 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTorsion Resistant Strain Limiting Layers Enable High Grip Strength of Electrically-Driven Handed Shearing Auxetic Grippers
Paper and Code
Dec 10, 2024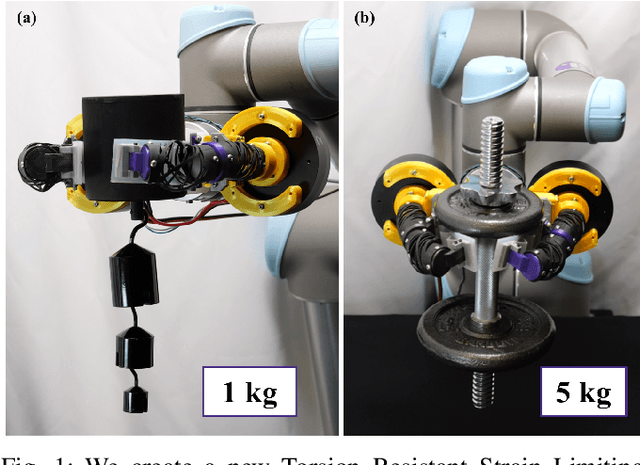



Soft grippers have demonstrated a strong ability to successfully pick and manipulate many objects. A key limitation to their wider adoption is their inability to grasp larger payloads due to objects slipping out of grasps. We have overcome this limitation by introducing a torsionally rigid strain limiting layer (TR-SLL). This reduces out-of-plane bending while maintaining the gripper's softness and in-plane flexibility. We characterize the design space of the strain limiting layer and Handed Shearing Auxetic (HSA) actuators for a soft gripper using simulation and experiment. The inclusion of the TR-SLL with HSAs enables HSA grippers to be made with a single digit. We found that the use of our TR-SLL HSA gripper enabled pinch grasping of payloads over 1 kg. We demonstrate a lifting capacity of 5 kg when loading using the TR-SLL. We also demonstrate a peak pinch grasp force of 5.8 N, and a peak planar caging force of 14.5 N. Finally, we test the TR-SLL gripper on a suite of 43 YCB objects. We show success on 37 objects demonstrating significant capabilities.