 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectrostatic Clutches Enable High-Force Mechanical Multiplexing: Demonstrating Single-Motor Full-Actuation of a 4-DoF Hand
Jan 14, 2025This paper introduces a novel mechanical multiplexing system powered by electrostatic capstan clutches, enabling high-force, single-motor control of multiple degrees of freedom (DoF). The system is capable of both bidirectional single-input single-output time-division and single-input multiple-output multiplexing to actuate a commercial 4-DoF robotic hand with a single motor. Our mechanical multiplexer is also capable of powerless position holding owing to its use of a leadscrew nut acting as the output. Experimental results demonstrate the effectiveness of this approach, achieving individual and simultaneous actuation. This innovation offers a scalable solution for high-DoF robotic systems, providing a path to efficient actuation in robotic platforms.
Torsion Resistant Strain Limiting Layers Enable High Grip Strength of Electrically-Driven Handed Shearing Auxetic Grippers
Dec 10, 2024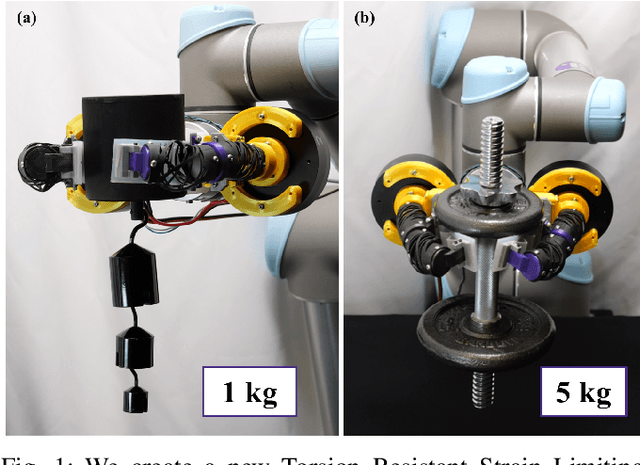



Soft grippers have demonstrated a strong ability to successfully pick and manipulate many objects. A key limitation to their wider adoption is their inability to grasp larger payloads due to objects slipping out of grasps. We have overcome this limitation by introducing a torsionally rigid strain limiting layer (TR-SLL). This reduces out-of-plane bending while maintaining the gripper's softness and in-plane flexibility. We characterize the design space of the strain limiting layer and Handed Shearing Auxetic (HSA) actuators for a soft gripper using simulation and experiment. The inclusion of the TR-SLL with HSAs enables HSA grippers to be made with a single digit. We found that the use of our TR-SLL HSA gripper enabled pinch grasping of payloads over 1 kg. We demonstrate a lifting capacity of 5 kg when loading using the TR-SLL. We also demonstrate a peak pinch grasp force of 5.8 N, and a peak planar caging force of 14.5 N. Finally, we test the TR-SLL gripper on a suite of 43 YCB objects. We show success on 37 objects demonstrating significant capabilities.
Johnsen-Rahbek Capstan Clutch: A High Torque Electrostatic Clutch
Dec 19, 2023In many robotic systems, the holding state consumes power, limits operating time, and increases operating costs. Electrostatic clutches have the potential to improve robotic performance by generating holding torques with low power consumption. The key limitation of electrostatic clutches has been their limited ability to generate the holding torques, or high specific shear stresses needed in many applications. Here we show how combining the Johnsen-Rahbek (JR) effect with the exponential tension scaling capstan effect can produce clutches with the highest specific shear stress in the literature. Our system generated 31.3 N/cm^2 sheer stress and a total holding torque of 7.1 Nm while consuming only 2.5 mW/cm^2 at 500 V. We demonstrate a theoretical model of an electrostatic adhesive capstan clutch and demonstrate how large angle (theta > 2 pi) designs increase efficiency over planar or small angle (theta < pi) clutch designs. We also report the first unfilled polymeric material, polybenzimidazole (PBI), to exhibit the JR-effect.