 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributional Diffusion Models with Scoring Rules
Feb 04, 2025Diffusion models generate high-quality synthetic data. They operate by defining a continuous-time forward process which gradually adds Gaussian noise to data until fully corrupted. The corresponding reverse process progressively "denoises" a Gaussian sample into a sample from the data distribution. However, generating high-quality outputs requires many discretization steps to obtain a faithful approximation of the reverse process. This is expensive and has motivated the development of many acceleration methods. We propose to accomplish sample generation by learning the posterior {\em distribution} of clean data samples given their noisy versions, instead of only the mean of this distribution. This allows us to sample from the probability transitions of the reverse process on a coarse time scale, significantly accelerating inference with minimal degradation of the quality of the output. This is accomplished by replacing the standard regression loss used to estimate conditional means with a scoring rule. We validate our method on image and robot trajectory generation, where we consistently outperform standard diffusion models at few discretization steps.
Diffusion Model Predictive Control
Oct 07, 2024
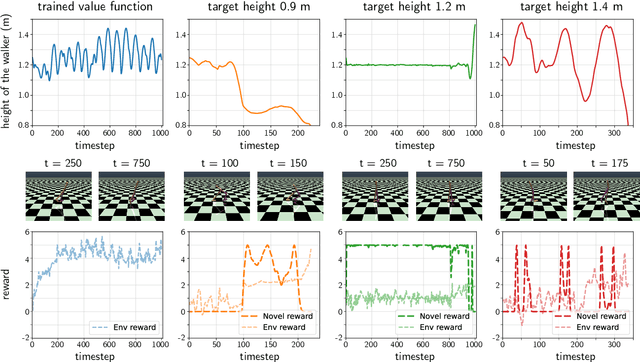
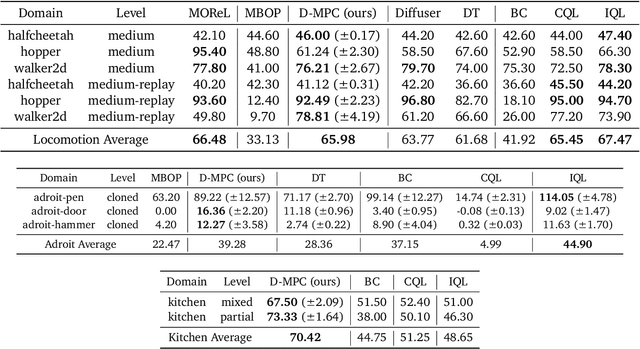
We propose Diffusion Model Predictive Control (D-MPC), a novel MPC approach that learns a multi-step action proposal and a multi-step dynamics model, both using diffusion models, and combines them for use in online MPC. On the popular D4RL benchmark, we show performance that is significantly better than existing model-based offline planning methods using MPC and competitive with state-of-the-art (SOTA) model-based and model-free reinforcement learning methods. We additionally illustrate D-MPC's ability to optimize novel reward functions at run time and adapt to novel dynamics, and highlight its advantages compared to existing diffusion-based planning baselines.
Graph schemas as abstractions for transfer learning, inference, and planning
Feb 14, 2023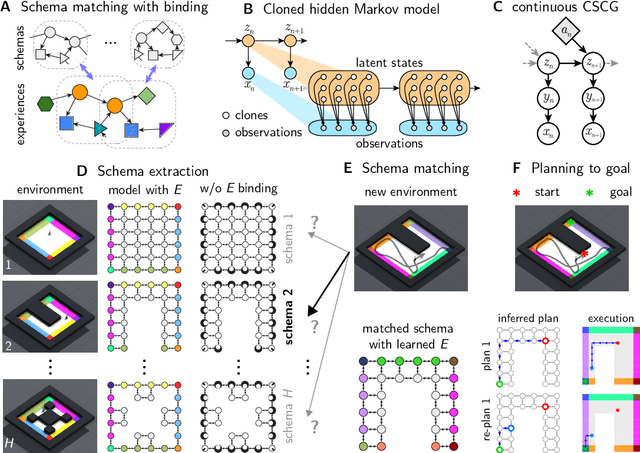



We propose schemas as a model for abstractions that can be used for rapid transfer learning, inference, and planning. Common structured representations of concepts and behaviors -- schemas -- have been proposed as a powerful way to encode abstractions. Latent graph learning is emerging as a new computational model of the hippocampus to explain map learning and transitive inference. We build on this work to show that learned latent graphs in these models have a slot structure -- schemas -- that allow for quick knowledge transfer across environments. In a new environment, an agent can rapidly learn new bindings between the sensory stream to multiple latent schemas and select the best fitting one to guide behavior. To evaluate these graph schemas, we use two previously published challenging tasks: the memory & planning game and one-shot StreetLearn, that are designed to test rapid task solving in novel environments. Graph schemas can be learned in far fewer episodes than previous baselines, and can model and plan in a few steps in novel variations of these tasks. We further demonstrate learning, matching, and reusing graph schemas in navigation tasks in more challenging environments with aliased observations and size variations, and show how different schemas can be composed to model larger 2D and 3D environments.
Beyond imitation: Zero-shot task transfer on robots by learning concepts as cognitive programs
Dec 06, 2018Humans can infer concepts from image pairs and apply those in the physical world in a completely different setting, enabling tasks like IKEA assembly from diagrams. If robots could represent and infer high-level concepts, it would significantly improve their ability to understand our intent and to transfer tasks between different environments. To that end, we introduce a computational framework that replicates aspects of human concept learning. Concepts are represented as programs on a novel computer architecture consisting of a visual perception system, working memory, and action controller. The instruction set of this "cognitive computer" has commands for parsing a visual scene, directing gaze and attention, imagining new objects, manipulating the contents of a visual working memory, and controlling arm movement. Inferring a concept corresponds to inducing a program that can transform the input to the output. Some concepts require the use of imagination and recursion. Previously learned concepts simplify the learning of subsequent more elaborate concepts, and create a hierarchy of abstractions. We demonstrate how a robot can use these abstractions to interpret novel concepts presented to it as schematic images, and then apply those concepts in dramatically different situations. By bringing cognitive science ideas on mental imagery, perceptual symbols, embodied cognition, and deictic mechanisms into the realm of machine learning, our work brings us closer to the goal of building robots that have interpretable representations and commonsense.
Cortical Microcircuits from a Generative Vision Model
Aug 03, 2018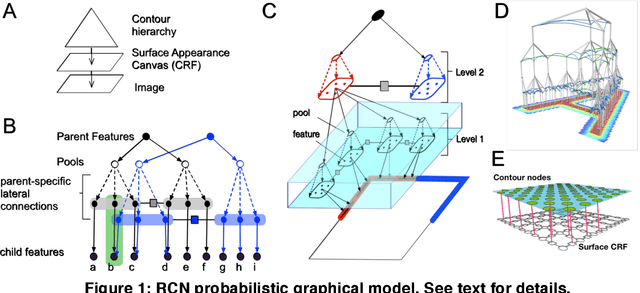
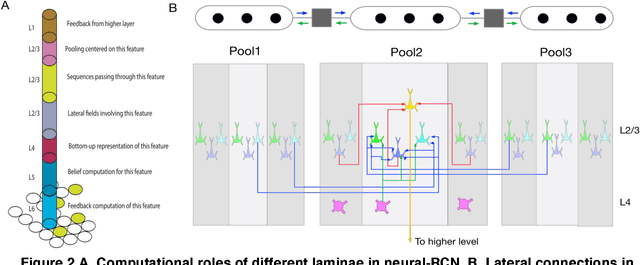
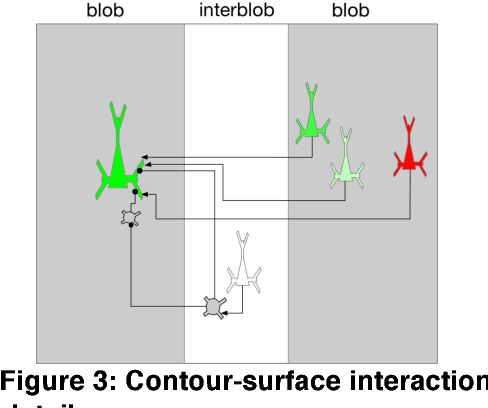
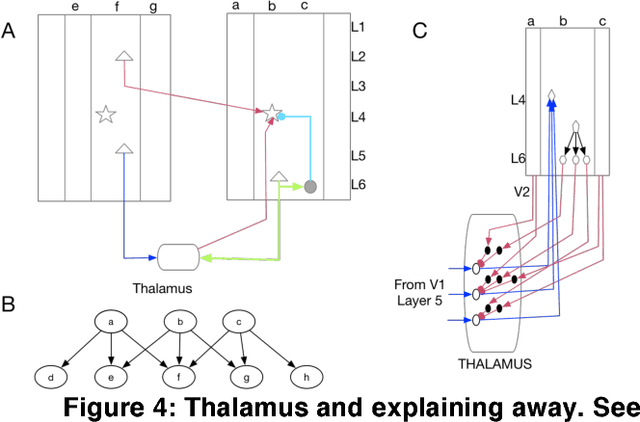
Understanding the information processing roles of cortical circuits is an outstanding problem in neuroscience and artificial intelligence. The theoretical setting of Bayesian inference has been suggested as a framework for understanding cortical computation. Based on a recently published generative model for visual inference (George et al., 2017), we derive a family of anatomically instantiated and functional cortical circuit models. In contrast to simplistic models of Bayesian inference, the underlying generative model's representational choices are validated with real-world tasks that required efficient inference and strong generalization. The cortical circuit model is derived by systematically comparing the computational requirements of this model with known anatomical constraints. The derived model suggests precise functional roles for the feedforward, feedback and lateral connections observed in different laminae and columns, and assigns a computational role for the path through the thalamus.