 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLyceum: An efficient and scalable ecosystem for robot learning
Jan 21, 2020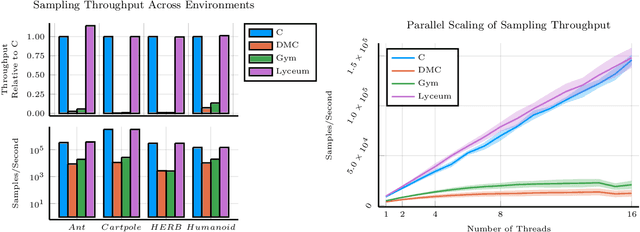
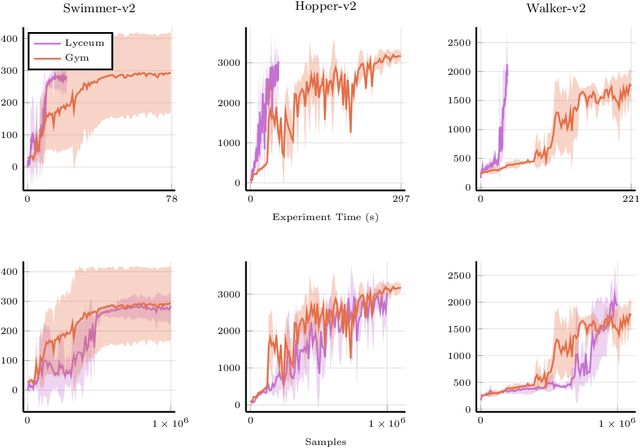
We introduce Lyceum, a high-performance computational ecosystem for robot learning. Lyceum is built on top of the Julia programming language and the MuJoCo physics simulator, combining the ease-of-use of a high-level programming language with the performance of native C. In addition, Lyceum has a straightforward API to support parallel computation across multiple cores and machines. Overall, depending on the complexity of the environment, Lyceum is 5-30x faster compared to other popular abstractions like OpenAI's Gym and DeepMind's dm-control. This substantially reduces training time for various reinforcement learning algorithms; and is also fast enough to support real-time model predictive control through MuJoCo. The code, tutorials, and demonstration videos can be found at: www.lyceum.ml.
MuSHR: A Low-Cost, Open-Source Robotic Racecar for Education and Research
Aug 22, 2019

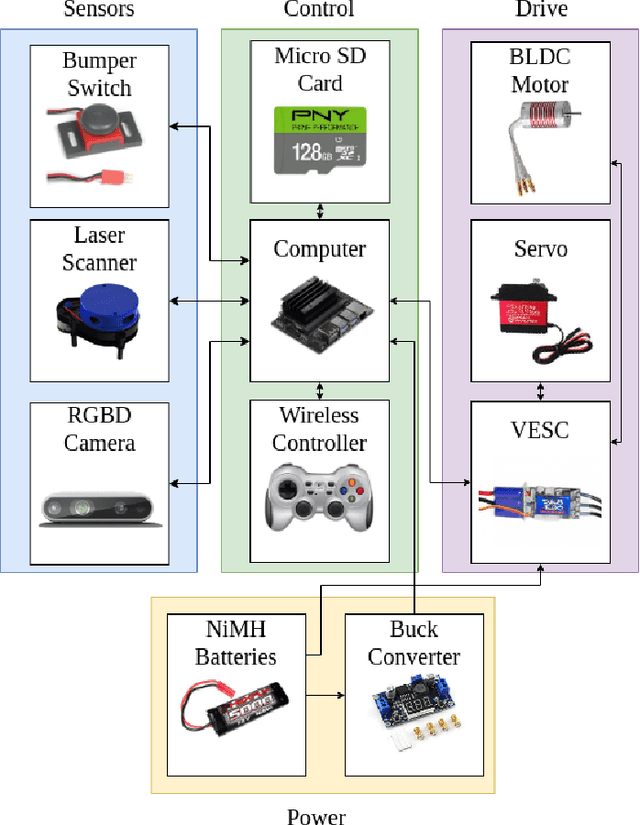
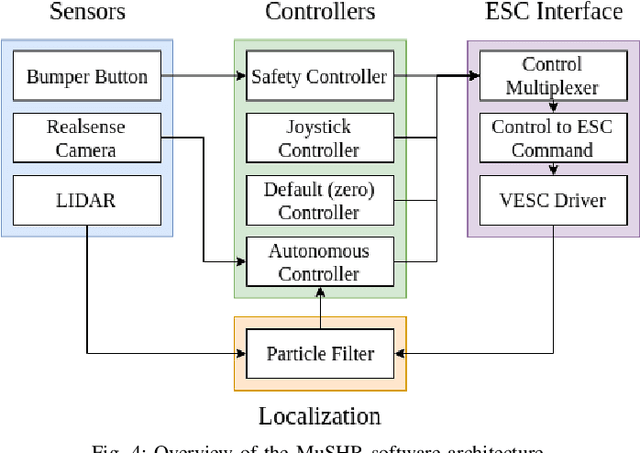
We present MuSHR, the Multi-agent System for non-Holonomic Racing. MuSHR is a low-cost, open-source robotic racecar platform for education and research, developed by the Personal Robotics Lab in the Paul G. Allen School of Computer Science & Engineering at the University of Washington. MuSHR aspires to contribute towards democratizing the field of robotics as a low-cost platform that can be built and deployed by following detailed, open documentation and do-it-yourself tutorials. A set of demos and lab assignments developed for the Mobile Robots course at the University of Washington provide guided, hands-on experience with the platform, and milestones for further development. MuSHR is a valuable asset for academic research labs, robotics instructors, and robotics enthusiasts.