 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Capacitive Touch Sensing in Soft Robotics: Achieving Robust Tactile Interactions for Artistic Applications
Mar 04, 2025In this paper, we present a touch technology to achieve tactile interactivity for human-robot interaction (HRI) in soft robotics. By combining a capacitive touch sensor with an online solid mechanics simulation provided by the SOFA framework, contact detection is achieved for arbitrary shapes. Furthermore, the implementation of the capacitive touch technology presented here is selectively sensitive to human touch (conductive objects), while it is largely unaffected by the deformations created by the pneumatic actuation of our soft robot. Multi-touch interactions are also possible. We evaluated our approach with an organic soft robotics sculpture that was created by a visual artist. In particular, we evaluate that the touch localization capabilities are robust under the deformation of the device. We discuss the potential this approach has for the arts and entertainment as well as other domains.
* 8 pages, 17 figures. Accepted at IEEE Robotics and Automation Letters (RA-L) 2025
Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Aug 17, 2021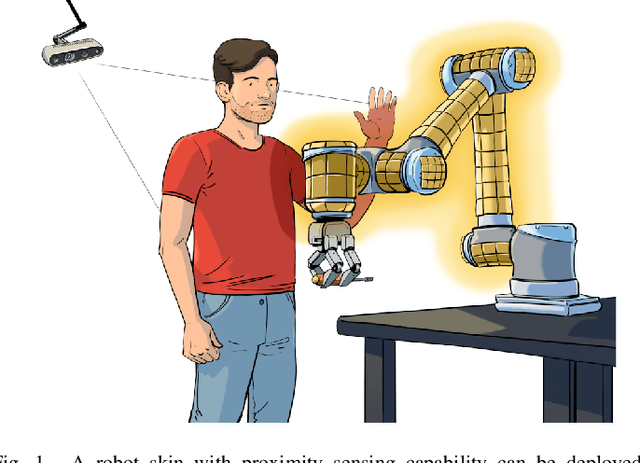

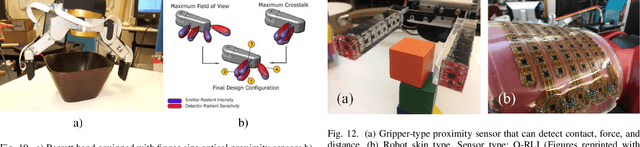

Proximity perception is a technology that has the potential to play an essential role in the future of robotics. It can fulfill the promise of safe, robust, and autonomous systems in industry and everyday life, alongside humans, as well as in remote locations in space and underwater. In this survey paper, we cover the developments of this field from the early days up to the present, with a focus on human-centered robotics. Here, proximity sensors are typically deployed in two scenarios: first, on the exterior of manipulator arms to support safety and interaction functionality, and second, on the inside of grippers or hands to support grasping and exploration. Starting from this observation, we propose a categorization for the approaches found in the literature. To provide a basis for understanding these approaches, we devote effort to present the technologies and different measuring principles that were developed over the years, also providing a summary in form of a table. Then, we show the diversity of applications that have been presented in the literature. Finally, we give an overview of the most important trends that will shape the future of this domain.