 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Model Predictive Control
Oct 07, 2024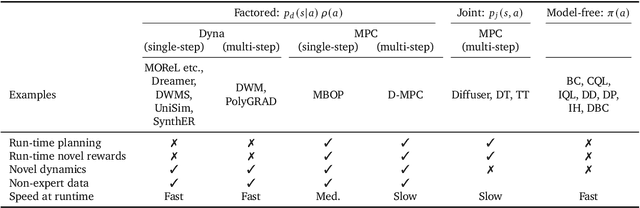
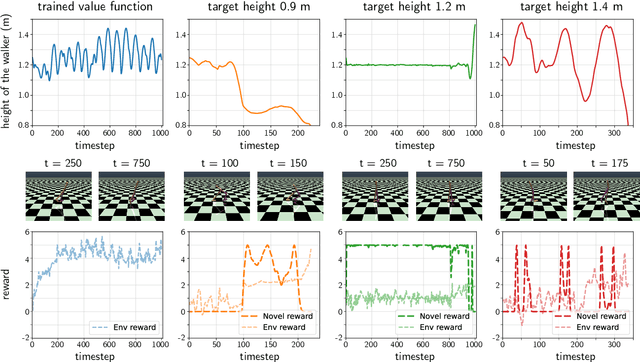
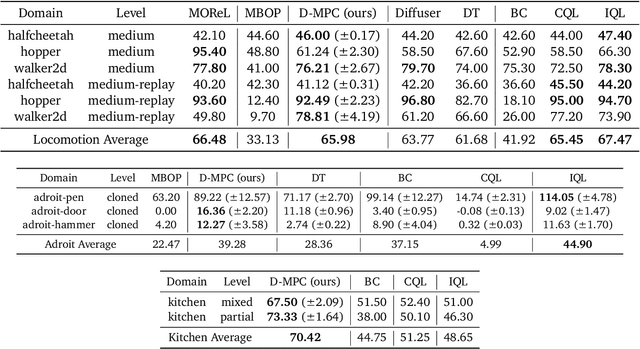
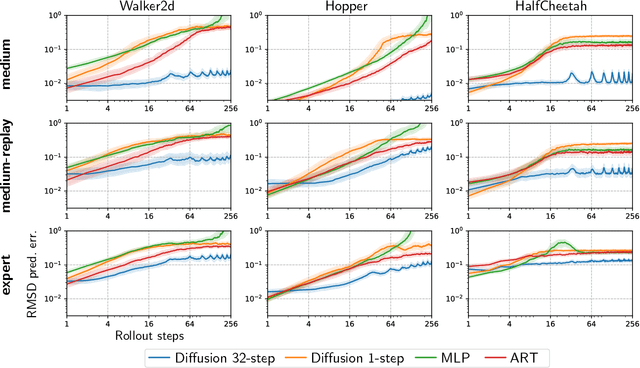
We propose Diffusion Model Predictive Control (D-MPC), a novel MPC approach that learns a multi-step action proposal and a multi-step dynamics model, both using diffusion models, and combines them for use in online MPC. On the popular D4RL benchmark, we show performance that is significantly better than existing model-based offline planning methods using MPC and competitive with state-of-the-art (SOTA) model-based and model-free reinforcement learning methods. We additionally illustrate D-MPC's ability to optimize novel reward functions at run time and adapt to novel dynamics, and highlight its advantages compared to existing diffusion-based planning baselines.
DMC-VB: A Benchmark for Representation Learning for Control with Visual Distractors
Sep 26, 2024



Learning from previously collected data via behavioral cloning or offline reinforcement learning (RL) is a powerful recipe for scaling generalist agents by avoiding the need for expensive online learning. Despite strong generalization in some respects, agents are often remarkably brittle to minor visual variations in control-irrelevant factors such as the background or camera viewpoint. In this paper, we present theDeepMind Control Visual Benchmark (DMC-VB), a dataset collected in the DeepMind Control Suite to evaluate the robustness of offline RL agents for solving continuous control tasks from visual input in the presence of visual distractors. In contrast to prior works, our dataset (a) combines locomotion and navigation tasks of varying difficulties, (b) includes static and dynamic visual variations, (c) considers data generated by policies with different skill levels, (d) systematically returns pairs of state and pixel observation, (e) is an order of magnitude larger, and (f) includes tasks with hidden goals. Accompanying our dataset, we propose three benchmarks to evaluate representation learning methods for pretraining, and carry out experiments on several recently proposed methods. First, we find that pretrained representations do not help policy learning on DMC-VB, and we highlight a large representation gap between policies learned on pixel observations and on states. Second, we demonstrate when expert data is limited, policy learning can benefit from representations pretrained on (a) suboptimal data, and (b) tasks with stochastic hidden goals. Our dataset and benchmark code to train and evaluate agents are available at: https://github.com/google-deepmind/dmc_vision_benchmark.
What type of inference is planning?
Jun 25, 2024



Multiple types of inference are available for probabilistic graphical models, e.g., marginal, maximum-a-posteriori, and even marginal maximum-a-posteriori. Which one do researchers mean when they talk about "planning as inference"? There is no consistency in the literature, different types are used, and their ability to do planning is further entangled with specific approximations or additional constraints. In this work we use the variational framework to show that all commonly used types of inference correspond to different weightings of the entropy terms in the variational problem, and that planning corresponds _exactly_ to a _different_ set of weights. This means that all the tricks of variational inference are readily applicable to planning. We develop an analogue of loopy belief propagation that allows us to perform approximate planning in factored state Markov decisions processes without incurring intractability due to the exponentially large state space. The variational perspective shows that the previous types of inference for planning are only adequate in environments with low stochasticity, and allows us to characterize each type by its own merits, disentangling the type of inference from the additional approximations that its practical use requires. We validate these results empirically on synthetic MDPs and tasks posed in the International Planning Competition.
Learning Cognitive Maps from Transformer Representations for Efficient Planning in Partially Observed Environments
Jan 11, 2024Despite their stellar performance on a wide range of tasks, including in-context tasks only revealed during inference, vanilla transformers and variants trained for next-token predictions (a) do not learn an explicit world model of their environment which can be flexibly queried and (b) cannot be used for planning or navigation. In this paper, we consider partially observed environments (POEs), where an agent receives perceptually aliased observations as it navigates, which makes path planning hard. We introduce a transformer with (multiple) discrete bottleneck(s), TDB, whose latent codes learn a compressed representation of the history of observations and actions. After training a TDB to predict the future observation(s) given the history, we extract interpretable cognitive maps of the environment from its active bottleneck(s) indices. These maps are then paired with an external solver to solve (constrained) path planning problems. First, we show that a TDB trained on POEs (a) retains the near perfect predictive performance of a vanilla transformer or an LSTM while (b) solving shortest path problems exponentially faster. Second, a TDB extracts interpretable representations from text datasets, while reaching higher in-context accuracy than vanilla sequence models. Finally, in new POEs, a TDB (a) reaches near-perfect in-context accuracy, (b) learns accurate in-context cognitive maps (c) solves in-context path planning problems.
Graph schemas as abstractions for transfer learning, inference, and planning
Feb 14, 2023We propose schemas as a model for abstractions that can be used for rapid transfer learning, inference, and planning. Common structured representations of concepts and behaviors -- schemas -- have been proposed as a powerful way to encode abstractions. Latent graph learning is emerging as a new computational model of the hippocampus to explain map learning and transitive inference. We build on this work to show that learned latent graphs in these models have a slot structure -- schemas -- that allow for quick knowledge transfer across environments. In a new environment, an agent can rapidly learn new bindings between the sensory stream to multiple latent schemas and select the best fitting one to guide behavior. To evaluate these graph schemas, we use two previously published challenging tasks: the memory & planning game and one-shot StreetLearn, that are designed to test rapid task solving in novel environments. Graph schemas can be learned in far fewer episodes than previous baselines, and can model and plan in a few steps in novel variations of these tasks. We further demonstrate learning, matching, and reusing graph schemas in navigation tasks in more challenging environments with aliased observations and size variations, and show how different schemas can be composed to model larger 2D and 3D environments.
3D Neural Embedding Likelihood for Robust Sim-to-Real Transfer in Inverse Graphics
Feb 07, 2023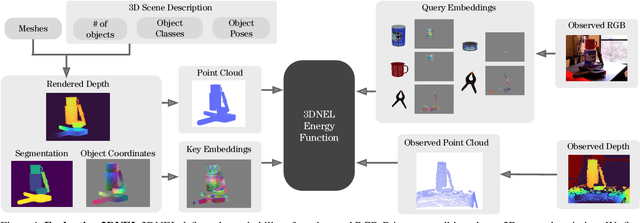
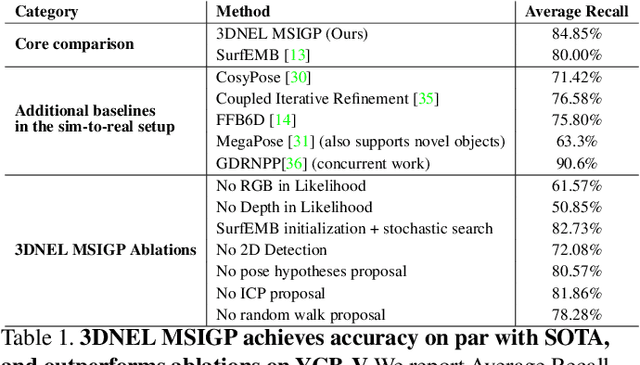
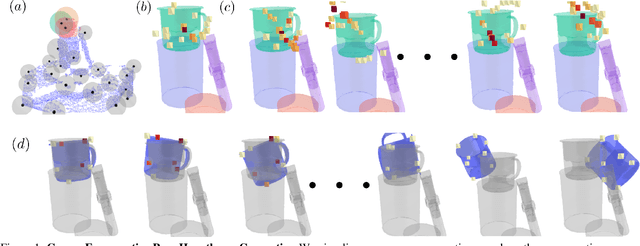
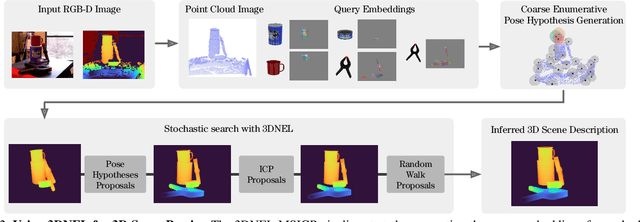
A central challenge in 3D scene perception via inverse graphics is robustly modeling the gap between 3D graphics and real-world data. We propose a novel 3D Neural Embedding Likelihood (3DNEL) over RGB-D images to address this gap. 3DNEL uses neural embeddings to predict 2D-3D correspondences from RGB and combines this with depth in a principled manner. 3DNEL is trained entirely from synthetic images and generalizes to real-world data. To showcase this capability, we develop a multi-stage inverse graphics pipeline that uses 3DNEL for 6D object pose estimation from real RGB-D images. Our method outperforms the previous state-of-the-art in sim-to-real pose estimation on the YCB-Video dataset, and improves robustness, with significantly fewer large-error predictions. Unlike existing bottom-up, discriminative approaches that are specialized for pose estimation, 3DNEL adopts a probabilistic generative formulation that jointly models multi-object scenes. This generative formulation enables easy extension of 3DNEL to additional tasks like object and camera tracking from video, using principled inference in the same probabilistic model without task specific retraining.
PGMax: Factor Graphs for Discrete Probabilistic Graphical Models and Loopy Belief Propagation in JAX
Feb 08, 2022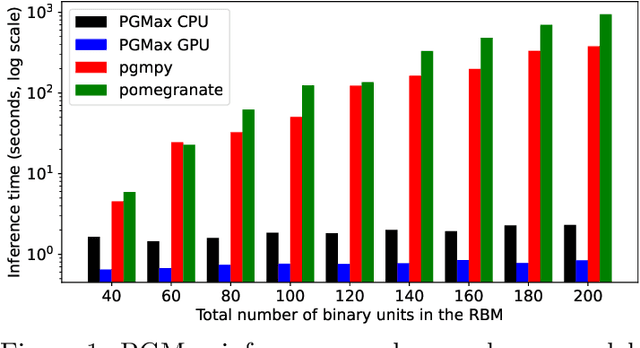
PGMax is an open-source Python package for easy specification of discrete Probabilistic Graphical Models (PGMs) as factor graphs, and automatic derivation of efficient and scalable loopy belief propagation (LBP) implementation in JAX. It supports general factor graphs, and can effectively leverage modern accelerators like GPUs for inference. Compared with existing alternatives, PGMax obtains higher-quality inference results with orders-of-magnitude inference speedups. PGMax additionally interacts seamlessly with the rapidly growing JAX ecosystem, opening up exciting new possibilities. Our source code, examples and documentation are available at https://github.com/vicariousinc/PGMax.
DURableVS: Data-efficient Unsupervised Recalibrating Visual Servoing via online learning in a structured generative model
Feb 08, 2022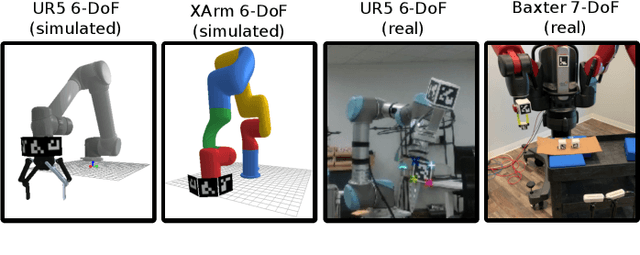
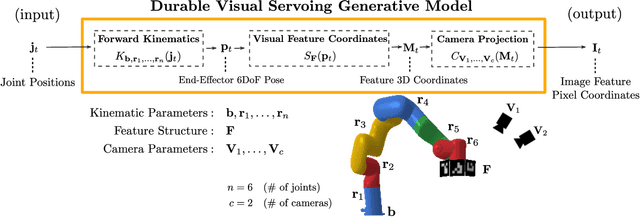
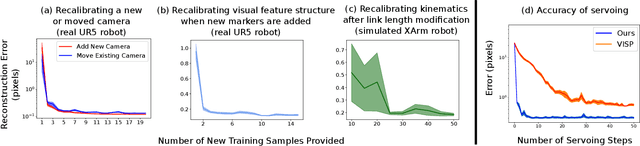
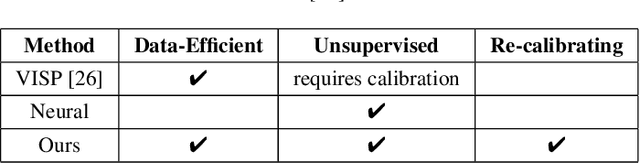
Visual servoing enables robotic systems to perform accurate closed-loop control, which is required in many applications. However, existing methods either require precise calibration of the robot kinematic model and cameras or use neural architectures that require large amounts of data to train. In this work, we present a method for unsupervised learning of visual servoing that does not require any prior calibration and is extremely data-efficient. Our key insight is that visual servoing does not depend on identifying the veridical kinematic and camera parameters, but instead only on an accurate generative model of image feature observations from the joint positions of the robot. We demonstrate that with our model architecture and learning algorithm, we can consistently learn accurate models from less than 50 training samples (which amounts to less than 1 min of unsupervised data collection), and that such data-efficient learning is not possible with standard neural architectures. Further, we show that by using the generative model in the loop and learning online, we can enable a robotic system to recover from calibration errors and to detect and quickly adapt to possibly unexpected changes in the robot-camera system (e.g. bumped camera, new objects).
Graphical Models with Attention for Context-Specific Independence and an Application to Perceptual Grouping
Dec 06, 2021
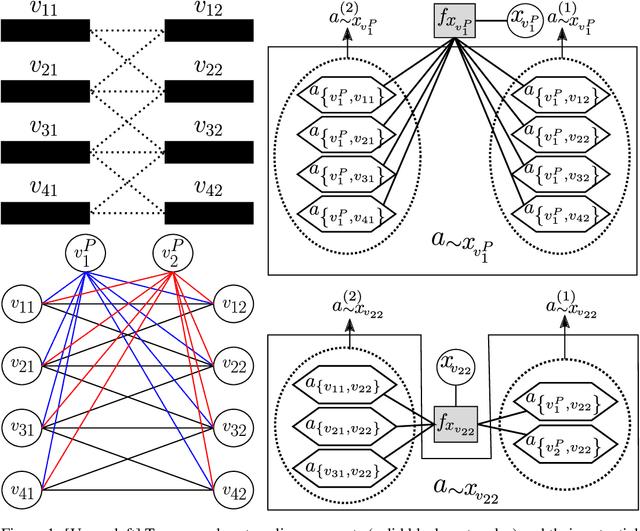

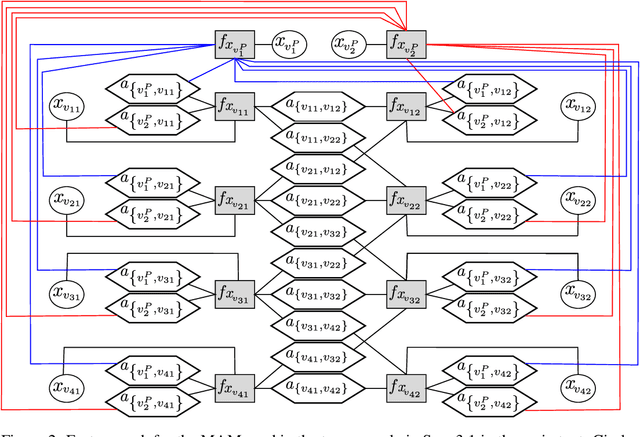
Discrete undirected graphical models, also known as Markov Random Fields (MRFs), can flexibly encode probabilistic interactions of multiple variables, and have enjoyed successful applications to a wide range of problems. However, a well-known yet little studied limitation of discrete MRFs is that they cannot capture context-specific independence (CSI). Existing methods require carefully developed theories and purpose-built inference methods, which limit their applications to only small-scale problems. In this paper, we propose the Markov Attention Model (MAM), a family of discrete MRFs that incorporates an attention mechanism. The attention mechanism allows variables to dynamically attend to some other variables while ignoring the rest, and enables capturing of CSIs in MRFs. A MAM is formulated as an MRF, allowing it to benefit from the rich set of existing MRF inference methods and scale to large models and datasets. To demonstrate MAM's capabilities to capture CSIs at scale, we apply MAMs to capture an important type of CSI that is present in a symbolic approach to recurrent computations in perceptual grouping. Experiments on two recently proposed synthetic perceptual grouping tasks and on realistic images demonstrate the advantages of MAMs in sample-efficiency, interpretability and generalizability when compared with strong recurrent neural network baselines, and validate MAM's capabilities to efficiently capture CSIs at scale.
Sample-efficient L0-L2 constrained structure learning of sparse Ising models
Dec 04, 2020


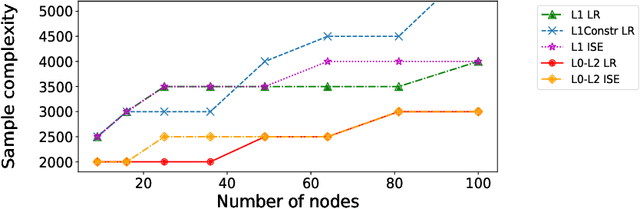
We consider the problem of learning the underlying graph of a sparse Ising model with $p$ nodes from $n$ i.i.d. samples. The most recent and best performing approaches combine an empirical loss (the logistic regression loss or the interaction screening loss) with a regularizer (an L1 penalty or an L1 constraint). This results in a convex problem that can be solved separately for each node of the graph. In this work, we leverage the cardinality constraint L0 norm, which is known to properly induce sparsity, and further combine it with an L2 norm to better model the non-zero coefficients. We show that our proposed estimators achieve an improved sample complexity, both (a) theoretically -- by reaching new state-of-the-art upper bounds for recovery guarantees -- and (b) empirically -- by showing sharper phase transitions between poor and full recovery for graph topologies studied in the literature -- when compared to their L1-based counterparts.