 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitate and Repurpose: Learning Reusable Robot Movement Skills From Human and Animal Behaviors
Paper and Code
Mar 31, 2022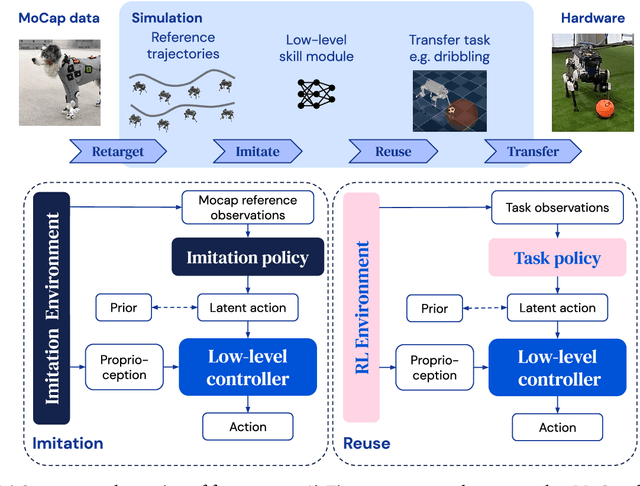
We investigate the use of prior knowledge of human and animal movement to learn reusable locomotion skills for real legged robots. Our approach builds upon previous work on imitating human or dog Motion Capture (MoCap) data to learn a movement skill module. Once learned, this skill module can be reused for complex downstream tasks. Importantly, due to the prior imposed by the MoCap data, our approach does not require extensive reward engineering to produce sensible and natural looking behavior at the time of reuse. This makes it easy to create well-regularized, task-oriented controllers that are suitable for deployment on real robots. We demonstrate how our skill module can be used for imitation, and train controllable walking and ball dribbling policies for both the ANYmal quadruped and OP3 humanoid. These policies are then deployed on hardware via zero-shot simulation-to-reality transfer. Accompanying videos are available at https://bit.ly/robot-npmp.