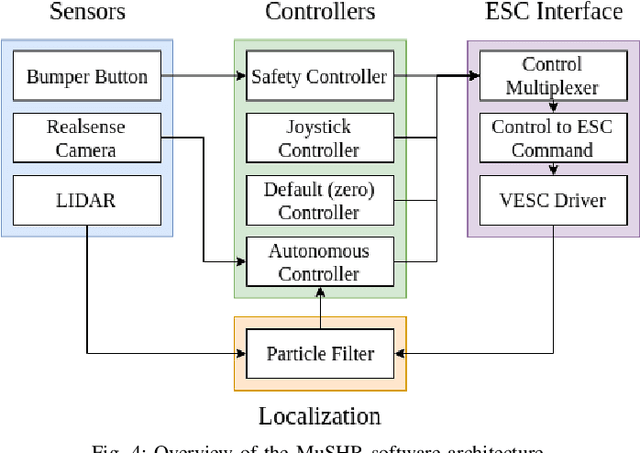
We present MuSHR, the Multi-agent System for non-Holonomic Racing. MuSHR is a low-cost, open-source robotic racecar platform for education and research, developed by the Personal Robotics Lab in the Paul G. Allen School of Computer Science & Engineering at the University of Washington. MuSHR aspires to contribute towards democratizing the field of robotics as a low-cost platform that can be built and deployed by following detailed, open documentation and do-it-yourself tutorials. A set of demos and lab assignments developed for the Mobile Robots course at the University of Washington provide guided, hands-on experience with the platform, and milestones for further development. MuSHR is a valuable asset for academic research labs, robotics instructors, and robotics enthusiasts.
DIViS: Domain Invariant Visual Servoing for Collision-Free Goal Reaching
Feb 18, 2019
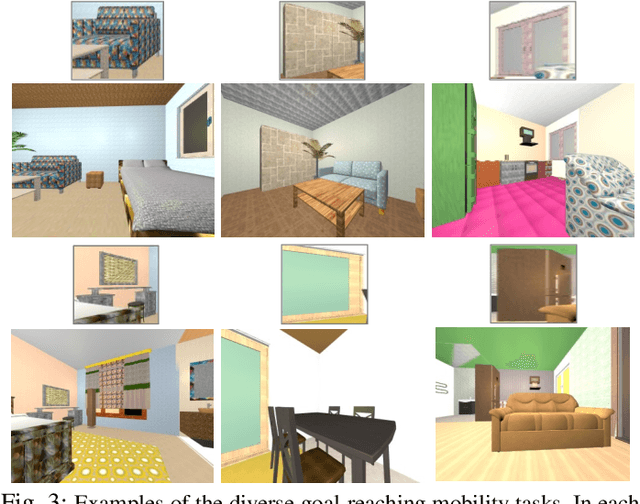
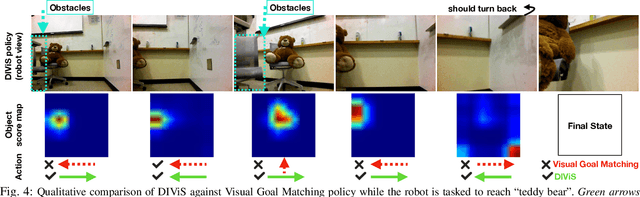
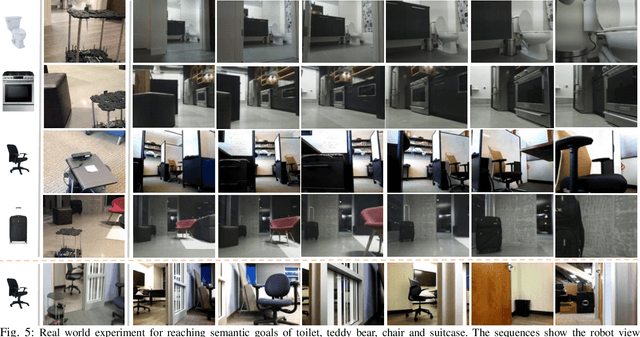
Robots should understand both semantics and physics to be functional in the real world. While robot platforms provide means for interacting with the physical world they cannot autonomously acquire object-level semantics without needing human. In this paper, we investigate how to minimize human effort and intervention to teach robots perform real world tasks that incorporate semantics. We study this question in the context of visual servoing of mobile robots and propose DIViS, a Domain Invariant policy learning approach for collision free Visual Servoing. DIViS incorporates high level semantics from previously collected static human-labeled datasets and learns collision free servoing entirely in simulation and without any real robot data. However, DIViS can directly be deployed on a real robot and is capable of servoing to the user-specified object categories while avoiding collisions in the real world. DIViS is not constrained to be queried by the final view of goal but rather is robust to servo to image goals taken from initial robot view with high occlusions without this impairing its ability to maintain a collision free path. We show the generalization capability of DIViS on real mobile robots in more than 90 real world test scenarios with various unseen object goals in unstructured environments. DIViS is compared to prior approaches via real world experiments and rigorous tests in simulation. For supplementary videos, see: \href{https://fsadeghi.github.io/DIViS}{https://fsadeghi.github.io/DIViS}
Sim2Real View Invariant Visual Servoing by Recurrent Control
Dec 20, 2017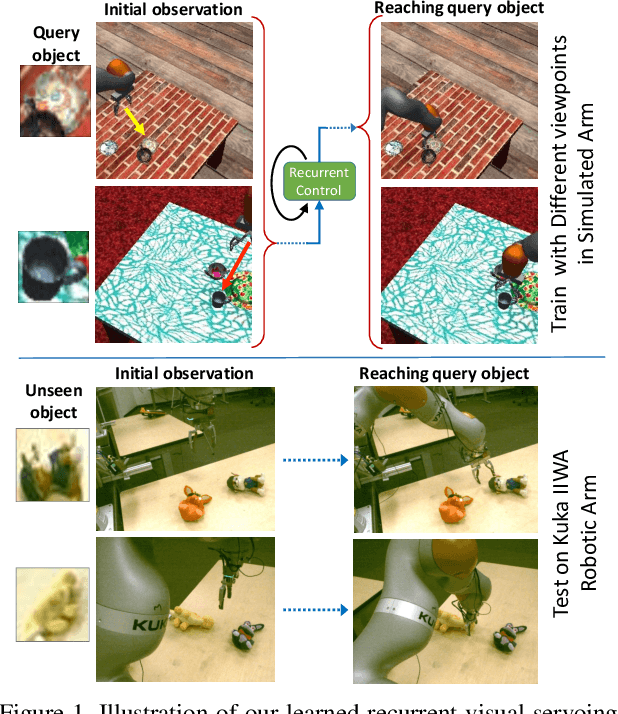
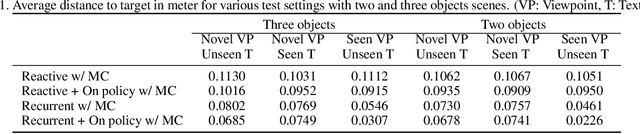
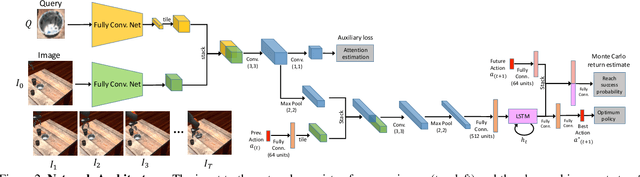
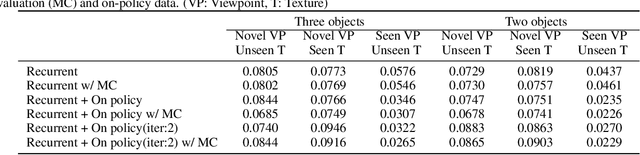
Humans are remarkably proficient at controlling their limbs and tools from a wide range of viewpoints and angles, even in the presence of optical distortions. In robotics, this ability is referred to as visual servoing: moving a tool or end-point to a desired location using primarily visual feedback. In this paper, we study how viewpoint-invariant visual servoing skills can be learned automatically in a robotic manipulation scenario. To this end, we train a deep recurrent controller that can automatically determine which actions move the end-point of a robotic arm to a desired object. The problem that must be solved by this controller is fundamentally ambiguous: under severe variation in viewpoint, it may be impossible to determine the actions in a single feedforward operation. Instead, our visual servoing system must use its memory of past movements to understand how the actions affect the robot motion from the current viewpoint, correcting mistakes and gradually moving closer to the target. This ability is in stark contrast to most visual servoing methods, which either assume known dynamics or require a calibration phase. We show how we can learn this recurrent controller using simulated data and a reinforcement learning objective. We then describe how the resulting model can be transferred to a real-world robot by disentangling perception from control and only adapting the visual layers. The adapted model can servo to previously unseen objects from novel viewpoints on a real-world Kuka IIWA robotic arm. For supplementary videos, see: https://fsadeghi.github.io/Sim2RealViewInvariantServo
CAD2RL: Real Single-Image Flight without a Single Real Image
Jun 08, 2017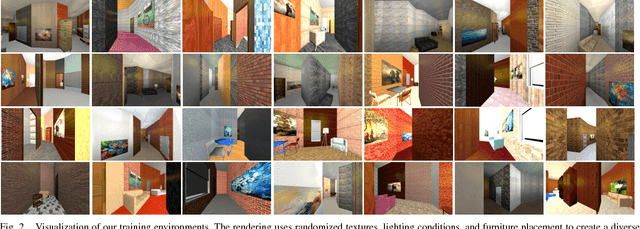
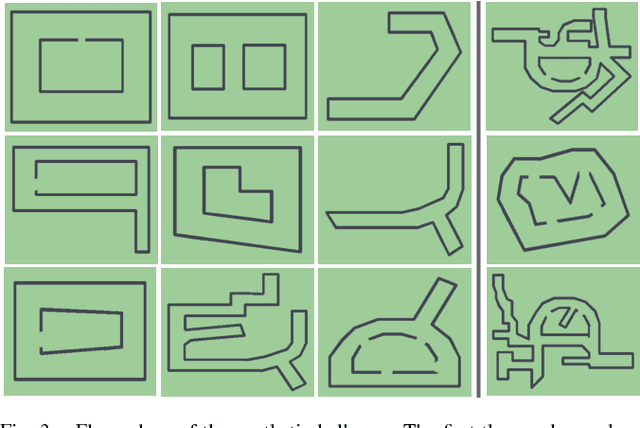
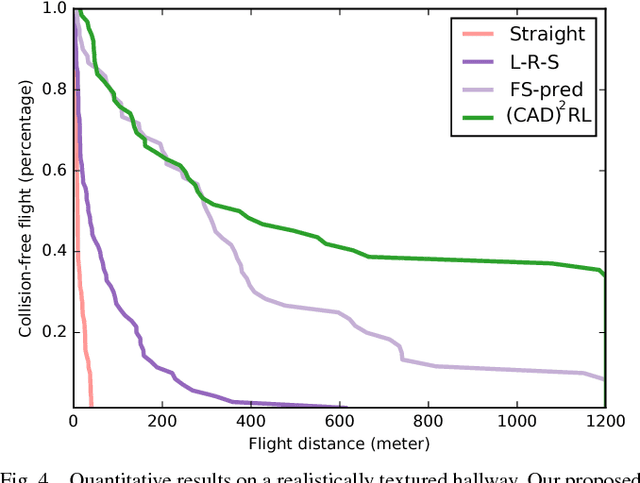
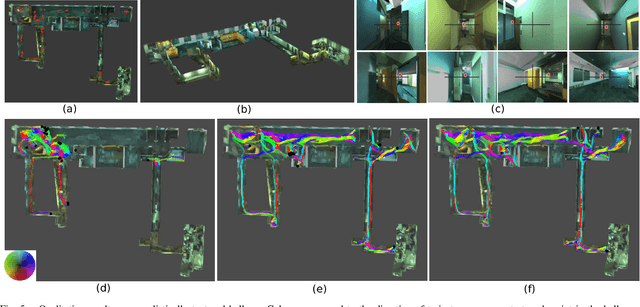
Deep reinforcement learning has emerged as a promising and powerful technique for automatically acquiring control policies that can process raw sensory inputs, such as images, and perform complex behaviors. However, extending deep RL to real-world robotic tasks has proven challenging, particularly in safety-critical domains such as autonomous flight, where a trial-and-error learning process is often impractical. In this paper, we explore the following question: can we train vision-based navigation policies entirely in simulation, and then transfer them into the real world to achieve real-world flight without a single real training image? We propose a learning method that we call CAD$^2$RL, which can be used to perform collision-free indoor flight in the real world while being trained entirely on 3D CAD models. Our method uses single RGB images from a monocular camera, without needing to explicitly reconstruct the 3D geometry of the environment or perform explicit motion planning. Our learned collision avoidance policy is represented by a deep convolutional neural network that directly processes raw monocular images and outputs velocity commands. This policy is trained entirely on simulated images, with a Monte Carlo policy evaluation algorithm that directly optimizes the network's ability to produce collision-free flight. By highly randomizing the rendering settings for our simulated training set, we show that we can train a policy that generalizes to the real world, without requiring the simulator to be particularly realistic or high-fidelity. We evaluate our method by flying a real quadrotor through indoor environments, and further evaluate the design choices in our simulator through a series of ablation studies on depth prediction. For supplementary video see: https://youtu.be/nXBWmzFrj5s
VISALOGY: Answering Visual Analogy Questions
Oct 30, 2015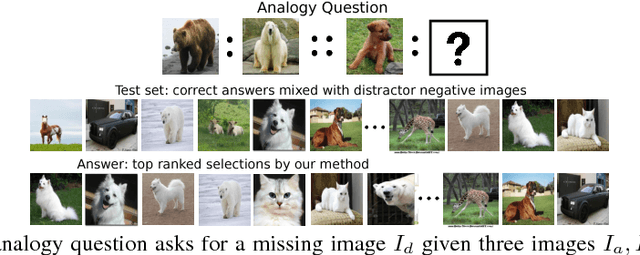
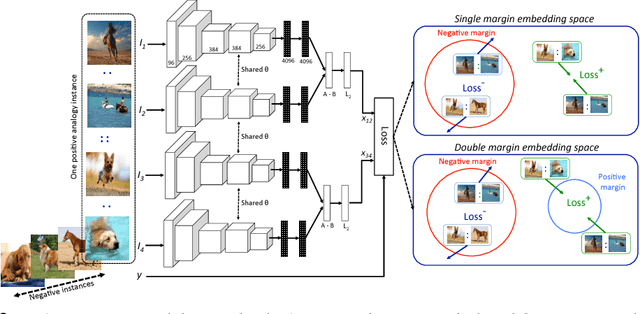
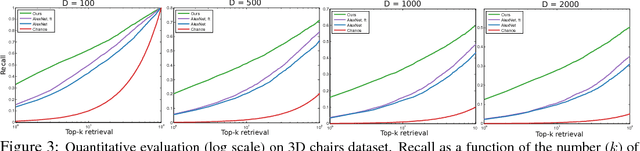
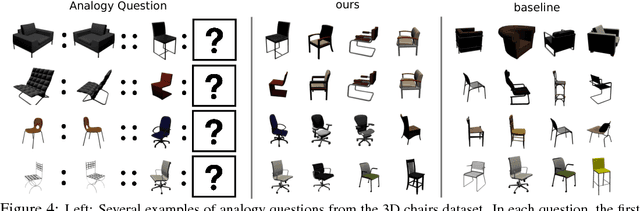
In this paper, we study the problem of answering visual analogy questions. These questions take the form of image A is to image B as image C is to what. Answering these questions entails discovering the mapping from image A to image B and then extending the mapping to image C and searching for the image D such that the relation from A to B holds for C to D. We pose this problem as learning an embedding that encourages pairs of analogous images with similar transformations to be close together using convolutional neural networks with a quadruple Siamese architecture. We introduce a dataset of visual analogy questions in natural images, and show first results of its kind on solving analogy questions on natural images.