 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectrostatic Clutches Enable High-Force Mechanical Multiplexing: Demonstrating Single-Motor Full-Actuation of a 4-DoF Hand
Jan 14, 2025This paper introduces a novel mechanical multiplexing system powered by electrostatic capstan clutches, enabling high-force, single-motor control of multiple degrees of freedom (DoF). The system is capable of both bidirectional single-input single-output time-division and single-input multiple-output multiplexing to actuate a commercial 4-DoF robotic hand with a single motor. Our mechanical multiplexer is also capable of powerless position holding owing to its use of a leadscrew nut acting as the output. Experimental results demonstrate the effectiveness of this approach, achieving individual and simultaneous actuation. This innovation offers a scalable solution for high-DoF robotic systems, providing a path to efficient actuation in robotic platforms.
Johnsen-Rahbek Capstan Clutch: A High Torque Electrostatic Clutch
Dec 19, 2023In many robotic systems, the holding state consumes power, limits operating time, and increases operating costs. Electrostatic clutches have the potential to improve robotic performance by generating holding torques with low power consumption. The key limitation of electrostatic clutches has been their limited ability to generate the holding torques, or high specific shear stresses needed in many applications. Here we show how combining the Johnsen-Rahbek (JR) effect with the exponential tension scaling capstan effect can produce clutches with the highest specific shear stress in the literature. Our system generated 31.3 N/cm^2 sheer stress and a total holding torque of 7.1 Nm while consuming only 2.5 mW/cm^2 at 500 V. We demonstrate a theoretical model of an electrostatic adhesive capstan clutch and demonstrate how large angle (theta > 2 pi) designs increase efficiency over planar or small angle (theta < pi) clutch designs. We also report the first unfilled polymeric material, polybenzimidazole (PBI), to exhibit the JR-effect.
Stackelberg Games for Learning Emergent Behaviors During Competitive Autocurricula
May 04, 2023



Autocurricular training is an important sub-area of multi-agent reinforcement learning~(MARL) that allows multiple agents to learn emergent skills in an unsupervised co-evolving scheme. The robotics community has experimented autocurricular training with physically grounded problems, such as robust control and interactive manipulation tasks. However, the asymmetric nature of these tasks makes the generation of sophisticated policies challenging. Indeed, the asymmetry in the environment may implicitly or explicitly provide an advantage to a subset of agents which could, in turn, lead to a low-quality equilibrium. This paper proposes a novel game-theoretic algorithm, Stackelberg Multi-Agent Deep Deterministic Policy Gradient (ST-MADDPG), which formulates a two-player MARL problem as a Stackelberg game with one player as the `leader' and the other as the `follower' in a hierarchical interaction structure wherein the leader has an advantage. We first demonstrate that the leader's advantage from ST-MADDPG can be used to alleviate the inherent asymmetry in the environment. By exploiting the leader's advantage, ST-MADDPG improves the quality of a co-evolution process and results in more sophisticated and complex strategies that work well even against an unseen strong opponent.
Improved Object Pose Estimation via Deep Pre-touch Sensing
Apr 09, 2022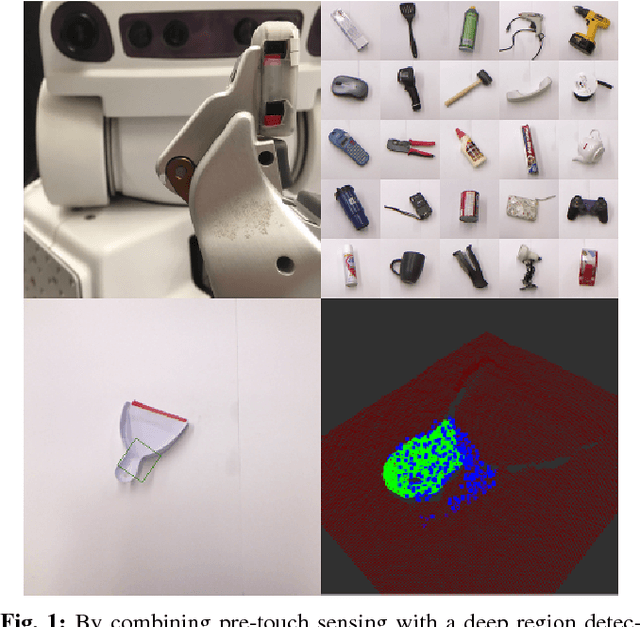
For certain manipulation tasks, object pose estimation from head-mounted cameras may not be sufficiently accurate. This is at least in part due to our inability to perfectly calibrate the coordinate frames of today's high degree of freedom robot arms that link the head to the end-effectors. We present a novel framework combining pre-touch sensing and deep learning to more accurately estimate pose in an efficient manner. The use of pre-touch sensing allows our method to localize the object directly with respect to the robot's end effector, thereby avoiding error caused by miscalibration of the arms. Instead of requiring the robot to scan the entire object with its pre-touch sensor, we use a deep neural network to detect object regions that contain distinctive geometric features. By focusing pre-touch sensing on these regions, the robot can more efficiently gather the information necessary to adjust its original pose estimate. Our region detection network was trained using a new dataset containing objects of widely varying geometries and has been labeled in a scalable fashion that is free from human bias. This dataset is applicable to any task that involves a pre-touch sensor gathering geometric information, and has been made publicly available. We evaluate our framework by having the robot re-estimate the pose of a number of objects of varying geometries. Compared to two simpler region proposal methods, we find that our deep neural network performs significantly better. In addition, we find that after a sequence of scans, objects can typically be localized to within 0.5 cm of their true position. We also observe that the original pose estimate can often be significantly improved after collecting a single quick scan.
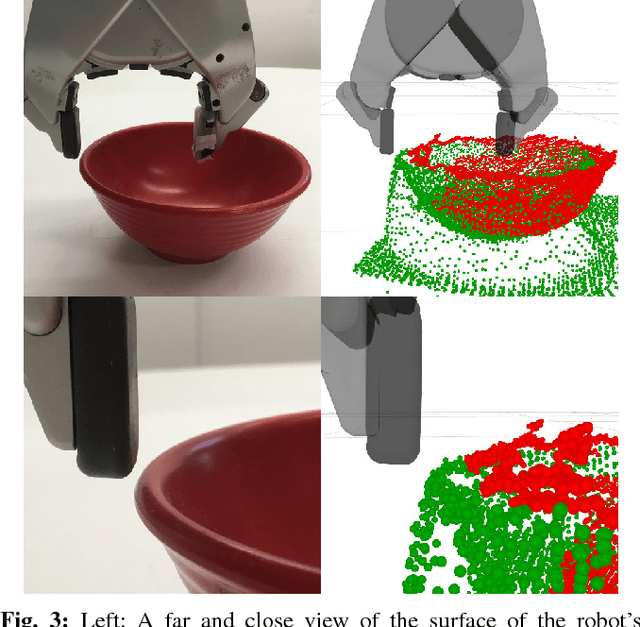
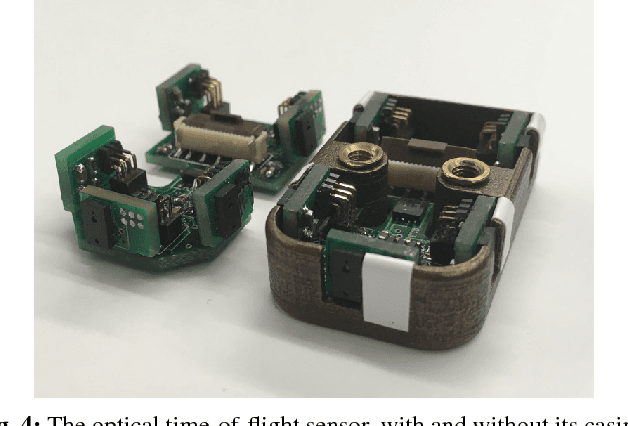
Optical Proximity Sensing for Pose Estimation During In-Hand Manipulation
Apr 05, 2022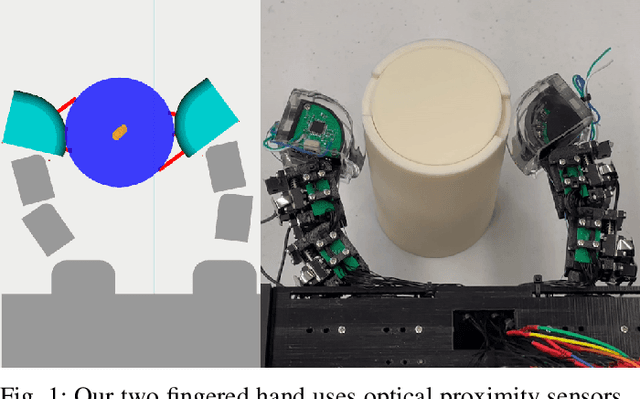
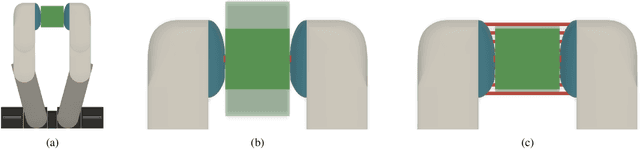
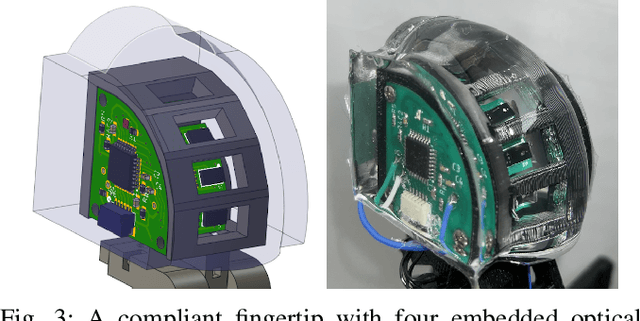
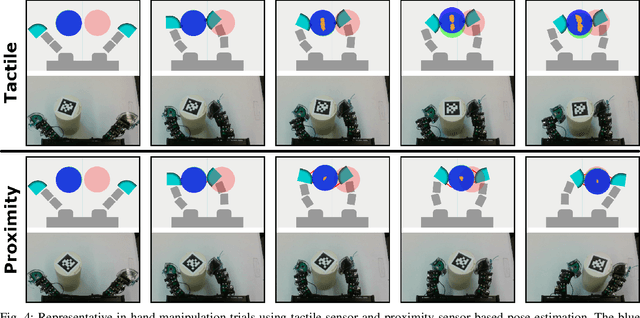
During in-hand manipulation, robots must be able to continuously estimate the pose of the object in order to generate appropriate control actions. The performance of algorithms for pose estimation hinges on the robot's sensors being able to detect discriminative geometric object features, but previous sensing modalities are unable to make such measurements robustly. The robot's fingers can occlude the view of environment- or robot-mounted image sensors, and tactile sensors can only measure at the local areas of contact. Motivated by fingertip-embedded proximity sensors' robustness to occlusion and ability to measure beyond the local areas of contact, we present the first evaluation of proximity sensor based pose estimation for in-hand manipulation. We develop a novel two-fingered hand with fingertip-embedded optical time-of-flight proximity sensors as a testbed for pose estimation during planar in-hand manipulation. Here, the in-hand manipulation task consists of the robot moving a cylindrical object from one end of its workspace to the other. We demonstrate, with statistical significance, that proximity-sensor based pose estimation via particle filtering during in-hand manipulation: a) exhibits 50% lower average pose error than a tactile-sensor based baseline; b) empowers a model predictive controller to achieve 30% lower final positioning error compared to when using tactile-sensor based pose estimates.
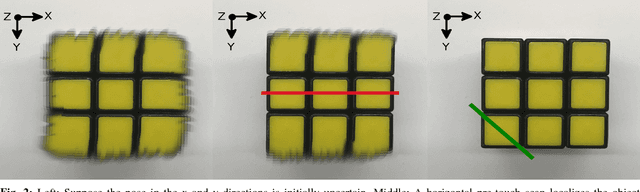
Benchmarking Robot Manipulation with the Rubik's Cube
Feb 14, 2022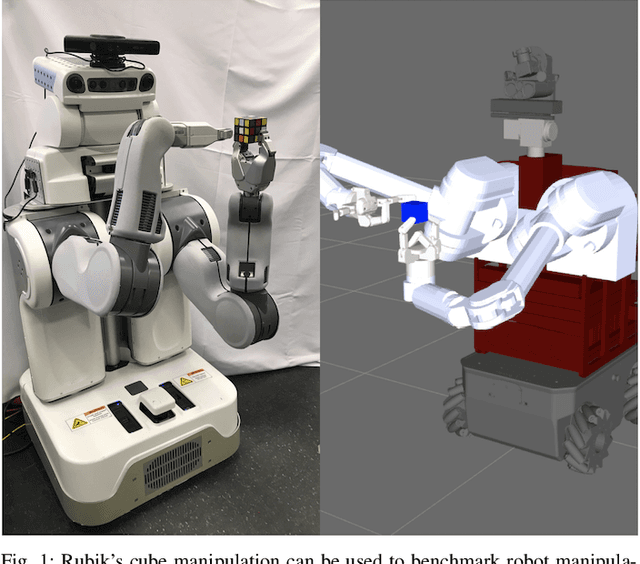
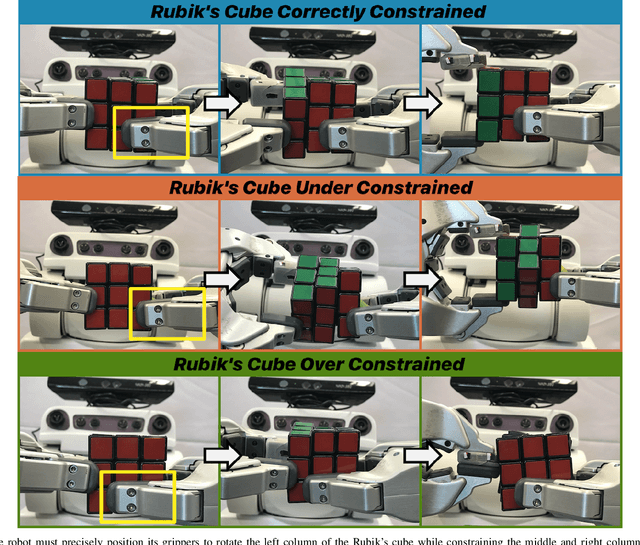
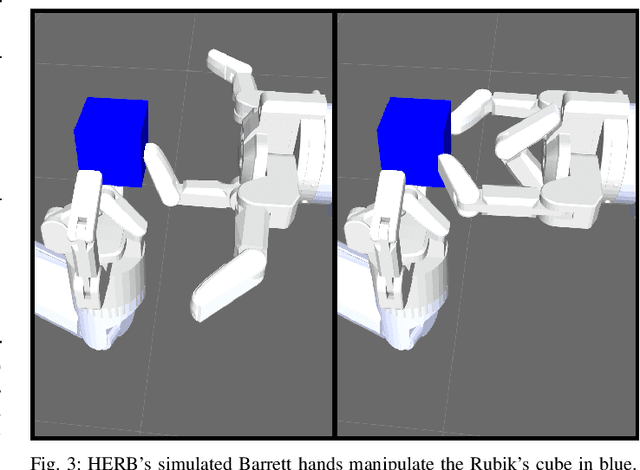
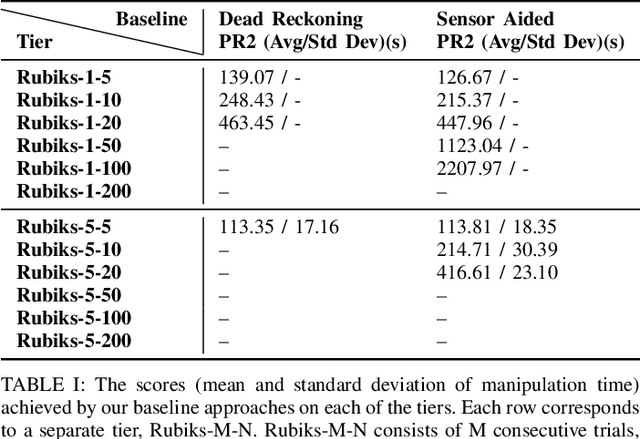
Benchmarks for robot manipulation are crucial to measuring progress in the field, yet there are few benchmarks that demonstrate critical manipulation skills, possess standardized metrics, and can be attempted by a wide array of robot platforms. To address a lack of such benchmarks, we propose Rubik's cube manipulation as a benchmark to measure simultaneous performance of precise manipulation and sequential manipulation. The sub-structure of the Rubik's cube demands precise positioning of the robot's end effectors, while its highly reconfigurable nature enables tasks that require the robot to manage pose uncertainty throughout long sequences of actions. We present a protocol for quantitatively measuring both the accuracy and speed of Rubik's cube manipulation. This protocol can be attempted by any general-purpose manipulator, and only requires a standard 3x3 Rubik's cube and a flat surface upon which the Rubik's cube initially rests (e.g. a table). We demonstrate this protocol for two distinct baseline approaches on a PR2 robot. The first baseline provides a fundamental approach for pose-based Rubik's cube manipulation. The second baseline demonstrates the benchmark's ability to quantify improved performance by the system, particularly that resulting from the integration of pre-touch sensing. To demonstrate the benchmark's applicability to other robot platforms and algorithmic approaches, we present the functional blocks required to enable the HERB robot to manipulate the Rubik's cube via push-grasping.
* IEEE RAL
Motivating Physical Activity via Competitive Human-Robot Interaction
Feb 14, 2022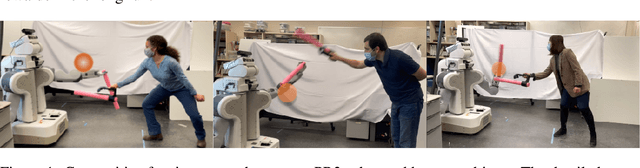
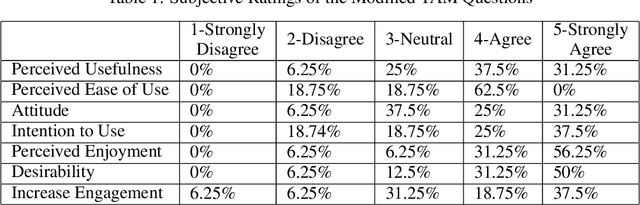
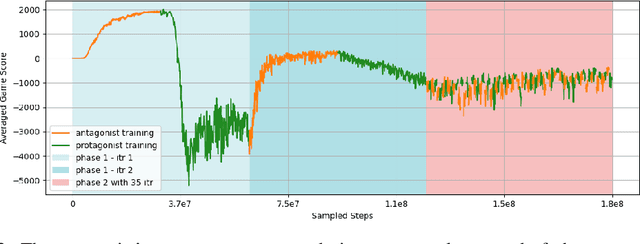
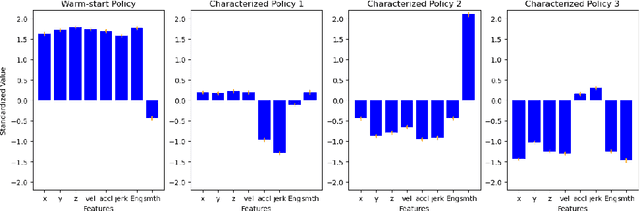
This project aims to motivate research in competitive human-robot interaction by creating a robot competitor that can challenge human users in certain scenarios such as physical exercise and games. With this goal in mind, we introduce the Fencing Game, a human-robot competition used to evaluate both the capabilities of the robot competitor and user experience. We develop the robot competitor through iterative multi-agent reinforcement learning and show that it can perform well against human competitors. Our user study additionally found that our system was able to continuously create challenging and enjoyable interactions that significantly increased human subjects' heart rates. The majority of human subjects considered the system to be entertaining and desirable for improving the quality of their exercise.
Communication by means of Modulated Johnson Noise
Nov 16, 2021

We present the design of a new passive communication method that does not rely on ambient or generated RF sources. Instead, we exploit the Johnson (thermal) noise generated by a resistor to transmit information bits wirelessly. By switching the load connected to an antenna between a resistor and open circuit, we can achieve data rates of up to 26bps and distances of up to 7.3 meters. This communication method is orders of magnitude less power consuming than conventional communication schemes and presents the opportunity to enable wireless communication in areas with a complete lack of connectivity.
No Size Fits All: Automated Radio Configuration for LPWANs
Sep 10, 2021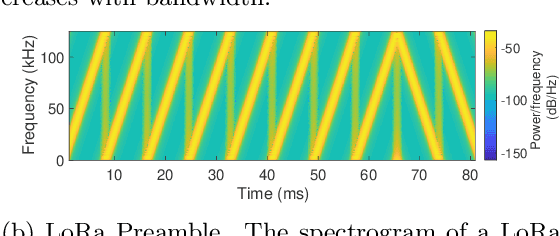

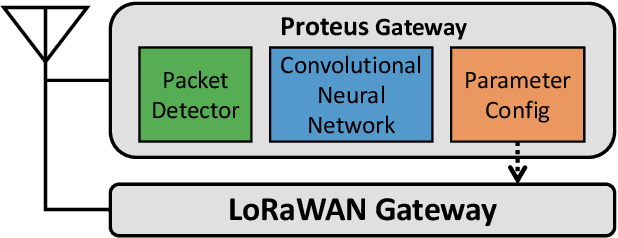
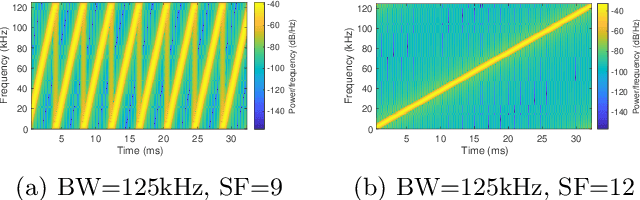
Low power long-range networks like LoRa have become increasingly mainstream for Internet of Things deployments. Given the versatility of applications that these protocols enable, they support many data rates and bandwidths. Yet, for a given network that supports hundreds of devices over multiple miles, the network operator typically needs to specify the same configuration or among a small subset of configurations for all the client devices to communicate with the gateway. This one-size-fits-all approach is highly inefficient in large networks. We propose an alternative approach -- we allow network devices to transmit at any data rate they choose. The gateway uses the first few symbols in the preamble to classify the correct data rate, switches its configuration, and then decodes the data. Our design leverages the inherent asymmetry in outdoor IoT deployments where the clients are power-starved and resource-constrained, but the gateway is not. Our gateway design, Proteus, runs a neural network architecture and is backward compatible with existing LoRa protocols. Our experiments reveal that Proteus can identify the correct configuration with over 97% accuracy in both indoor and outdoor deployments. Our network architecture leads to a 3.8 to 11 times increase in throughput for our LoRa testbed.
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Aug 17, 2021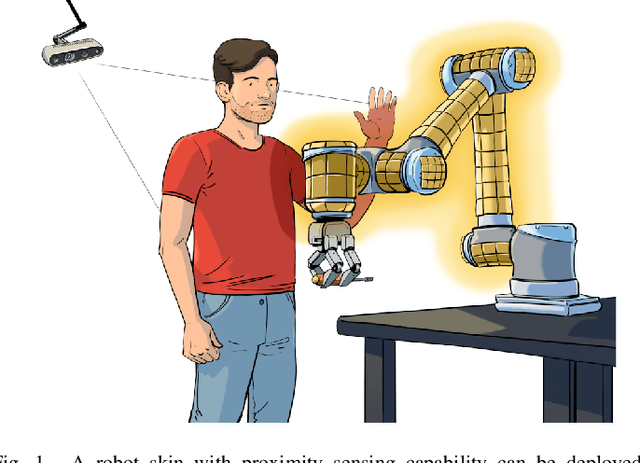

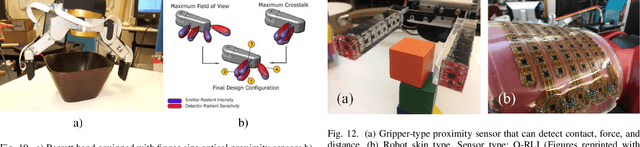

Proximity perception is a technology that has the potential to play an essential role in the future of robotics. It can fulfill the promise of safe, robust, and autonomous systems in industry and everyday life, alongside humans, as well as in remote locations in space and underwater. In this survey paper, we cover the developments of this field from the early days up to the present, with a focus on human-centered robotics. Here, proximity sensors are typically deployed in two scenarios: first, on the exterior of manipulator arms to support safety and interaction functionality, and second, on the inside of grippers or hands to support grasping and exploration. Starting from this observation, we propose a categorization for the approaches found in the literature. To provide a basis for understanding these approaches, we devote effort to present the technologies and different measuring principles that were developed over the years, also providing a summary in form of a table. Then, we show the diversity of applications that have been presented in the literature. Finally, we give an overview of the most important trends that will shape the future of this domain.