 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Transferable Motor Skills with Hierarchical Latent Mixture Policies
Paper and Code
Dec 09, 2021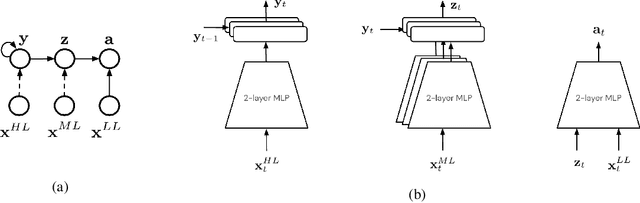

For robots operating in the real world, it is desirable to learn reusable behaviours that can effectively be transferred and adapted to numerous tasks and scenarios. We propose an approach to learn abstract motor skills from data using a hierarchical mixture latent variable model. In contrast to existing work, our method exploits a three-level hierarchy of both discrete and continuous latent variables, to capture a set of high-level behaviours while allowing for variance in how they are executed. We demonstrate in manipulation domains that the method can effectively cluster offline data into distinct, executable behaviours, while retaining the flexibility of a continuous latent variable model. The resulting skills can be transferred and fine-tuned on new tasks, unseen objects, and from state to vision-based policies, yielding better sample efficiency and asymptotic performance compared to existing skill- and imitation-based methods. We further analyse how and when the skills are most beneficial: they encourage directed exploration to cover large regions of the state space relevant to the task, making them most effective in challenging sparse-reward settings.