 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMURAL: Meta-Learning Uncertainty-Aware Rewards for Outcome-Driven Reinforcement Learning
Jul 18, 2021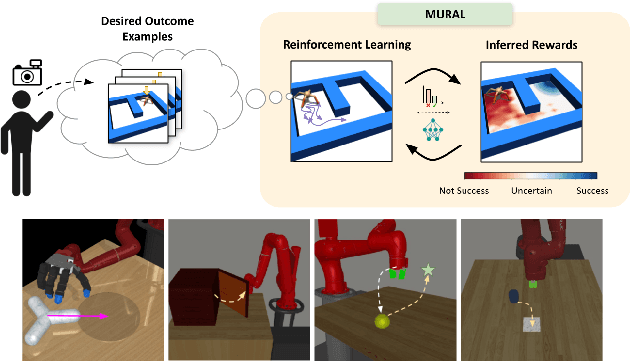
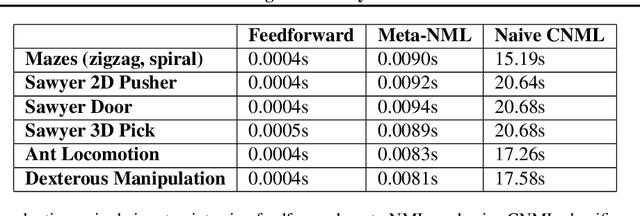

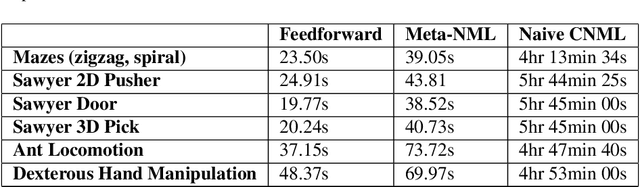
Exploration in reinforcement learning is a challenging problem: in the worst case, the agent must search for high-reward states that could be hidden anywhere in the state space. Can we define a more tractable class of RL problems, where the agent is provided with examples of successful outcomes? In this problem setting, the reward function can be obtained automatically by training a classifier to categorize states as successful or not. If trained properly, such a classifier can provide a well-shaped objective landscape that both promotes progress toward good states and provides a calibrated exploration bonus. In this work, we show that an uncertainty aware classifier can solve challenging reinforcement learning problems by both encouraging exploration and provided directed guidance towards positive outcomes. We propose a novel mechanism for obtaining these calibrated, uncertainty-aware classifiers based on an amortized technique for computing the normalized maximum likelihood (NML) distribution. To make this tractable, we propose a novel method for computing the NML distribution by using meta-learning. We show that the resulting algorithm has a number of intriguing connections to both count-based exploration methods and prior algorithms for learning reward functions, while also providing more effective guidance towards the goal. We demonstrate that our algorithm solves a number of challenging navigation and robotic manipulation tasks which prove difficult or impossible for prior methods.
Learning To Reach Goals Without Reinforcement Learning
Dec 13, 2019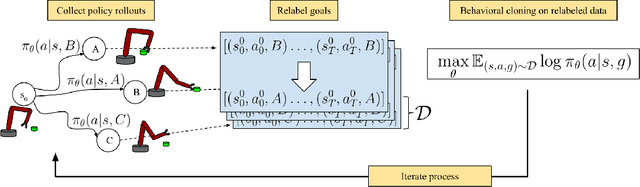
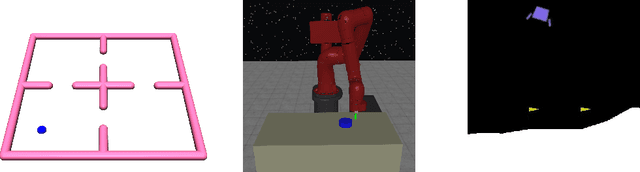
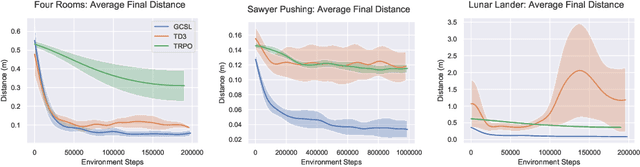
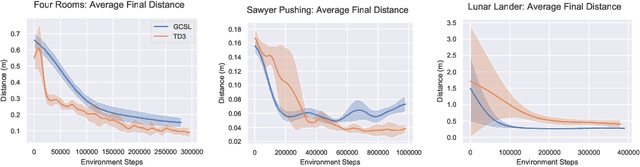
Imitation learning algorithms provide a simple and straightforward approach for training control policies via supervised learning. By maximizing the likelihood of good actions provided by an expert demonstrator, supervised imitation learning can produce effective policies without the algorithmic complexities and optimization challenges of reinforcement learning, at the cost of requiring an expert demonstrator to provide the demonstrations. In this paper, we ask: can we take insights from imitation learning to design algorithms that can effectively acquire optimal policies from scratch without any expert demonstrations? The key observation that makes this possible is that, in the multi-task setting, trajectories that are generated by a suboptimal policy can still serve as optimal examples for other tasks. In particular, when tasks correspond to different goals, every trajectory is a successful demonstration for the goal state that it actually reaches. We propose a simple algorithm for learning goal-reaching behaviors without any demonstrations, complicated user-provided reward functions, or complex reinforcement learning methods. Our method simply maximizes the likelihood of actions the agent actually took in its own previous rollouts, conditioned on the goal being the state that it actually reached. Although related variants of this approach have been proposed previously in imitation learning with demonstrations, we show how this approach can effectively learn goal-reaching policies from scratch. We present a theoretical result linking self-supervised imitation learning and reinforcement learning, and empirical results showing that it performs competitively with more complex reinforcement learning methods on a range of challenging goal reaching problems, while yielding advantages in terms of stability and use of offline data.