 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Keypoint Detection as Task Adaptation via Latent Embeddings
Paper and Code
Dec 13, 2021
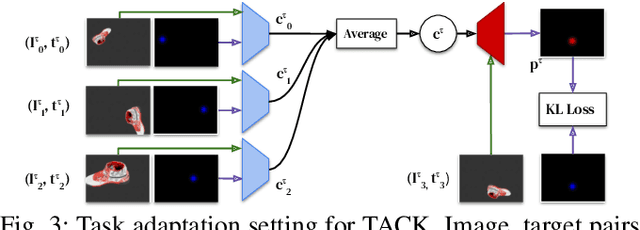
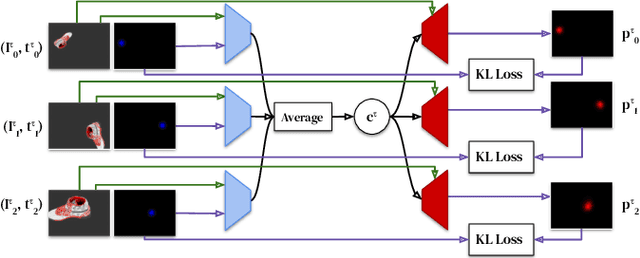
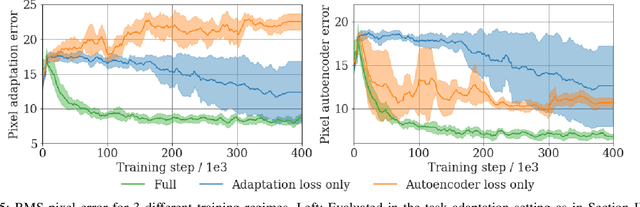
Dense object tracking, the ability to localize specific object points with pixel-level accuracy, is an important computer vision task with numerous downstream applications in robotics. Existing approaches either compute dense keypoint embeddings in a single forward pass, meaning the model is trained to track everything at once, or allocate their full capacity to a sparse predefined set of points, trading generality for accuracy. In this paper we explore a middle ground based on the observation that the number of relevant points at a given time are typically relatively few, e.g. grasp points on a target object. Our main contribution is a novel architecture, inspired by few-shot task adaptation, which allows a sparse-style network to condition on a keypoint embedding that indicates which point to track. Our central finding is that this approach provides the generality of dense-embedding models, while offering accuracy significantly closer to sparse-keypoint approaches. We present results illustrating this capacity vs. accuracy trade-off, and demonstrate the ability to zero-shot transfer to new object instances (within-class) using a real-robot pick-and-place task.