 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExoStart: Efficient learning for dexterous manipulation with sensorized exoskeleton demonstrations
Jun 13, 2025



Recent advancements in teleoperation systems have enabled high-quality data collection for robotic manipulators, showing impressive results in learning manipulation at scale. This progress suggests that extending these capabilities to robotic hands could unlock an even broader range of manipulation skills, especially if we could achieve the same level of dexterity that human hands exhibit. However, teleoperating robotic hands is far from a solved problem, as it presents a significant challenge due to the high degrees of freedom of robotic hands and the complex dynamics occurring during contact-rich settings. In this work, we present ExoStart, a general and scalable learning framework that leverages human dexterity to improve robotic hand control. In particular, we obtain high-quality data by collecting direct demonstrations without a robot in the loop using a sensorized low-cost wearable exoskeleton, capturing the rich behaviors that humans can demonstrate with their own hands. We also propose a simulation-based dynamics filter that generates dynamically feasible trajectories from the collected demonstrations and use the generated trajectories to bootstrap an auto-curriculum reinforcement learning method that relies only on simple sparse rewards. The ExoStart pipeline is generalizable and yields robust policies that transfer zero-shot to the real robot. Our results demonstrate that ExoStart can generate dexterous real-world hand skills, achieving a success rate above 50% on a wide range of complex tasks such as opening an AirPods case or inserting and turning a key in a lock. More details and videos can be found in https://sites.google.com/view/exostart.
RoboPianist: A Benchmark for High-Dimensional Robot Control
Apr 09, 2023



We introduce a new benchmarking suite for high-dimensional control, targeted at testing high spatial and temporal precision, coordination, and planning, all with an underactuated system frequently making-and-breaking contacts. The proposed challenge is mastering the piano through bi-manual dexterity, using a pair of simulated anthropomorphic robot hands. We call it RoboPianist, and the initial version covers a broad set of 150 variable-difficulty songs. We investigate both model-free and model-based methods on the benchmark, characterizing their performance envelopes. We observe that while certain existing methods, when well-tuned, can achieve impressive levels of performance in certain aspects, there is significant room for improvement. RoboPianist provides a rich quantitative benchmarking environment, with human-interpretable results, high ease of expansion by simply augmenting the repertoire with new songs, and opportunities for further research, including in multi-task learning, zero-shot generalization, multimodal (sound, vision, touch) learning, and imitation. Supplementary information, including videos of our control policies, can be found at https://kzakka.com/robopianist/
Predictive Sampling: Real-time Behaviour Synthesis with MuJoCo
Dec 01, 2022We introduce MuJoCo MPC (MJPC), an open-source, interactive application and software framework for real-time predictive control, based on MuJoCo physics. MJPC allows the user to easily author and solve complex robotics tasks, and currently supports three shooting-based planners: derivative-based iLQG and Gradient Descent, and a simple derivative-free method we call Predictive Sampling. Predictive Sampling was designed as an elementary baseline, mostly for its pedagogical value, but turned out to be surprisingly competitive with the more established algorithms. This work does not present algorithmic advances, and instead, prioritises performant algorithms, simple code, and accessibility of model-based methods via intuitive and interactive software. MJPC is available at: github.com/deepmind/mujoco_mpc, a video summary can be viewed at: dpmd.ai/mjpc.
Linear Contact-Implicit Model-Predictive Control
Jul 12, 2021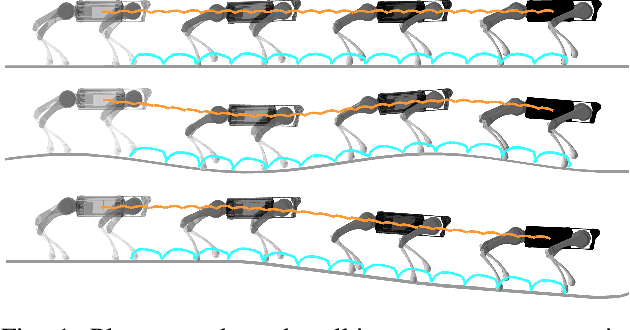
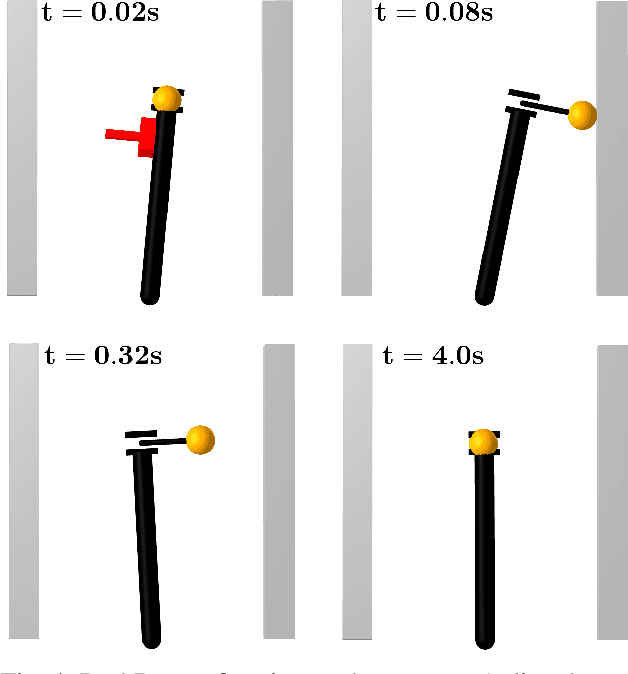
We present a general approach for controlling robotic systems that make and break contact with their environments: linear contact-implicit model-predictive control (LCI-MPC). Our use of differentiable contact dynamics provides a natural extension of linear model-predictive control to contact-rich settings. The policy leverages precomputed linearizations about a reference state or trajectory while contact modes, encoded via complementarity constraints, are explicitly retained, resulting in policies that can be efficiently evaluated while maintaining robustness to changes in contact timings. In many cases, the algorithm is even capable of generating entirely new contact sequences. To enable real-time performance, we devise a custom structure-exploiting linear solver for the contact dynamics. We demonstrate that the policy can respond to disturbances by discovering and exploiting new contact modes and is robust to model mismatch and unmodeled environments for a collection of simulated robotic systems, including: pushbot, hopper, quadruped, and biped.