 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Q-Learning and Search with Amortized Value Estimates
Paper and Code
Jan 10, 2020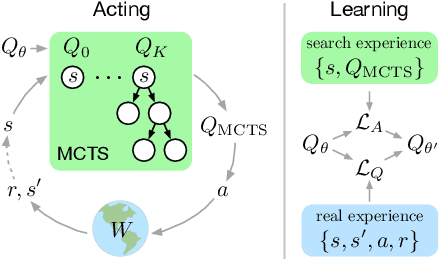
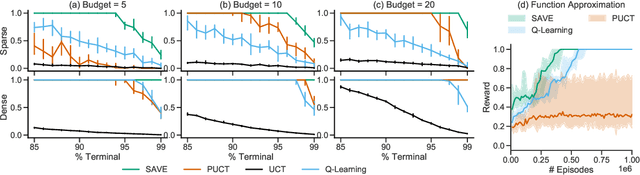
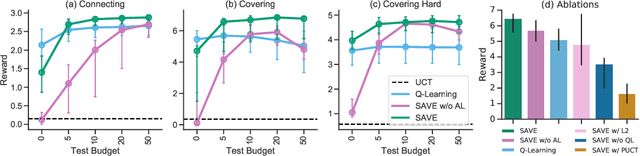
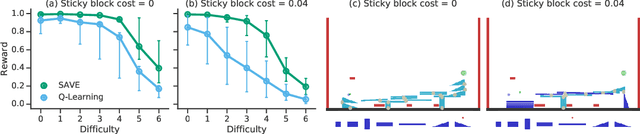
We introduce "Search with Amortized Value Estimates" (SAVE), an approach for combining model-free Q-learning with model-based Monte-Carlo Tree Search (MCTS). In SAVE, a learned prior over state-action values is used to guide MCTS, which estimates an improved set of state-action values. The new Q-estimates are then used in combination with real experience to update the prior. This effectively amortizes the value computation performed by MCTS, resulting in a cooperative relationship between model-free learning and model-based search. SAVE can be implemented on top of any Q-learning agent with access to a model, which we demonstrate by incorporating it into agents that perform challenging physical reasoning tasks and Atari. SAVE consistently achieves higher rewards with fewer training steps, and---in contrast to typical model-based search approaches---yields strong performance with very small search budgets. By combining real experience with information computed during search, SAVE demonstrates that it is possible to improve on both the performance of model-free learning and the computational cost of planning.