Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Model Predictive Control
Paper and Code
Oct 07, 2024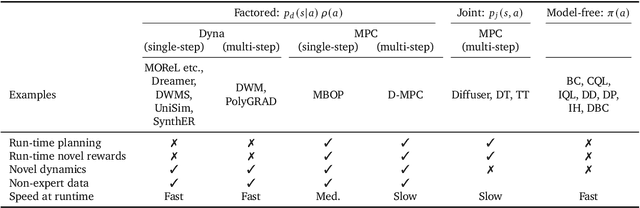
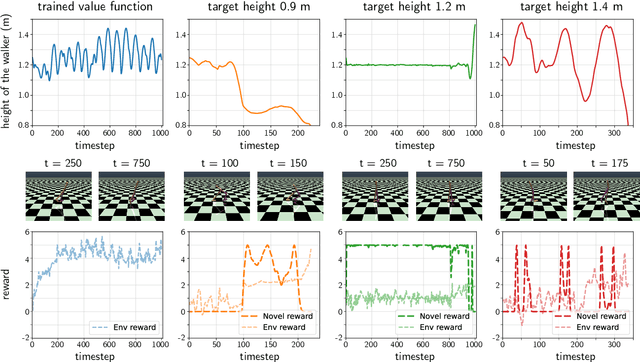
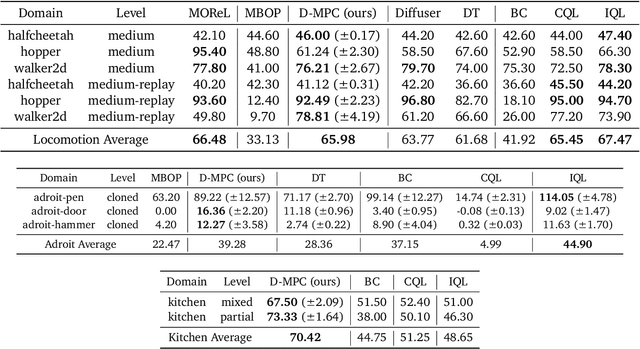
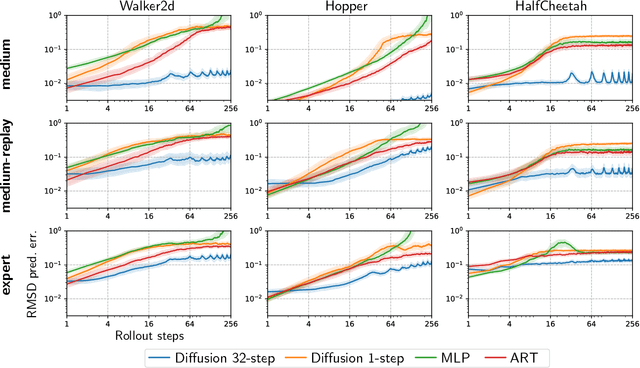
We propose Diffusion Model Predictive Control (D-MPC), a novel MPC approach that learns a multi-step action proposal and a multi-step dynamics model, both using diffusion models, and combines them for use in online MPC. On the popular D4RL benchmark, we show performance that is significantly better than existing model-based offline planning methods using MPC and competitive with state-of-the-art (SOTA) model-based and model-free reinforcement learning methods. We additionally illustrate D-MPC's ability to optimize novel reward functions at run time and adapt to novel dynamics, and highlight its advantages compared to existing diffusion-based planning baselines.
* Preprint
View paper on