 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Robot Manipulation with the Rubik's Cube
Feb 14, 2022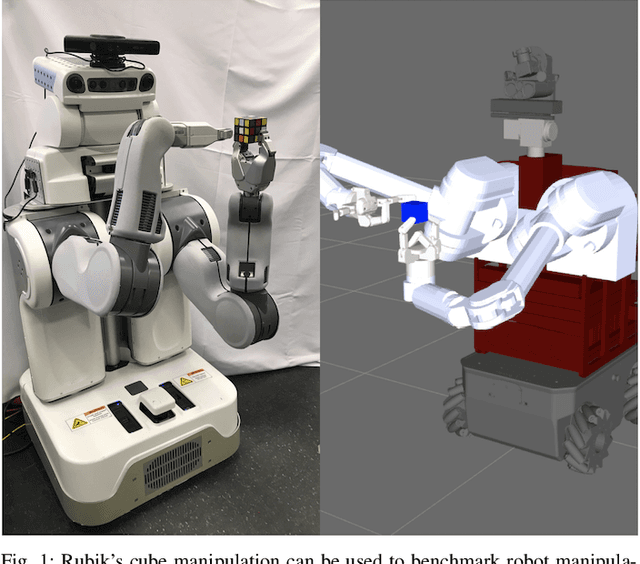
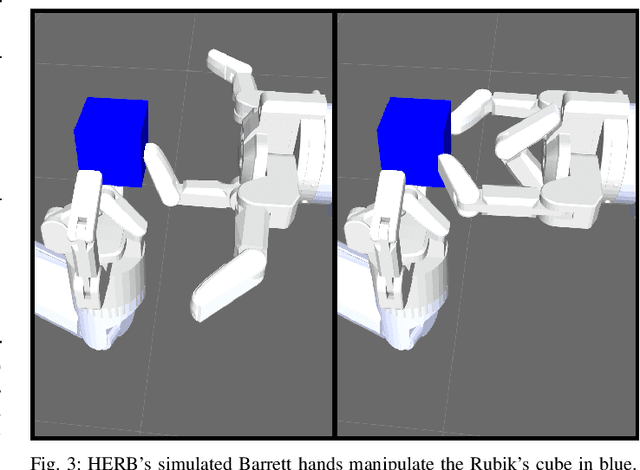
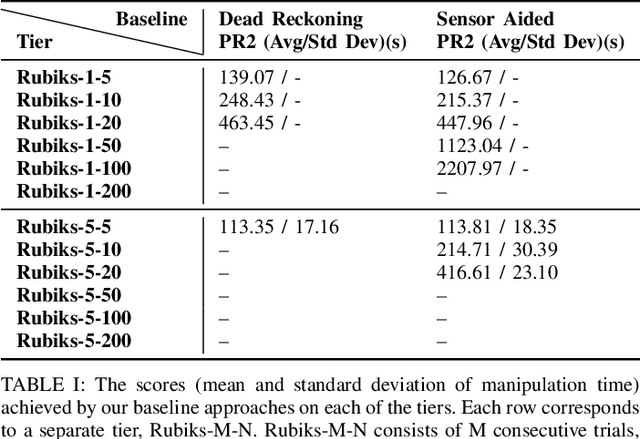
Benchmarks for robot manipulation are crucial to measuring progress in the field, yet there are few benchmarks that demonstrate critical manipulation skills, possess standardized metrics, and can be attempted by a wide array of robot platforms. To address a lack of such benchmarks, we propose Rubik's cube manipulation as a benchmark to measure simultaneous performance of precise manipulation and sequential manipulation. The sub-structure of the Rubik's cube demands precise positioning of the robot's end effectors, while its highly reconfigurable nature enables tasks that require the robot to manage pose uncertainty throughout long sequences of actions. We present a protocol for quantitatively measuring both the accuracy and speed of Rubik's cube manipulation. This protocol can be attempted by any general-purpose manipulator, and only requires a standard 3x3 Rubik's cube and a flat surface upon which the Rubik's cube initially rests (e.g. a table). We demonstrate this protocol for two distinct baseline approaches on a PR2 robot. The first baseline provides a fundamental approach for pose-based Rubik's cube manipulation. The second baseline demonstrates the benchmark's ability to quantify improved performance by the system, particularly that resulting from the integration of pre-touch sensing. To demonstrate the benchmark's applicability to other robot platforms and algorithmic approaches, we present the functional blocks required to enable the HERB robot to manipulate the Rubik's cube via push-grasping.
* IEEE RAL
Motivating Physical Activity via Competitive Human-Robot Interaction
Feb 14, 2022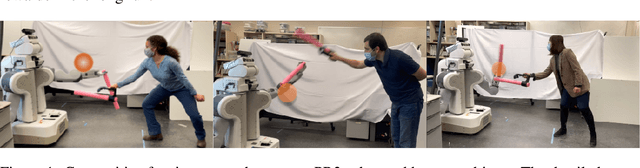
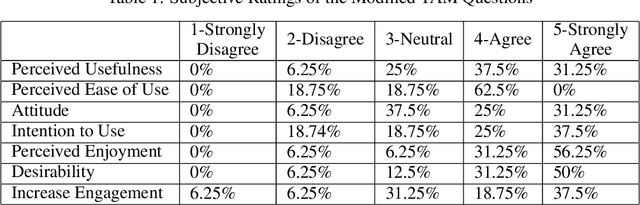
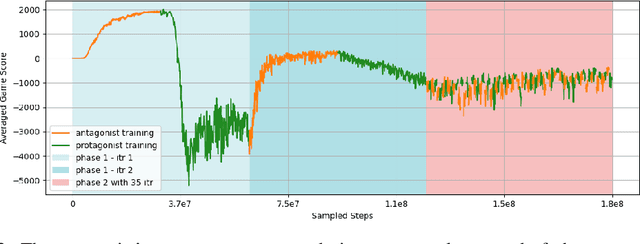
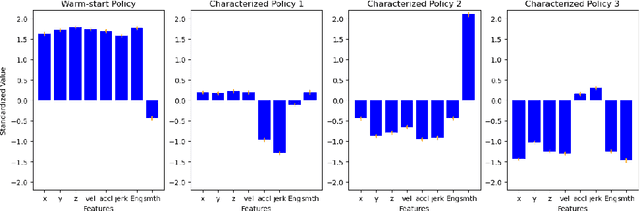
This project aims to motivate research in competitive human-robot interaction by creating a robot competitor that can challenge human users in certain scenarios such as physical exercise and games. With this goal in mind, we introduce the Fencing Game, a human-robot competition used to evaluate both the capabilities of the robot competitor and user experience. We develop the robot competitor through iterative multi-agent reinforcement learning and show that it can perform well against human competitors. Our user study additionally found that our system was able to continuously create challenging and enjoyable interactions that significantly increased human subjects' heart rates. The majority of human subjects considered the system to be entertaining and desirable for improving the quality of their exercise.
Improved Proximity, Contact, and Force Sensing via Optimization of Elastomer-Air Interface Geometry
Sep 30, 2018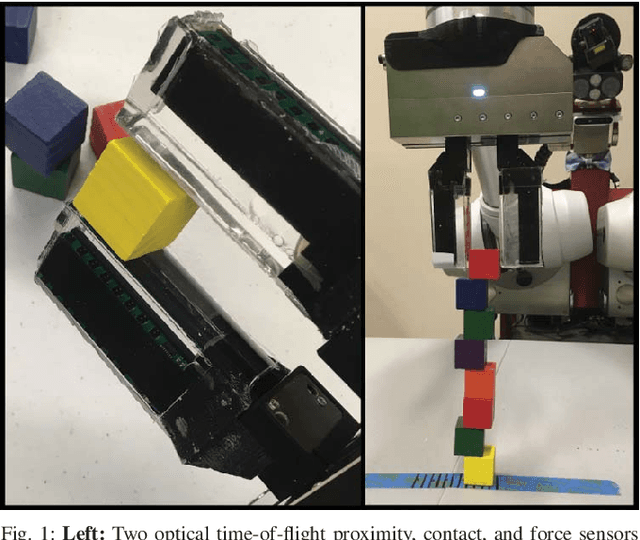
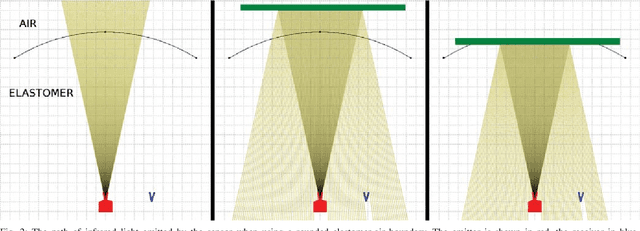
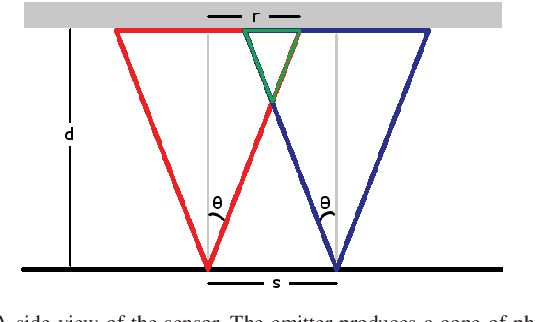
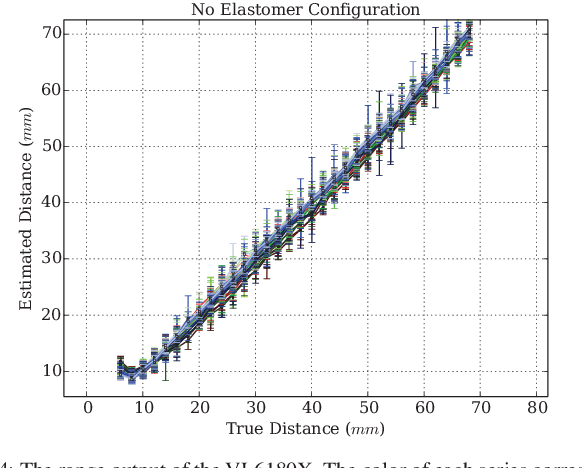
We describe a single fingertip-mounted sensing system for robot manipulation that provides proximity (pre-touch), contact detection (touch), and force sensing (post-touch). The sensor system consists of optical time-of-flight range measurement modules covered in a clear elastomer. Because the elastomer is clear, the sensor can detect and range nearby objects, as well as measure deformations caused by objects that are in contact with the sensor and thereby estimate the applied force. We examine how this sensor design can be improved with respect to invariance to object reflectivity, signal-to-noise ratio, and continuous operation when switching between the distance and force measurement regimes. By harnessing time-of-flight technology and optimizing the elastomer-air boundary to control the emitted light's path, we develop a sensor that is able to seamlessly transition between measuring distances of up to 50mm and contact forces of up to 10 newtons. Furthermore, we provide all hardware design files and software sources, and offer thorough instructions on how to manufacture the sensor from inexpensive, commercially available components.