 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Tensor Programs V: Tuning Large Neural Networks via Zero-Shot Hyperparameter Transfer
Mar 28, 2022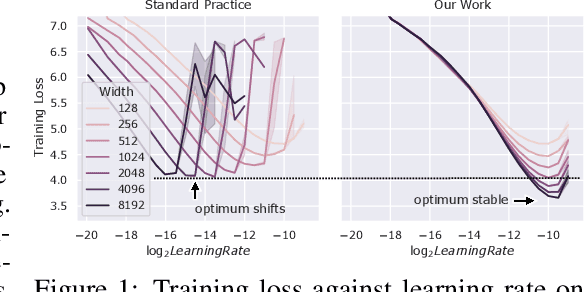

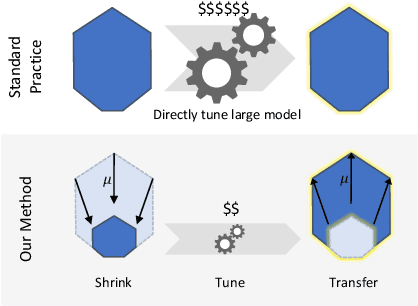

Hyperparameter (HP) tuning in deep learning is an expensive process, prohibitively so for neural networks (NNs) with billions of parameters. We show that, in the recently discovered Maximal Update Parametrization (muP), many optimal HPs remain stable even as model size changes. This leads to a new HP tuning paradigm we call muTransfer: parametrize the target model in muP, tune the HP indirectly on a smaller model, and zero-shot transfer them to the full-sized model, i.e., without directly tuning the latter at all. We verify muTransfer on Transformer and ResNet. For example, 1) by transferring pretraining HPs from a model of 13M parameters, we outperform published numbers of BERT-large (350M parameters), with a total tuning cost equivalent to pretraining BERT-large once; 2) by transferring from 40M parameters, we outperform published numbers of the 6.7B GPT-3 model, with tuning cost only 7% of total pretraining cost. A Pytorch implementation of our technique can be found at github.com/microsoft/mup and installable via `pip install mup`.
Dota 2 with Large Scale Deep Reinforcement Learning
Dec 13, 2019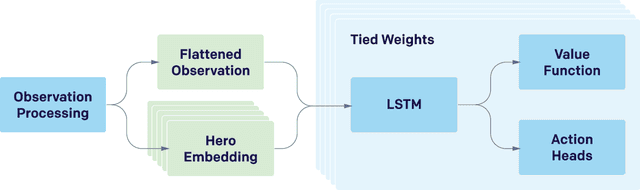
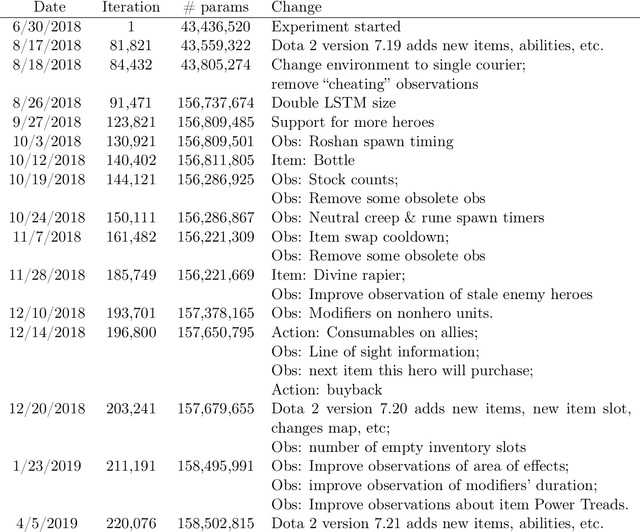
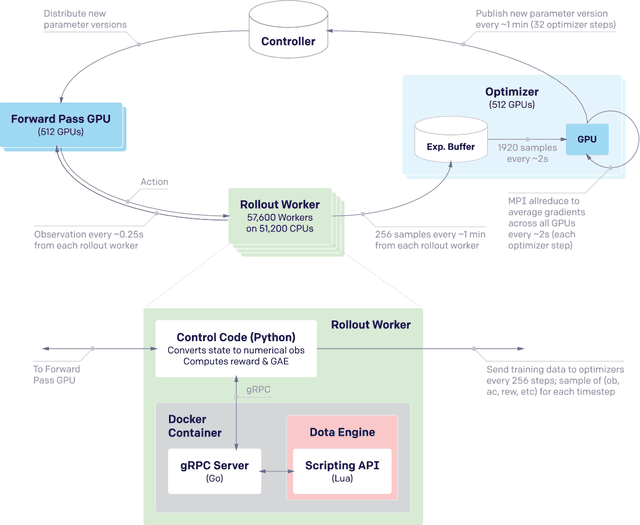
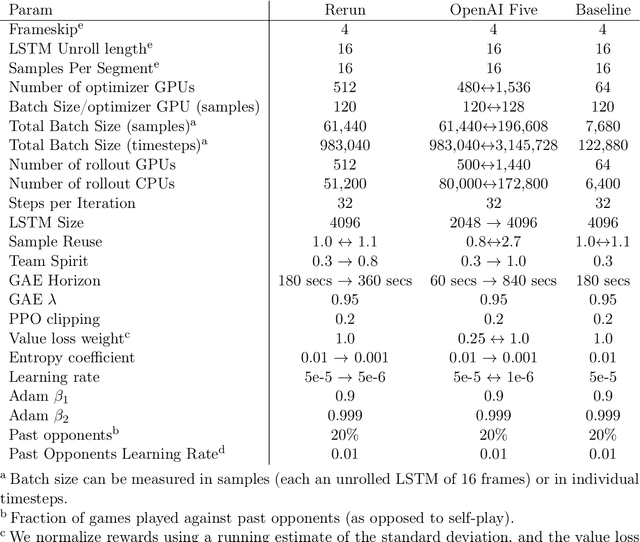
On April 13th, 2019, OpenAI Five became the first AI system to defeat the world champions at an esports game. The game of Dota 2 presents novel challenges for AI systems such as long time horizons, imperfect information, and complex, continuous state-action spaces, all challenges which will become increasingly central to more capable AI systems. OpenAI Five leveraged existing reinforcement learning techniques, scaled to learn from batches of approximately 2 million frames every 2 seconds. We developed a distributed training system and tools for continual training which allowed us to train OpenAI Five for 10 months. By defeating the Dota 2 world champion (Team OG), OpenAI Five demonstrates that self-play reinforcement learning can achieve superhuman performance on a difficult task.
Learning Dexterous In-Hand Manipulation
Jan 18, 2019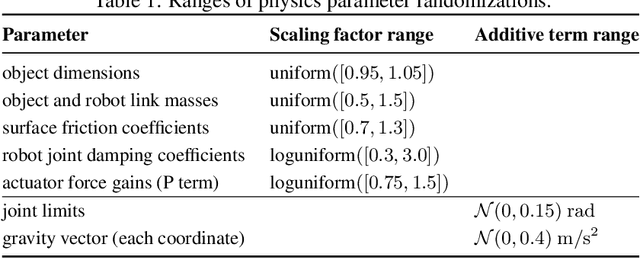
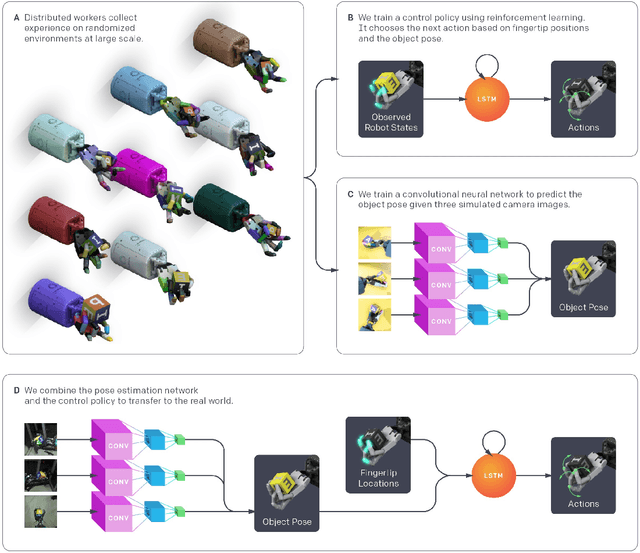
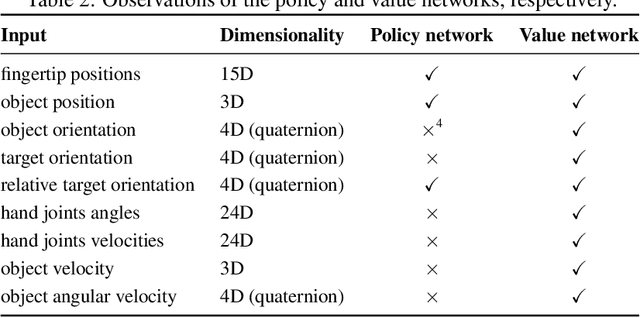
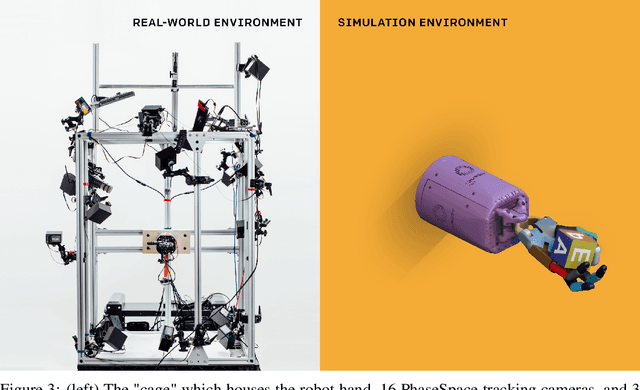
We use reinforcement learning (RL) to learn dexterous in-hand manipulation policies which can perform vision-based object reorientation on a physical Shadow Dexterous Hand. The training is performed in a simulated environment in which we randomize many of the physical properties of the system like friction coefficients and an object's appearance. Our policies transfer to the physical robot despite being trained entirely in simulation. Our method does not rely on any human demonstrations, but many behaviors found in human manipulation emerge naturally, including finger gaiting, multi-finger coordination, and the controlled use of gravity. Our results were obtained using the same distributed RL system that was used to train OpenAI Five. We also include a video of our results: https://youtu.be/jwSbzNHGflM
Emergent Complexity via Multi-Agent Competition
Mar 14, 2018

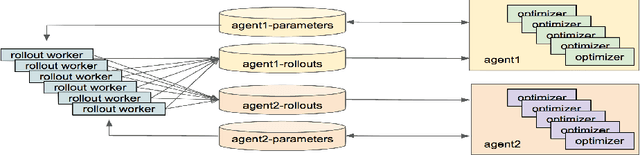
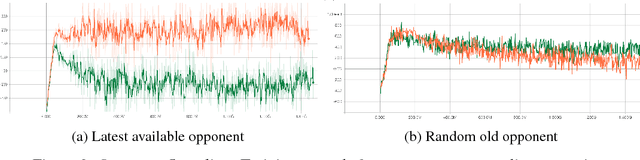
Reinforcement learning algorithms can train agents that solve problems in complex, interesting environments. Normally, the complexity of the trained agent is closely related to the complexity of the environment. This suggests that a highly capable agent requires a complex environment for training. In this paper, we point out that a competitive multi-agent environment trained with self-play can produce behaviors that are far more complex than the environment itself. We also point out that such environments come with a natural curriculum, because for any skill level, an environment full of agents of this level will have the right level of difficulty. This work introduces several competitive multi-agent environments where agents compete in a 3D world with simulated physics. The trained agents learn a wide variety of complex and interesting skills, even though the environment themselves are relatively simple. The skills include behaviors such as running, blocking, ducking, tackling, fooling opponents, kicking, and defending using both arms and legs. A highlight of the learned behaviors can be found here: https://goo.gl/eR7fbX
Parameter Space Noise for Exploration
Jan 31, 2018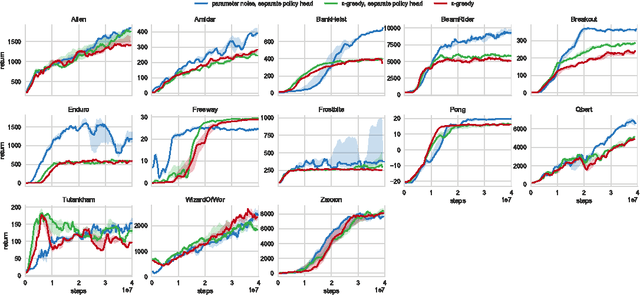
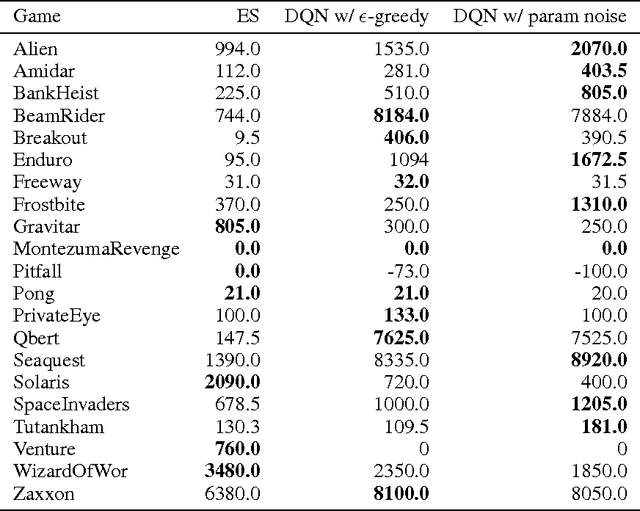
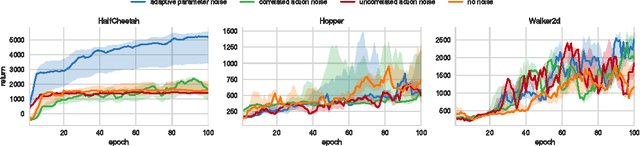
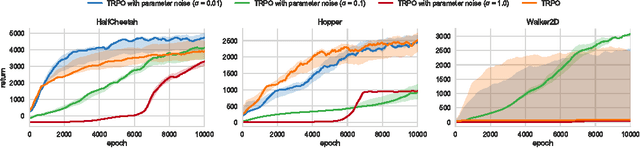
Deep reinforcement learning (RL) methods generally engage in exploratory behavior through noise injection in the action space. An alternative is to add noise directly to the agent's parameters, which can lead to more consistent exploration and a richer set of behaviors. Methods such as evolutionary strategies use parameter perturbations, but discard all temporal structure in the process and require significantly more samples. Combining parameter noise with traditional RL methods allows to combine the best of both worlds. We demonstrate that both off- and on-policy methods benefit from this approach through experimental comparison of DQN, DDPG, and TRPO on high-dimensional discrete action environments as well as continuous control tasks. Our results show that RL with parameter noise learns more efficiently than traditional RL with action space noise and evolutionary strategies individually.
UCB Exploration via Q-Ensembles
Nov 07, 2017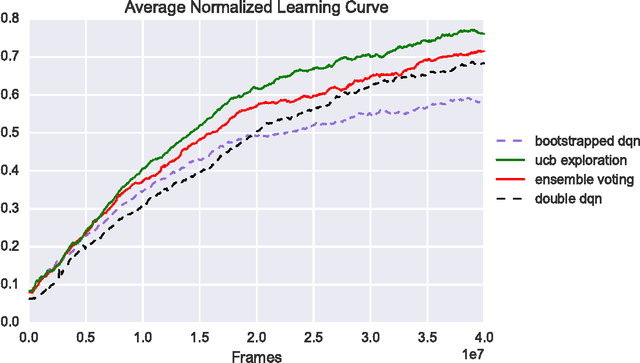
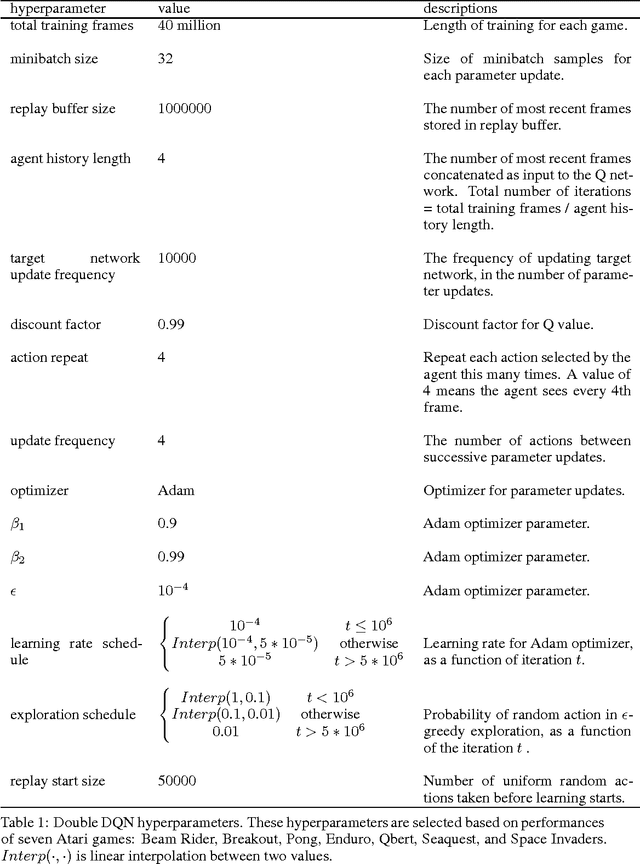
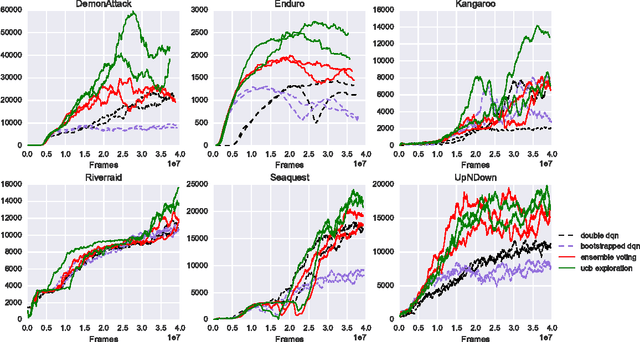
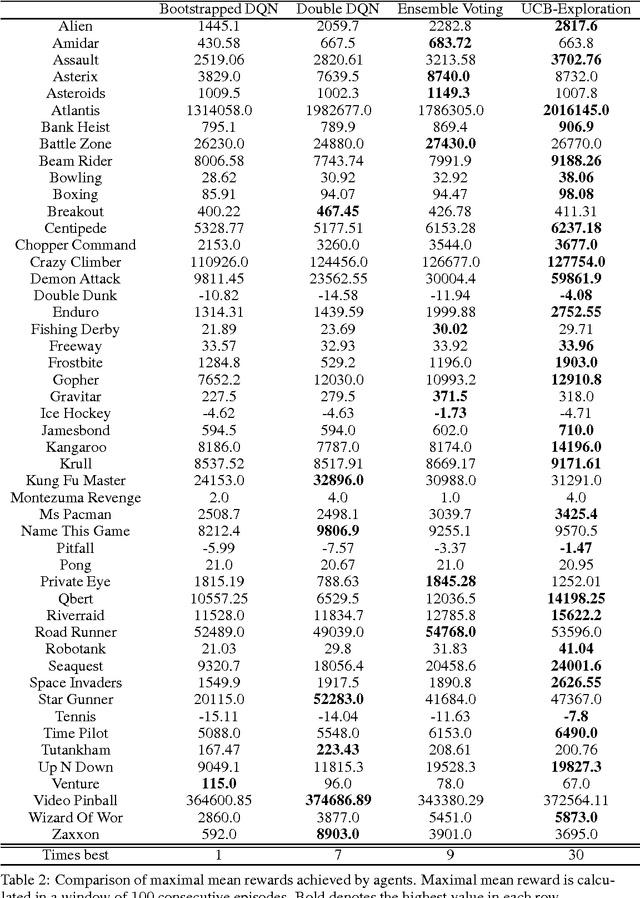
We show how an ensemble of $Q^*$-functions can be leveraged for more effective exploration in deep reinforcement learning. We build on well established algorithms from the bandit setting, and adapt them to the $Q$-learning setting. We propose an exploration strategy based on upper-confidence bounds (UCB). Our experiments show significant gains on the Atari benchmark.
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
Sep 07, 2017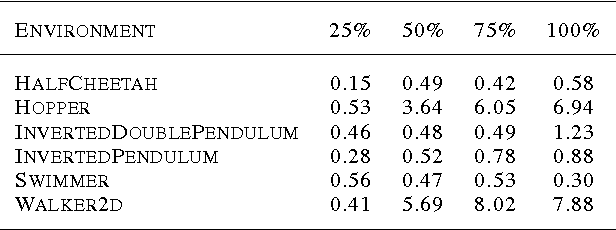
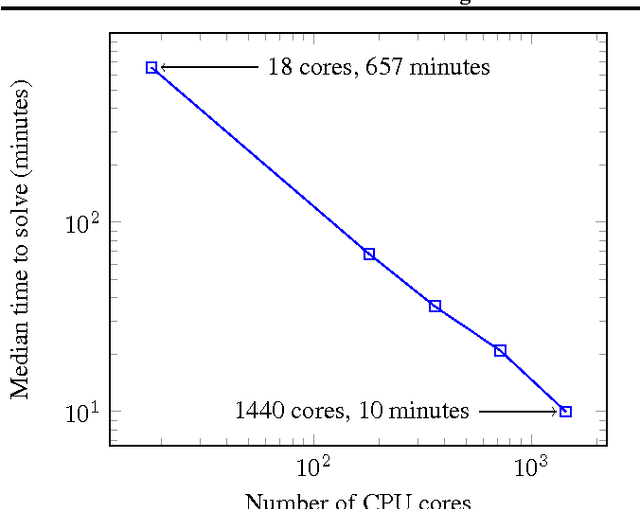
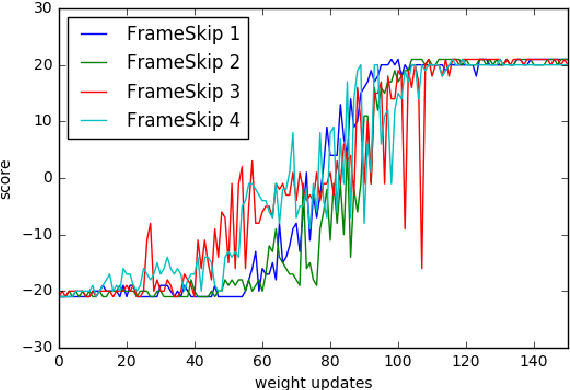
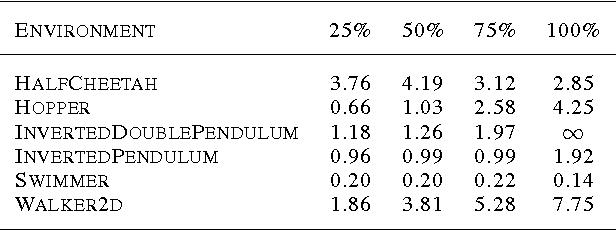
We explore the use of Evolution Strategies (ES), a class of black box optimization algorithms, as an alternative to popular MDP-based RL techniques such as Q-learning and Policy Gradients. Experiments on MuJoCo and Atari show that ES is a viable solution strategy that scales extremely well with the number of CPUs available: By using a novel communication strategy based on common random numbers, our ES implementation only needs to communicate scalars, making it possible to scale to over a thousand parallel workers. This allows us to solve 3D humanoid walking in 10 minutes and obtain competitive results on most Atari games after one hour of training. In addition, we highlight several advantages of ES as a black box optimization technique: it is invariant to action frequency and delayed rewards, tolerant of extremely long horizons, and does not need temporal discounting or value function approximation.
Schema Networks: Zero-shot Transfer with a Generative Causal Model of Intuitive Physics
Aug 17, 2017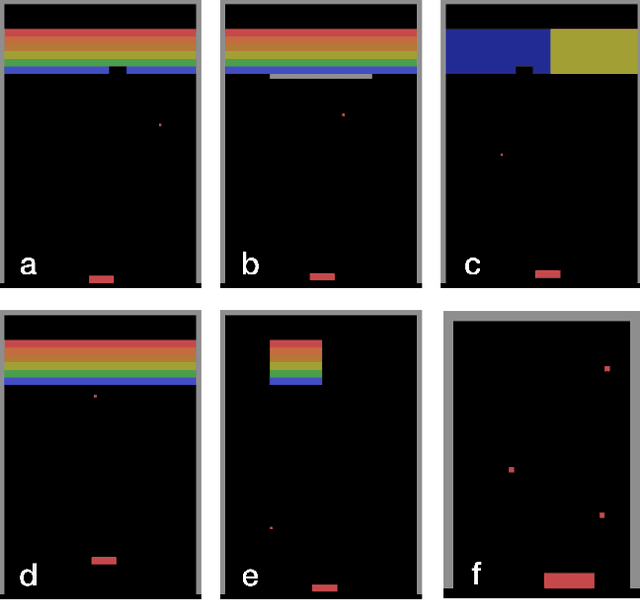

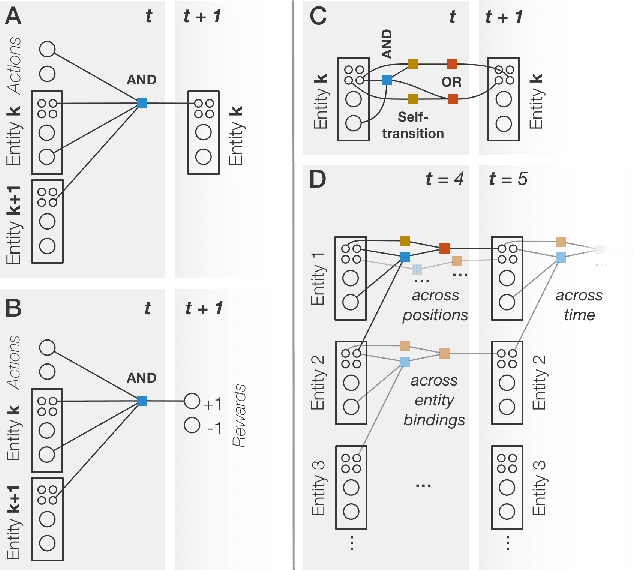
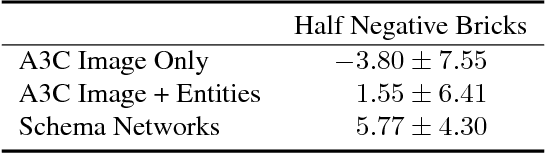
The recent adaptation of deep neural network-based methods to reinforcement learning and planning domains has yielded remarkable progress on individual tasks. Nonetheless, progress on task-to-task transfer remains limited. In pursuit of efficient and robust generalization, we introduce the Schema Network, an object-oriented generative physics simulator capable of disentangling multiple causes of events and reasoning backward through causes to achieve goals. The richly structured architecture of the Schema Network can learn the dynamics of an environment directly from data. We compare Schema Networks with Asynchronous Advantage Actor-Critic and Progressive Networks on a suite of Breakout variations, reporting results on training efficiency and zero-shot generalization, consistently demonstrating faster, more robust learning and better transfer. We argue that generalizing from limited data and learning causal relationships are essential abilities on the path toward generally intelligent systems.
Time Resource Networks
Feb 09, 2016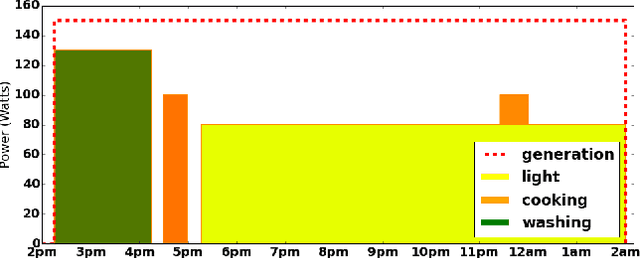
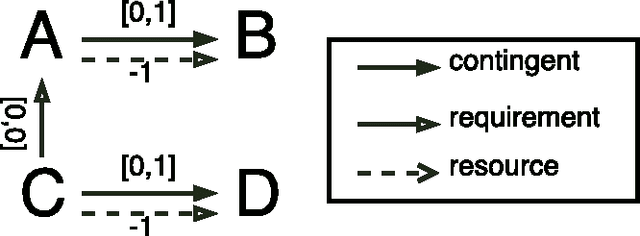
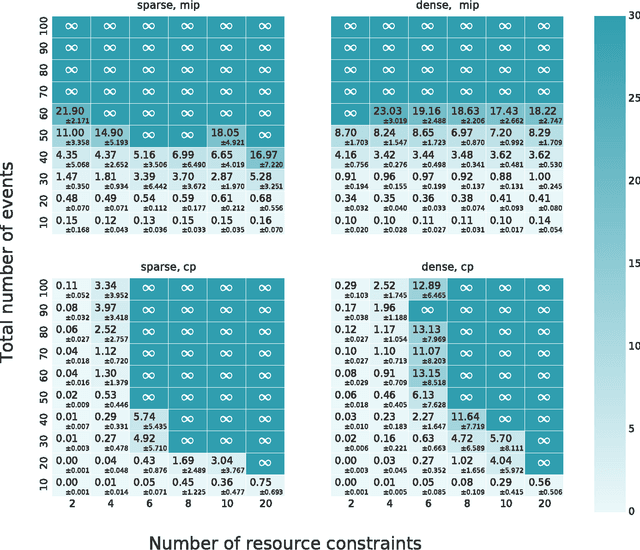
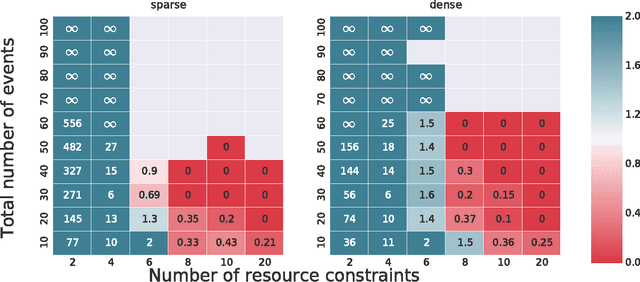
The problem of scheduling under resource constraints is widely applicable. One prominent example is power management, in which we have a limited continuous supply of power but must schedule a number of power-consuming tasks. Such problems feature tightly coupled continuous resource constraints and continuous temporal constraints. We address such problems by introducing the Time Resource Network (TRN), an encoding for resource-constrained scheduling problems. The definition allows temporal specifications using a general family of representations derived from the Simple Temporal network, including the Simple Temporal Network with Uncertainty, and the probabilistic Simple Temporal Network (Fang et al. (2014)). We propose two algorithms for determining the consistency of a TRN: one based on Mixed Integer Programing and the other one based on Constraint Programming, which we evaluate on scheduling problems with Simple Temporal Constraints and Probabilistic Temporal Constraints.